一种堆垛仓储用搬运机器人
本发明涉及运输或贮存装置,尤其涉及一种堆垛仓储用搬运机器人。
背景技术:
1、为了最大的利用仓储空间,一般会利用立体式的货架将货物码放起来,在此过程中需要使用到堆垛仓储用的搬运机器人。
2、现有技术中的搬运机器人通常是采用叉车式的货叉进行托举,因此需要将货物放置在具有供货叉进出通道的托盘上才能将货物放上货架。现有技术的搬运机器人对托板的依赖性强,并且托板也需要跟随货物放置到货架上无法取下,不能直接对板材、箱体等底部为平面的货物进行堆垛。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本发明提供了一种堆垛仓储用搬运机器人,可以不需要托板即可对底部为平面的货物进行堆垛。
2、本发明提供了一种堆垛仓储用搬运机器人,所述堆垛仓储用搬运机器人包括:
3、升降台;
4、升降机构,所述升降机构用于驱动升降台升降;
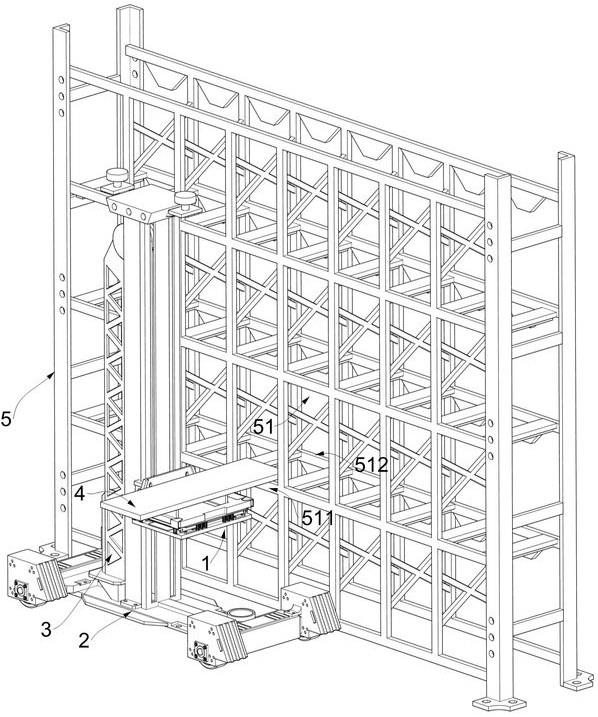
5、所述升降台还包括:第一顶板、第二顶板、第三顶板、平移机构和翻转机构,所述翻转机构用于控制第二顶板或第三顶板翻转;
6、控制柜,所述控制柜用于控制平移机构移动第一顶板和第二顶板顶升底部为平面的货物至货架的货架支撑杆前,并控制翻转机构使第三顶板在货架支撑杆后翻转以支撑所述货物,随后控制翻转机构使第二顶板翻转至货架支撑杆之下,以使得平移机构移动第一顶板和第三顶板顶升所述货物通过货架的货架支撑杆。
7、可选的,所述平移机构包括支撑台、电动滑轨、输送块、输送板和衔接板,所述电动滑轨安装在支撑台上,电动滑轨通过衔接板连接至输送块,输送块上固接有输送板以使得输送板被电动滑轨驱动进行移动;
8、第一顶板、第二顶板、第三顶板和翻转机构安装在输送板上;
9、所述翻转机构包括翻转气缸、翻转滑架和翻转套轴,输送板上安装有翻转气缸,翻转气缸上安装有翻转滑架,第二顶板和第三顶板上均固接有翻转套轴,翻转套轴上开设有翻转滑槽,翻转滑架通过翻转套轴上开设的翻转滑槽与其滑动连接,以控制第二顶板或第三顶板翻转。
10、可选的,所述平移机构还包括:
11、底板、支撑滑板、放置板、放置弹簧、拉回组件和支撑组件,所述底板安装在支撑台上,所述支撑滑板安装在底板上以在支撑滑板与底板之间形成滑道,支撑滑板上滑动连接有放置板,放置板设有用于复位放置板的放置弹簧,衔接板套设在输送块上,支撑滑板上还安装有用于拉出放置板使得输送块下落至底板的拉回组件,所述滑道用于引导输送块向后复位,支撑台上安装有向上复位输送块的支撑组件。
12、可选的,拉回组件包括有圆盘、偏心杆、拉回气缸和导向块,支撑滑板上转动连接有圆盘,圆盘上转动连接有偏心杆,偏心杆另一端与放置板转动连接,支撑滑板上安装有拉回气缸,拉回气缸上安装有与圆盘偏心位置连接的导向块。
13、可选的,支撑组件包括支撑弹簧和支撑板,支撑台上安装有多个支撑弹簧,支撑弹簧上连接有支撑板,所述支撑板与输送板相抵,以向上复位固接在输送板下的输送块。
14、可选的,所述第一顶板安装有第一压力传感器以测量第一顶板所受到的压力,所述第二顶板安装有第二压力传感器以测量第二顶板所受到的压力,所述第三顶板安装有第三压力传感器以测量第三顶板所受到的压力;
15、所述货架的货架支撑杆包括用于支撑货物的设置在前的第一支撑杆和设置在后的第二支撑杆;
16、在平移机构上的第二顶板通过第一支撑杆后,控制柜控制第二顶板翻转以支撑货物,并控制第三顶板翻转至第一支撑杆之下;
17、当第二顶板所受到的压力和第一顶板所受到的压力的差值大于预设的压力值时:
18、若第三顶板所受到的压力大于第一顶板所受到的压力,则将货物在第三顶板的外侧的部分放置在第二支撑杆上,所述第三顶板的外侧是远离第二顶板的一侧;
19、若第二顶板所受到的压力大于第一顶板所受到的压力,且第三顶板所受到的压力小于第一顶板所受到的压力,则将货物位于第二顶板和第三顶板之间的部分放置在第二支撑杆上。
20、可选的,所述升降台还包括急停按钮,输送板的边缘安装有急停按钮,以在输送板发生碰撞时停止输送板的移动。
21、可选的,所述升降台还包括用于扩展急停按钮触发面积的急停按钮扩展组件,所述急停按钮扩展组件包括扩展弹簧和扩展壳,扩展弹簧的一端连接至输送板,扩展弹簧另一端连接扩展壳。
22、可选的,所述升降台还包括有用于锁定第二顶板和第三顶板的锁定机构,锁定机构安装在输送板上,锁定机构包括有锁定导杆、锁定架和传动组件,输送板上固接有锁定导杆,锁定导杆上滑动连接有锁定架,第二顶板和第三顶板上均开设有锁定槽,锁定导杆上安装有用于带动锁定架移动以实现锁定的传动组件。
23、可选的,传动组件包括有电磁铁和复位弹簧,锁定导杆上安装有电磁铁以带动锁定架移入锁定槽,锁定导杆上套有复位弹簧以将锁定架从锁定槽中移出。
24、本发明提供的技术方案与现有技术相比具有如下优点:
25、本发明提供的一种堆垛仓储用搬运机器人,可以通过第二顶板和第三顶板轮流对货物进行支撑,平移机构可以跨过货架的货架支撑杆,从而移动货物至合适的位置以将货物码放在货架上,因此本发明提供的一种堆垛仓储用搬运机器人不需要托板即可对底部为平面的货物进行堆垛。
技术特征:
1.一种堆垛仓储用搬运机器人,其特征在于,所述堆垛仓储用搬运机器人包括:
2.根据权利要求1所述的一种堆垛仓储用搬运机器人,其特征在于,所述平移机构包括支撑台、电动滑轨、输送块、输送板和衔接板,所述电动滑轨安装在支撑台上,电动滑轨通过衔接板连接至输送块,输送块上固接有输送板以使得输送板被电动滑轨驱动进行移动;
3.根据权利要求2所述的一种堆垛仓储用搬运机器人,其特征在于,所述平移机构还包括:
4.根据权利要求3所述的一种堆垛仓储用搬运机器人,其特征在于,拉回组件包括有圆盘、偏心杆、拉回气缸和导向块,支撑滑板上转动连接有圆盘,圆盘上转动连接有偏心杆,偏心杆另一端与放置板转动连接,支撑滑板上安装有拉回气缸,拉回气缸上安装有与圆盘偏心位置连接的导向块。
5.根据权利要求3所述的一种堆垛仓储用搬运机器人,其特征在于,支撑组件包括支撑弹簧和支撑板,支撑台上安装有多个支撑弹簧,支撑弹簧上连接有支撑板,所述支撑板与输送板相抵,以向上复位固接在输送板下的输送块。
6.根据权利要求1所述的一种堆垛仓储用搬运机器人,其特征在于,所述第一顶板安装有第一压力传感器以测量第一顶板所受到的压力,所述第二顶板安装有第二压力传感器以测量第二顶板所受到的压力,所述第三顶板安装有第三压力传感器以测量第三顶板所受到的压力;
7.根据权利要求2所述的一种堆垛仓储用搬运机器人,其特征在于,所述升降台还包括急停按钮,输送板的边缘安装有急停按钮,以在输送板发生碰撞时停止输送板的移动。
8.根据权利要求7所述的一种堆垛仓储用搬运机器人,其特征在于,所述升降台还包括用于扩展急停按钮触发面积的急停按钮扩展组件,所述急停按钮扩展组件包括扩展弹簧和扩展壳,扩展弹簧的一端连接至输送板,扩展弹簧另一端连接扩展壳。
9.根据权利要求2所述的一种堆垛仓储用搬运机器人,其特征在于,所述升降台还包括有用于锁定第二顶板和第三顶板的锁定机构,锁定机构安装在输送板上,锁定机构包括有锁定导杆、锁定架和传动组件,输送板上固接有锁定导杆,锁定导杆上滑动连接有锁定架,第二顶板和第三顶板上均开设有锁定槽,锁定导杆上安装有用于带动锁定架移动以实现锁定的传动组件。
10.按照权利要求9所述的一种堆垛仓储用搬运机器人,其特征在于,传动组件包括有电磁铁和复位弹簧,锁定导杆上安装有电磁铁以带动锁定架移入锁定槽,锁定导杆上套有复位弹簧以将锁定架从锁定槽中移出。
技术总结
本发明涉及运输或贮存装置技术领域,尤其涉及一种堆垛仓储用搬运机器人。所述堆垛仓储用搬运机器人包括:升降台;升降机构,所述升降机构用于驱动升降台升降;所述升降台还包括:第一顶板、第二顶板、第三顶板、平移机构和翻转机构,所述翻转机构用于控制第二顶板或第三顶板翻转;控制柜,所述控制柜用于控制平移机构移动第一顶板和第二顶板顶升底部为平面的货物至货架的货架支撑杆前,并控制翻转机构使第三顶板在货架支撑杆后翻转以支撑所述货物,随后控制翻转机构使第二顶板翻转至货架支撑杆之下,以使得平移机构移动第一顶板和第三顶板顶升所述货物通过货架的货架支撑杆。
技术研发人员:李晶,关成斌,张永棠,黄中友,杨斌
受保护的技术使用者:广东东软学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!