一种深井式稳定的重力储能系统
本发明涉及储能装置,特别涉及一种深井式稳定的重力储能系统。
背景技术:
1、目前重力储能系统面临的主要问题是混凝土的自重大,起重机需要高精度的抓放才能将混凝土重块堆叠成塔状结构,以降低安全风险,且在高空由于风的作用,使钢索晃动更加难以稳定定位,稳定性低,不利于推广使用。
技术实现思路
1、本发明的目的是为了解决背景技术中的不足而提供一种深井式稳定的重力储能系统。
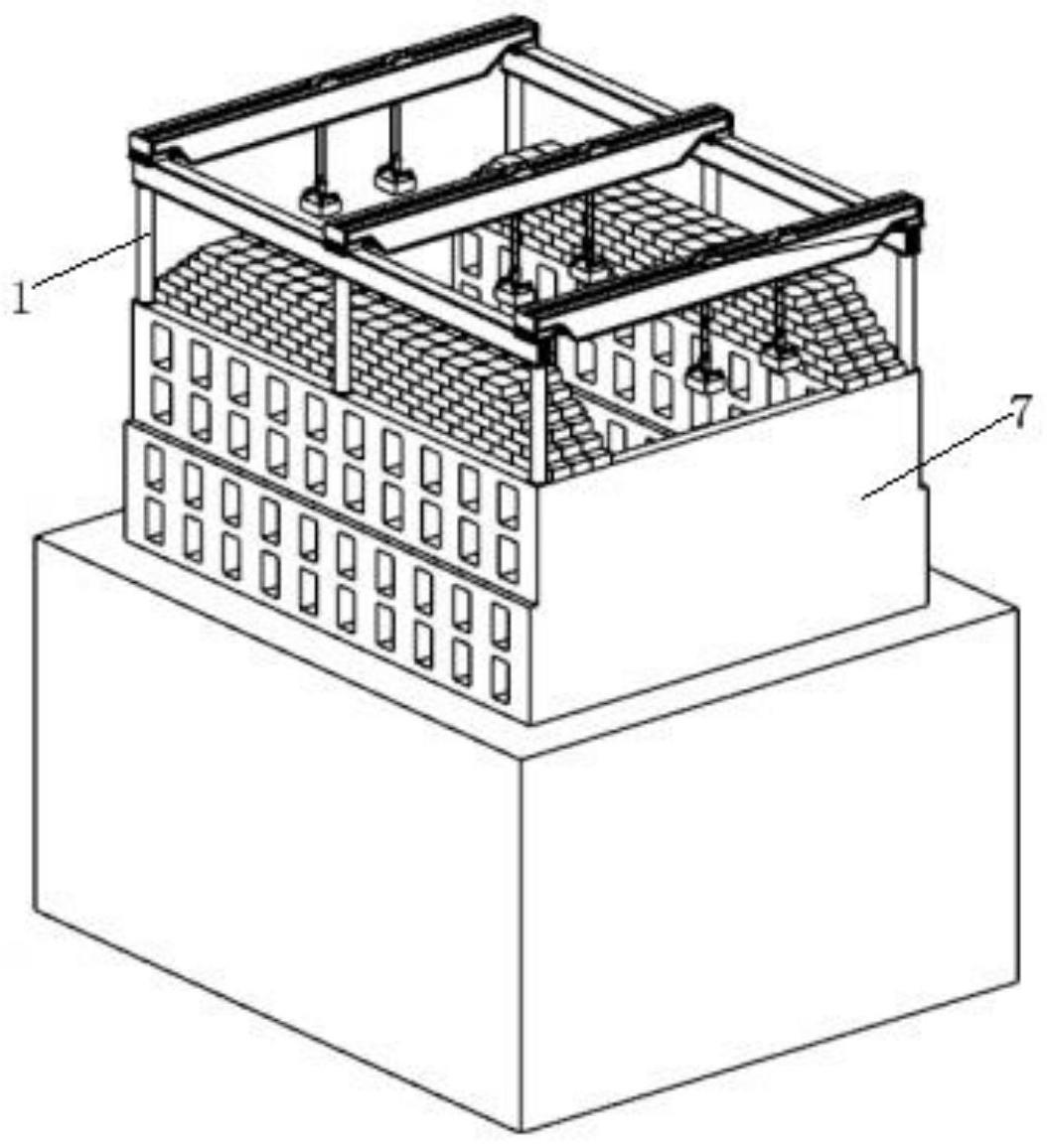
2、一种深井式稳定的重力储能系统,包括多组门式移动装置、发电驱动装置、卷扬装置、钢索、抓取装置、混凝土重块和地基;
3、地基中部为内凹结构,地基两侧安装有门式移动装置,门式移动装置上均设有发电驱动装置和卷扬装置,发电驱动装置与卷扬装置连接,卷扬装置上缠绕有钢索,钢索下端连接有抓取装置,抓取装置用于抓取混凝土重块。
4、更进一步而言,所述的门式移动装置包括横梁、滑座和滑动装置,横梁滑动连接在滑座上端,滑动装置滑动连接在横梁下端,横梁用于带动滑动装置在滑座上往复移动,滑动装置能在横梁下端往复移动。
5、更进一步而言,所述的钢索下端连接有吊环,吊环下端设有刚性连杆,刚性连杆下端连接有定位装置及四个抓取装置,定位装置可以采用红外测量的方式测量混凝土重块中心到混凝土重块边缘的距离并将信号反馈给门式移动装置,门式移动装置控制四个抓取装置分别对应到混凝土重块的四个对应孔中并卡紧固定。
6、更进一步而言,所述的定位装置为视觉传感器。
7、更进一步而言,所述的抓取装置包括支架、气缸、推杆、连杆、带支点摇杆和卡钩,支架内部设有气缸,气缸活动端固定连接有推杆,连杆首端均与推杆下端铰接,连杆末端与带支点摇杆首端铰接,带支点摇杆中部与支架铰接,带支点摇杆下部活动连接在支架下端两侧滑槽内并能延伸至滑槽外与混凝土重块的孔中并卡紧固定。
8、更进一步而言,所述的支架下端为锥形结构。
9、本发明的有益效果:
10、本发明可以更稳定的抓取和释放混凝土重块,整个系统的安全性得到显著提升,同时实现了高精度的抓放;
11、改进了地基结构,降低了钢索由于风引起摆动而导致的抓取装置精度下降的缺点,进一步提升了本系统的稳定性;
12、通过多组门式移动装置控制多个抓取装置,实现了更稳定的重力势能转化和电能的输出,显著降低了发电驱动装置供电不稳定的问题。
技术特征:
1.一种深井式稳定的重力储能系统,其特征在于:包括多组门式移动装置(1)、发电驱动装置(2)、卷扬装置(3)、钢索(4)、抓取装置(5)、混凝土重块(6)和地基(7);
2.根据权利要求1所述的一种深井式稳定的重力储能系统,其特征在于:所述的门式移动装置(1)包括横梁、滑座和滑动装置,横梁滑动连接在滑座上端,滑动装置滑动连接在横梁下端,横梁用于带动滑动装置在滑座上往复移动,滑动装置能在横梁下端往复移动。
3.根据权利要求1所述的一种深井式稳定的重力储能系统,其特征在于:所述的钢索(4)下端连接有吊环(40),吊环(40)下端设有刚性连杆(41),刚性连杆(41)下端连接有定位装置(42)及四个抓取装置(5),定位装置(42)采用红外测量的方式测量混凝土重块(6)中心到混凝土重块(6)边缘的距离并将信号反馈给门式移动装置(1),门式移动装置(1)控制四个抓取装置(5)分别对应到混凝土重块(6)的四个对应孔中并卡紧固定。
4.根据权利要求3所述的一种深井式稳定的重力储能系统,其特征在于:所述的定位装置(42)为视觉传感器。
5.根据权利要求3所述的一种深井式稳定的重力储能系统,其特征在于:所述的抓取装置(5)包括支架(50)、气缸(51)、推杆(52)、连杆(53)、带支点摇杆(54)和卡钩(55),支架(50)内部设有气缸(51),气缸(51)活动端固定连接有推杆(52),连杆(53)首端均与推杆(52)下端铰接,连杆(53)末端与带支点摇杆(54)首端铰接,带支点摇杆(54)中部与支架(50)铰接,带支点摇杆(54)下部活动连接在支架(50)下端两侧滑槽内并能延伸至滑槽外与混凝土重块(6)的孔中并卡紧固定。
6.根据权利要求5所述的一种深井式稳定的重力储能系统,其特征在于:所述的支架(50)下端为锥形结构。
技术总结
本发明公开了一种深井式稳定的重力储能系统,包括多组门式移动装置、发电驱动装置、卷扬装置、钢索、抓取装置、混凝土重块和地基;地基中部为内凹结构,地基两侧安装有门式移动装置,门式移动装置上均设有发电驱动装置和卷扬装置,发电驱动装置与卷扬装置连接,卷扬装置上缠绕有钢索,钢索下端连接有抓取装置,抓取装置用于抓取混凝土重块。本发明可以更稳定的抓取和释放混凝土重块,整个系统的安全性得到显著提升,同时实现了高精度的抓放;改进了地基结构,降低了钢索由于风引起摆动而导致的抓取装置精度下降的缺点,进一步提升了本系统的稳定性;通过多组门式移动装置控制多个抓取装置,实现了更稳定的重力势能转化和电能的输出。
技术研发人员:李湘吉,杨凯博,刘纯国,隋振
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!