船载起重机起吊端物体位姿平衡的补偿装置及补偿方法
本发明涉及船载起重机,尤其涉及一种船载起重机起吊端物体位姿平衡的补偿装置及补偿方法。
背景技术:
1、船舰在恶劣的海洋环境下会产生横荡、纵荡、升沉和横摇、纵摇、艏摇六个自由度的运动,船载起重机起吊端吊装物体会随之出现剧烈运动,如不及时对起吊端物体姿态进行调整很容易造成严重事故。船舶在遭受横荡、纵荡和艏摇时可以通过调整自身的姿态来保持平衡,但在海浪环境下船舶在遭受横摇、纵摇和升沉时起重机起吊端物体的位姿却无法保证平衡。
2、目前有一种基于逆运动学的船载起重机起吊端位置实时补偿控制方法,其利用惯导传感器检测平台模拟船舶运动的实时姿态信号,建立整个系统平台的全局坐标系,根据姿态信号结合各坐标系齐次变换计算出船载机械臂起吊端位置变化,通过逆运动学算法求解出机械臂关节转动角度。
3、还有一种基于双目视觉的主动式波浪补偿方法。该方法在起重机上装备了八套带有钢丝绳的伺服电机和两台摄像机。两台摄像机对起吊端物体位姿进行检测,通过检测出的起吊端物体位姿的偏移,计算出伺服电机的转向和转动角度。伺服电机根据转向和转动角度对物体的位姿进行调整。
4、目前起重机起吊端重物大多采用单吊绳的方式,在受海浪影响下起吊端物体姿态的平衡难以得到保证。两种主流的方法是基于船舶姿态传感器的信息进行补偿和基于机器视觉进行补偿。
5、基于船舶姿态传感器的信息进行补偿,通过监测船舶运动状态对起重机关节转动角度求解,虽然能计算出物体的位置偏移,但是在控制起重机关节转动时,起吊端物体的位姿无法保证其平衡,同时受海况影响,吊装物体会出现一种不平衡的姿态,无法对物体的姿态进行调整。
6、机器视觉补偿方法在起吊端物体摆动幅度较小时有着较好的效果,但当风浪较大时,起吊端物体摆动的幅度和频率变大,机器视觉往往不能快速的对起吊端物体的位姿进行识别,如果出现了无法识别的情况将严重影响对起吊端物体的补偿效果,基于此,提供一种新的起重机起吊端物体多点起吊的补偿装置及方法至关重要。
技术实现思路
1、本发明提供一种船载起重机起吊端物体位姿平衡的补偿装置及补偿方法,用以解决现有技术中起重机起吊端物体平衡位姿不好调节的缺陷。
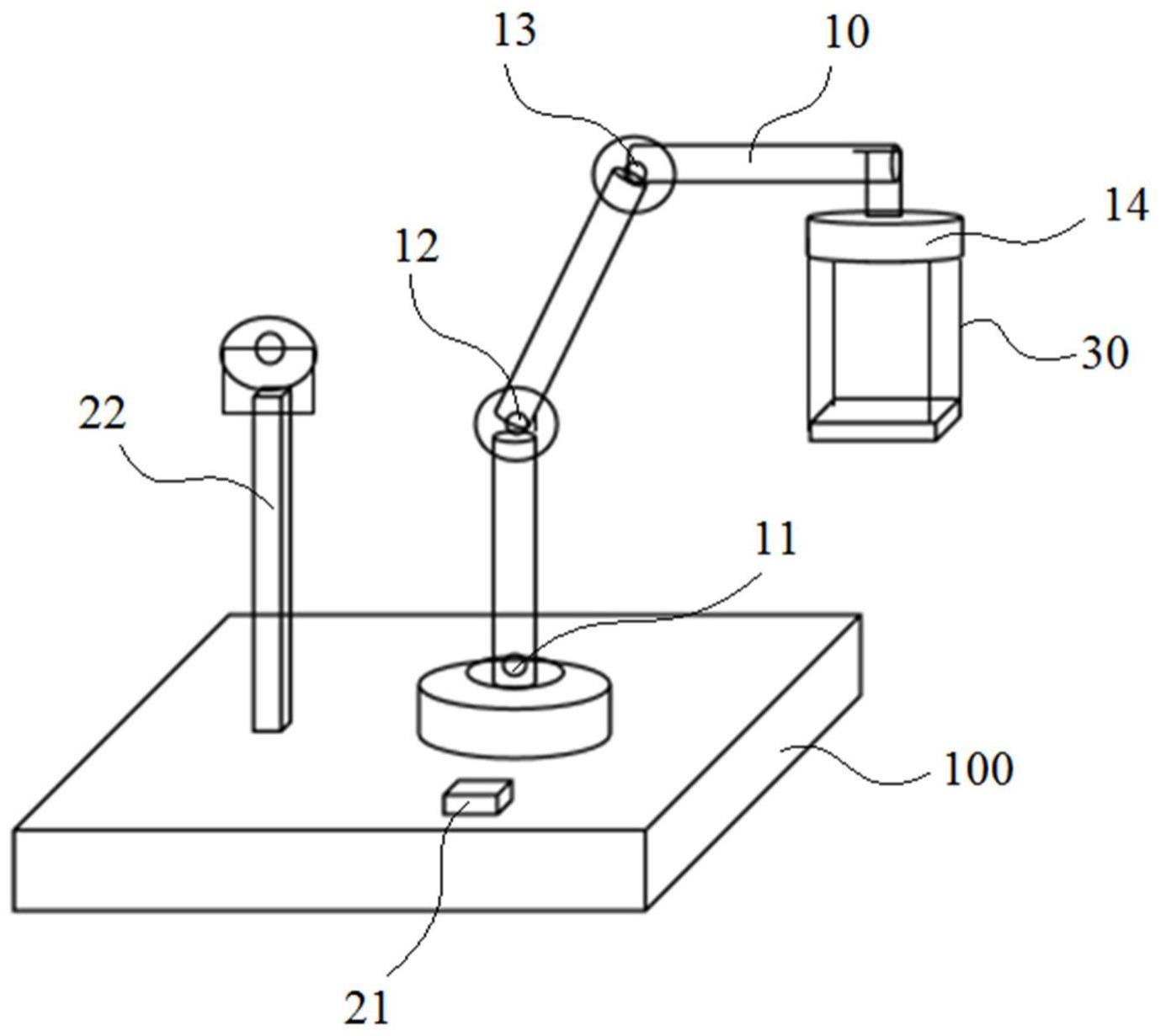
2、本发明提供一种船载起重机起吊端物体位姿平衡的补偿装置,包括:起重机,设置于船舶甲板平台上,所述起重机的起吊端通过多根吊绳吊装物体;检测组件,设置于所述船舶甲板平台上,所述检测组件用于实时获取船舶的位姿和物体的图像信息;控制器,用于根据船舶的当前位姿,控制起重机各关节转动,以对物体的偏移位置进行调节,所述控制器还用于根据物体的图像信息计算各起吊点相对于同一水平面的距离,并根据所述距离调节各吊绳的长度,以使物体处于平衡状态。
3、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿装置,所述检测组件包括:姿态传感器,设置于所述船舶甲板平台上,所述姿态传感器用于实时获取船舶的位姿;图像获取元件,设置于所述船舶甲板平台上,所述图像获取元件用于实时获取物体的图像信息。
4、本发明还提供一种利用如上所述的船载起重机起吊端物体位姿平衡的补偿装置进行的补偿方法,包括:实时获取船舶的位姿,基于所述位姿控制起重机各关节转动,以对物体的偏移位置进行调节;实时获取物体的图像信息,基于所述图像信息预测出物体再次处于平衡状态时各个起吊点的第一空间坐标;获取物体当前的图像信息,基于当前的图像信息得到当前各起吊点的第二空间坐标;基于所述第二空间坐标与所述第一空间坐标的差值,调节各吊绳的长度。
5、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述实时获取船舶的位姿,基于所述位姿控制起重机各关节转动,以对物体的偏移位置进行调节的步骤进一步包括:基于船舶的所述位姿通过运动学公式求逆解计算得到起重机各关节的补偿角度;基于所述补偿角度控制起重机各关节转动。
6、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述实时获取物体的图像信息,基于所述图像信息预测出物体再次处于平衡状态时多个起吊点的第一空间坐标的步骤进一步包括:获取物体图像信息的红绿蓝图像,经网络模型处理后预测得到物体再次处于平衡状态时各起吊点的所述第一空间坐标。
7、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述基于所述第二空间坐标与所述第一空间坐标的差值,调节各吊绳的长度的步骤进一步包括:获取物体起吊前处于平衡状态时,各个起吊点所在平面的第一中心点的坐标;获取物体再次处于平衡状态时,各个起吊点所在平面的第二中心点的坐标;基于各起吊点与所述第二中心点的距离等于各起吊点与所述第一中心点的距离的关系,计算物体处于平衡状态时各起吊点的实际空间坐标。
8、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述基于所述第二空间坐标与所述第一空间坐标的差值,调节各吊绳的长度的步骤还包括:获取物体起吊前处于平衡状态时,各个吊绳的第一长度;基于所述实际空间坐标计算各吊绳的第二长度;基于所述第二长度与所述第一长度的差值计算各吊绳的调节量。
9、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,获取物体起吊前处于平衡状态时,多个起吊点所在平面的第一中心点的坐标的步骤进一步包括:获取物体起吊前处于平衡状态时的红绿蓝图像,经网络模型处理后得到物体各个起吊点的第三空间坐标;基于所述第三空间坐标,计算所述第一中心点的坐标。
10、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述获取物体起吊前处于平衡状态时的图像信息,基于物体起吊前处于平衡状态的图像信息得到物体各个起吊点的第三空间坐标的步骤进一步包括:获取物体起吊前处于平衡状态时图像信息的红绿蓝图像,经网络模型处理后得到物体各个起吊点的所述第三空间坐标。
11、根据本发明提供的一种船载起重机起吊端物体位姿平衡的补偿方法,所述获取物体再次处于平衡状态时,多个起吊点所在平面的第二中心点的坐标的步骤进一步包括:基于所述第一空间坐标,计算所述第二中心点的坐标。
12、本发明提供的船载起重机起吊端物体位姿平衡的补偿装置,通过设置检测组件、控制器,并采用多根吊绳起吊物体,可在船舶发生横摇、纵摇和升沉时,通过调节起重机各关节的转动角度和各吊绳的长度,自动对物体的位置和各吊绳的长度进行调节,从而使物体的位置和姿态能够实时处于平衡状态,提高了船舶上起重机吊装物体时的稳定性,有效抑制了物体的摇晃情况,降低了受恶劣海况影响下物体受损伤的风险性,利于生产和推广应用。
技术特征:
1.一种船载起重机起吊端物体位姿平衡的补偿装置,其特征在于,包括:
2.根据权利要求1所述的船载起重机起吊端物体位姿平衡的补偿装置,其特征在于,所述检测组件包括:
3.一种利用权利要求1或2所述的船载起重机起吊端物体位姿平衡的补偿装置进行的补偿方法,其特征在于,包括:
4.根据权利要求3所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述实时获取船舶的位姿,基于所述位姿控制起重机各关节转动,以对物体的偏移位置进行调节的步骤进一步包括:
5.根据权利要求3所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述实时获取物体的图像信息,基于所述图像信息预测出物体再次处于平衡状态时多个起吊点的第一空间坐标的步骤进一步包括:
6.根据权利要求3所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述基于所述第二空间坐标与所述第一空间坐标的差值,调节各吊绳的长度的步骤进一步包括:
7.根据权利要求6所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述基于所述第二空间坐标与所述第一空间坐标的差值,调节各吊绳的长度的步骤还包括:
8.根据权利要求6所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,获取物体起吊前处于平衡状态时,多个起吊点所在平面的第一中心点的坐标的步骤进一步包括:
9.根据权利要求8所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述获取物体起吊前处于平衡状态时的图像信息,基于物体起吊前处于平衡状态的图像信息得到物体各个起吊点的第三空间坐标的步骤进一步包括:
10.根据权利要求6所述的船载起重机起吊端物体位姿平衡的补偿方法,其特征在于,所述获取物体再次处于平衡状态时,多个起吊点所在平面的第二中心点的坐标的步骤进一步包括:
技术总结
本发明涉及船载起重机技术领域,提供一种船载起重机起吊端物体位姿平衡的补偿装置及补偿方法。上述的船载起重机起吊端物体位姿平衡的补偿装置,包括:起重机、检测组件和控制器,起重机设置于船舶甲板平台上,起重机的起吊端通过多根吊绳吊装物体;检测组件设置于船舶甲板平台上,检测组件用于实时获取船舶的位姿和物体的图像信息;控制器用于控制起重机各关节转动以及调节各吊绳的长度,以使物体处于平衡状态。上述的船载起重机起吊端物体位姿平衡的补偿装置,可在船舶发生横摇、纵摇和升沉时,自动对物体的位置和各吊绳的长度进行调节,从而使物体的位置和姿态能够实时处于平衡状态,提高了船舶上起重机吊装物体时的稳定性。
技术研发人员:陈姚节,田野,邓成宇,王晓海,汪丁泉,彭孝文,林云汉
受保护的技术使用者:武汉科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!