一种具有升降转动功能的组培苗上架机器人
本发明涉及植物栽培领域,具体是一种具有升降转动功能的组培苗上架机器人。
背景技术:
1、作为现代生物工程的基础,组织培养技术是农业高新技术中最重要、最活跃的领域之一,目前组织培养广泛应用于苗木、花卉、蔬菜等植物的大量繁殖,在世界范围内已进入大规模生产应用阶段,国内对组培技术领域的经费投入也不断增加。
2、组培筐是组织培养的重要容器,用于植物的无土栽培。在实际操作过程中,植物在育苗、生长、繁殖等各阶段需要移动到不同位置,目前主要依靠人工将整筐组培苗分层放置在组培架。由于组培架较高,人工上架时存在安全隐患,并且人工成本在组培苗相关研究中占比越来越大,削弱了组培苗在市场上的竞争力。
技术实现思路
1、本发明的目的是克服上述背景技术中的不足,提供一种具有升降转动功能的组培苗上架机器人,该机器人应能实现整筐组培苗分层上架,并具有节省人力、降低成本、效率高、安全系数大的特点。
2、本发明的技术方案是:
3、一种具有升降转动功能的组培苗上架机器人,包括装载组培筐的行走平台;其特征在于:所述行走平台上设有用于抓取组培筐的抓钩机构、将抓钩机构推动到行走平台一侧的转向机构、带动抓钩机构竖直移动的升降机构。
4、所述升降机构包括升降机架、与升降机架固定的升降电机、可竖直滑动地定位在升降机架上的升降平台、传递升降电机动力驱动升降平台竖直移动的升降传动组件。
5、所述转向机构包括可摆动地定位在升降平台上的转向平台、两端可转动地铰接在升降平台与转向平台之间的转向电推杆。
6、所述抓钩机构包括设置在转向平台两端的抓钩电推杆以及由抓钩电推杆驱动的抓钩。
7、所述升降传动组件包括可转动地定位在升降机架上的丝杆、与升降电机转轴固定的主动带轮、与丝杆固定的被动带轮、连接主动带轮与被动带轮的同步带、与丝杆啮合并与升降平台固定的升降螺母。
8、所述升降机架上设有竖直布置的升降滑轨以及可沿着升降滑轨竖直滑动的升降滑块,升降平台与升降滑块固定。
9、所述抓钩通过抓钩滑块可水平滑动地定位在抓钩承托板的两端,抓钩承托板通过直角固定座固定在转向平台的底部,抓钩承托板的两端设有引导抓钩滑块水平滑动的滑槽。
10、所述抓钩包括与抓钩滑块固定的套筒、可轴向滑动地定位在套筒中的升降杆、驱动升降杆竖直运动的齿轮齿条组件、固定在升降杆底端的弯钩。
11、所述行走平台为手推车。
12、本发明的有益效果是:
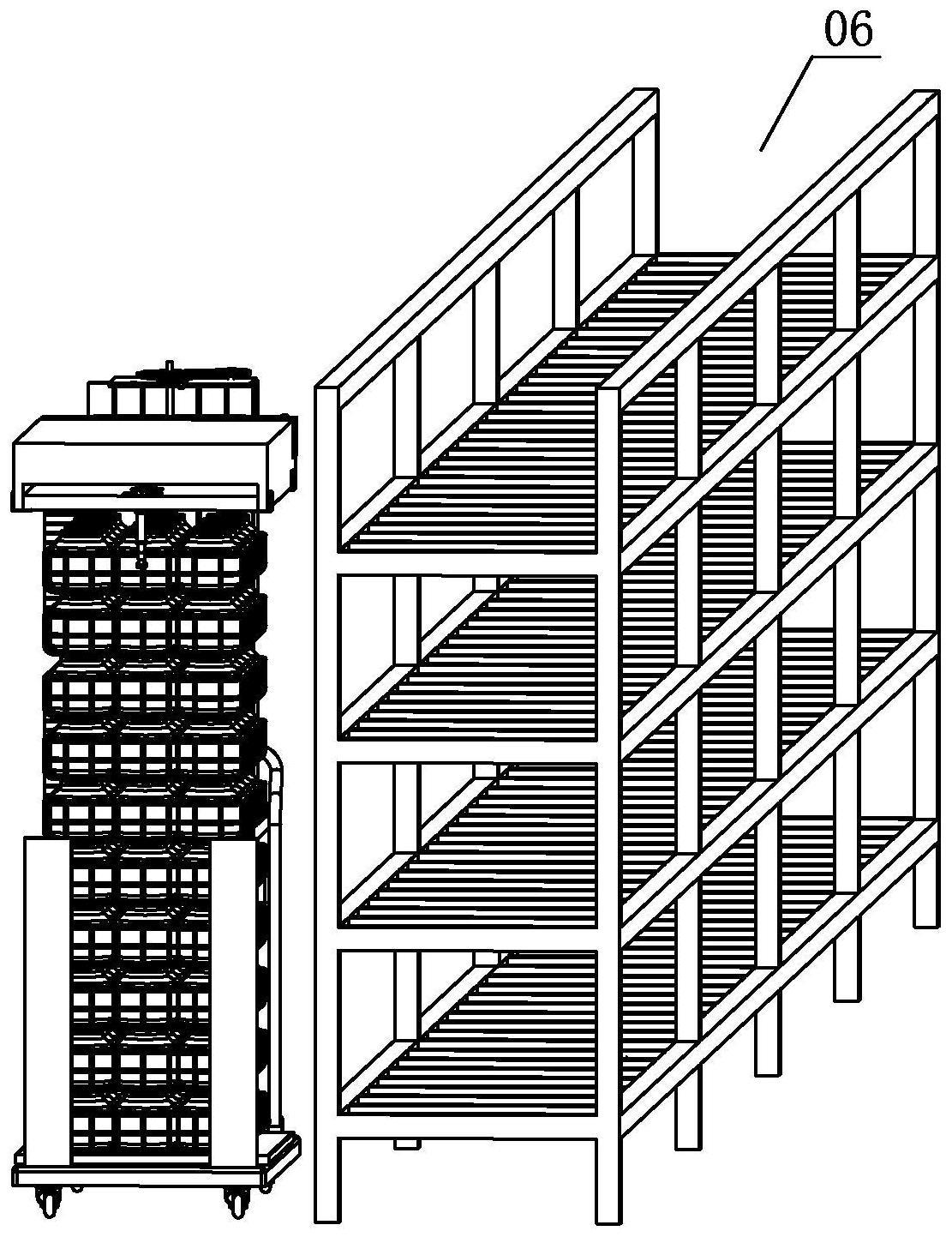
13、本发明用于组培苗工厂整筐组培苗的分层上架,可适应在窄空间行走并将整筐组培苗安全、稳定地放置在组培架中;其中的抓钩机构用于抓取组培筐,升降机构用于调整抓钩机构与组培筐的高度,转向机构用于将行走平台上的组培筐推入组培架中,实现了组培筐的自动化整筐旋转搬移与上架,提升了操作的安全系数,提高了工作效率,降低了成本。
技术特征:
1.一种具有升降转动功能的组培苗上架机器人,包括装载组培筐的行走平台(01);其特征在于:所述行走平台上设有用于抓取组培筐的抓钩机构(04)、将抓钩机构推动到行走平台一侧的转向机构(03)、带动抓钩机构竖直移动的升降机构(02)。
2.根据权利要求1所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述升降机构包括升降机架(0201)、与升降机架固定的升降电机(0210)、可竖直滑动地定位在升降机架上的升降平台(0301)、传递升降电机动力驱动升降平台竖直移动的升降传动组件。
3.根据权利要求2所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述转向机构包括可摆动地定位在升降平台上的转向平台(0302)、两端可转动地铰接在升降平台与转向平台之间的转向电推杆(0306)。
4.根据权利要求3所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述抓钩机构包括设置在转向平台两端的抓钩电推杆(0308)以及由抓钩电推杆驱动的抓钩。
5.根据权利要求4所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述升降传动组件包括可转动地定位在升降机架上的丝杆(0204)、与升降电机转轴固定的主动带轮(0207)、与丝杆固定的被动带轮(0206)、连接主动带轮与被动带轮的同步带(0208)、与丝杆啮合并与升降平台固定的升降螺母。
6.根据权利要求5所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述升降机架上设有竖直布置的升降滑轨(0212)以及可沿着升降滑轨竖直滑动的升降滑块(0203),升降平台与升降滑块固定。
7.根据权利要求6所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述抓钩通过抓钩滑块(0309)可水平滑动地定位在抓钩承托板(0303)的两端,抓钩承托板通过直角固定座(0304)固定在转向平台的底部,抓钩承托板的两端设有引导抓钩滑块水平滑动的滑槽(0311)。
8.根据权利要求7所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述抓钩包括与抓钩滑块固定的套筒(0401)、可轴向滑动地定位在套筒中的升降杆(0402)、驱动升降杆竖直运动的齿轮齿条组件、固定在升降杆底端的弯钩(0403)。
9.根据权利要求8所述的一种具有升降转动功能的组培苗上架机器人,其特征在于:所述行走平台为手推车。
技术总结
本发明涉及植物栽培领域。目的是提供一种具有升降转动功能的组培苗上架机器人,该机器人应能实现整筐组培苗分层上架,并具有节省人力、降低成本、效率高、安全系数大的特点。技术方案是:一种具有升降转动功能的组培苗上架机器人,其特征在于:所述行走平台上设有用于抓取组培筐的抓钩机构、将抓钩机构推动到行走平台一侧的转向机构、带动抓钩机构竖直移动的升降机构。
技术研发人员:熊宵,童俊华,樊凯,廖强
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!