运输机器人的制作方法
本发明涉及机器人,特别是涉及一种运输机器人。
背景技术:
1、老化测试项目是指模拟产品在现实使用条件中涉及到的各种因素对产品产生老化的情况进行相应条件加强实验的过程,该实验主要针对塑胶材料,常见的老化主要有光照老化,湿热老化,热风老化。
2、在笔记本电脑的生产过程中,同样要对其进行老化测试,而常见的方式是利用老化测试柜进行老化测试;现代化的老化测试逐渐普及自动化,而在将笔记本电脑放入测试柜中进行测试的过程中,往往是利用人工将笔记本电脑放入老化测试柜中。
3、上述操作方式,在应对少量的产品测试,是足以应对的,但是在对批量的笔记本电脑进行老化测试中,人工的放入方式,工作效率就十分不足了,因此有必要研究一种解决方案。
技术实现思路
1、基于此,本发明提出一种运输机器人,以解决在对批量的笔记本电脑进行老化测试中,人工的放入方式,工作效率就十分不足的问题。
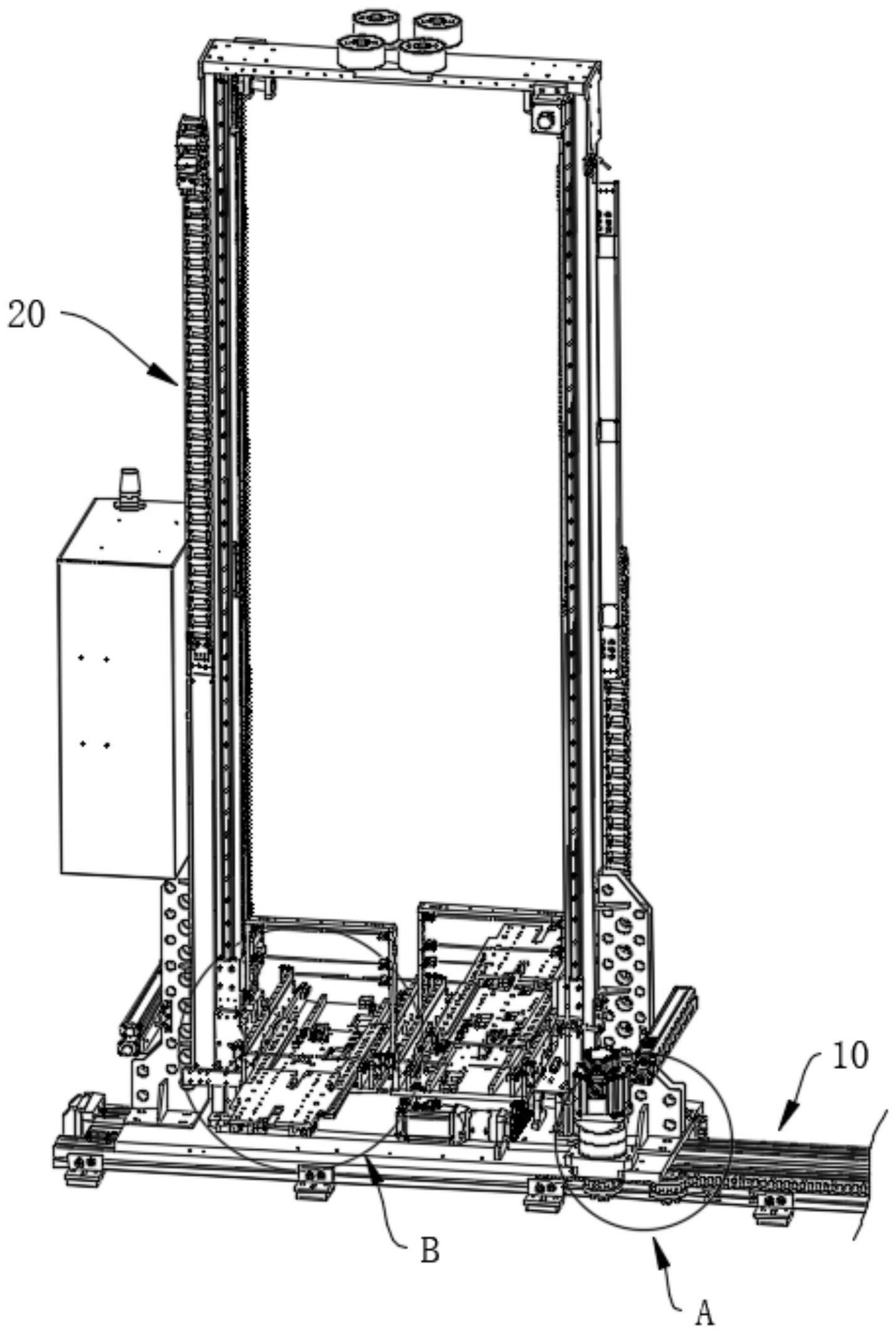
2、为了解决上述技术问题,本发明采用如下技术方案:一种运输机器人,包括x轴移动模组、z轴移动模组、第一y轴移动模组、第二y轴移动模组以及承载部;z轴移动模组,设于所述x轴移动模组上;第一y轴移动模组,设于所述z轴移动模组上;第二y轴移动模组,设于所述第一y轴移动模组上;承载部,设于所述第一y轴移动模组上;所述第二y轴与所述承载部驱动连接,以驱动所述第承载部滑移,所述承载部靠近所述x轴移动模组的一端设有缺口。
3、作为优选,所述x轴移动模组包括第一驱动机构、底座导轨以及滑动设置于所述底座导轨上的工作台,所述第一y轴移动模组设于所述工作台上,所述第一驱动机构被配置为驱动所述工作台在所述底座导轨上滑移。
4、作为优选,所述第一驱动机构包括设于底座导轨长度方向的第一齿条、转动设于所述工作台的第一齿轮以及设于所述工作台上的第一电机,所述第一齿轮与所述第一齿条啮合,所述第一电机与所述第一齿轮驱动连接,被配置为带动所述第一齿轮转动。
5、作为优选,所述第一y轴移动模组包括设于所述z轴移动模组的第一基座、滑动设于所述第一基座的第二基座以及设于所述第一基座的第二驱动机构,所述第二y轴移动模组设于所述第二基座上,所述第二驱动机构被设置为驱动所述第二基座在所述第一基座上滑移。
6、作为优选,所述第二驱动机构包括设于所述第二基座的第二齿条、转动设置于所述第一基座的第二齿轮以及设于所述第一基座的驱动组件,所述第二齿轮与所述第二齿条啮合;所述驱动组件与所述第二齿轮驱动连接,以驱动所述第二齿轮转动。
7、作为优选,所述驱动组件包括设于所述第一基座的第二电机、设于所述第二电机的输出轴的第三齿轮,所述第三齿轮与所述第二齿轮啮合。
8、作为优选,所述第二y轴移动模组包括同步带以及设于所述第一y轴移动模组上的第三电机,所述承载部滑动设于第一y轴移动模组上,所述承载部与所述同步带连接;所述第三电机与所述同步带驱动连接,被设置为带动所述第一同步轮转动。
9、作为优选,所述z轴移动模组包括设于所述x轴移动模组的安装座、转动设置于所述安装座上的第一链条以及设于所述x轴移动模组的第四驱动机构;所述第一y轴移动模组滑动设置于所述安装座,且与所述第一链条连接,所述第四驱动机构用于驱动所述第一链条转动。
10、作为优选,所述第四驱动机构包括传动组件、设于所述x轴移动模组上的第四电机以及均转动设置于所述安装座上的第四齿轮和第五齿轮,所述第一链条套设于所述第四齿轮和第五齿轮上,所述第四电机通过所述传动组件带动所述第四齿轮转动。
11、作为优选,所述传动组件包括第六齿轮、第七齿轮、传动轴和第二链条,所述第六齿轮与所述第四电机连接,所述第二链条套设于所述第六齿轮和第七齿轮,所述传动轴的两端分别与所述第七齿轮以及所述第四齿轮。
12、本发明的有益效果如下:本发明的运输机器人取代了手动的方式,使用自动化的手段,可将笔记本电脑放入老化测试柜或将其从老化测试柜中取出,操作快捷便利、自动化程度高,可大幅提高批量老化测试的工作效率,因此十分值得推广应用。
技术特征:
1.一种运输机器人,其特征在于,包括:
2.根据权利要求1所述的运输机器人,其特征在于:所述x轴移动模组包括第一驱动机构、底座导轨以及滑动设置于所述底座导轨上的工作台,所述第一y轴移动模组设于所述工作台上,所述第一驱动机构被配置为驱动所述工作台在所述底座导轨上滑移。
3.根据权利要求2所述的运输机器人,其特征在于:所述第一驱动机构包括设于底座导轨长度方向的第一齿条、转动设于所述工作台的第一齿轮以及设于所述工作台上的第一电机,所述第一齿轮与所述第一齿条啮合,所述第一电机与所述第一齿轮驱动连接,被配置为带动所述第一齿轮转动。
4.根据权利要求1所述的运输机器人,其特征在于:所述第一y轴移动模组包括设于所述z轴移动模组的第一基座、滑动设于所述第一基座的第二基座以及设于所述第一基座的第二驱动机构,所述第二y轴移动模组设于所述第二基座上,所述第二驱动机构被设置为驱动所述第二基座在所述第一基座上滑移。
5.根据权利要求4所述的运输机器人,其特征在于:所述第二驱动机构包括设于所述第二基座的第二齿条、转动设置于所述第一基座的第二齿轮以及设于所述第一基座的驱动组件,所述第二齿轮与所述第二齿条啮合;所述驱动组件与所述第二齿轮驱动连接,以驱动所述第二齿轮转动。
6.根据权利要求5所述的运输机器人,其特征在于:所述驱动组件包括设于所述第一基座的第二电机、设于所述第二电机的输出轴的第三齿轮,所述第三齿轮与所述第二齿轮啮合。
7.根据权利要求所述1的运输机器人,其特征在于:所述第二y轴移动模组包括同步带以及设于所述第一y轴移动模组上的第三电机,所述承载部滑动设于第一y轴移动模组上,所述承载部与所述同步带连接;所述第三电机与所述同步带驱动连接,被设置为带动所述第一同步轮转动。
8.根据权利要求1所述的运输机器人,其特征在于:所述z轴移动模组包括设于所述x轴移动模组的安装座、转动设置于所述安装座上的第一链条以及设于所述x轴移动模组的第四驱动机构;所述第一y轴移动模组滑动设置于所述安装座,且与所述第一链条连接,所述第四驱动机构用于驱动所述第一链条转动。
9.根据权利要求8所述的运输机器人,其特征在于:所述第四驱动机构包括传动组件、设于所述x轴移动模组上的第四电机以及均转动设置于所述安装座上的第四齿轮和第五齿轮,所述第一链条套设于所述第四齿轮和第五齿轮上,所述第四电机通过所述传动组件带动所述第四齿轮转动。
10.根据权利要求9所述的运输机器人,其特征在于:所述传动组件包括第六齿轮、第七齿轮、传动轴和第二链条,所述第六齿轮与所述第四电机连接,所述第二链条套设于所述第六齿轮和第七齿轮,所述传动轴的两端分别与所述第七齿轮以及所述第四齿轮。
技术总结
本发明涉及机器人技术领域,特别是涉及一种运输机器人,包括X轴移动模组、Z轴移动模组、第一Y轴移动模组、第二Y轴移动模组以及承载部;Z轴移动模组,设于X轴移动模组上;第一Y轴移动模组,设于Z轴移动模组上;第二Y轴移动模组,设于第一Y轴移动模组上;承载部,设于第一Y轴移动模组上;第二Y轴与承载部驱动连接,以驱动第承载部滑移,承载部靠近X轴移动模组的一端设有缺口。本发明的运输机器人取代了手动的方式,使用自动化的手段,可将笔记本电脑放入老化测试柜或将其从老化测试柜中取出,操作快捷便利、自动化程度高,可大幅提高批量老化测试的工作效率,因此十分值得推广应用。
技术研发人员:刘占飞
受保护的技术使用者:东莞市冠佳电子设备有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!