一种连接机构、输送装置、轨道机构及轨道输送装置的制作方法
本发明涉及轨道输送,尤其是指一种连接机构、输送装置、轨道机构及轨道输送装置。
背景技术:
1、在电子装配,产品组装,医疗设备、精密自动化的生产领域,通过设计和搭建轨道输送机构,作为循环的流水线或者生产线进行使用,能够在提高了生产效率的同时,降低人工成本和占地空间,因此也得到了广泛的应用和推广。现有的环形轨道线通常包括支撑架模块、轨道模块、动力模块及负载单元。支撑架模块用于支撑整个环形线,轨道模块和动力模块用于驱动负载单元在轨道模块上进行运动。
2、现有的环形轨道的动力滚轮和从动滚轮设置在同一轨道,轨道承担了所有的负载,这就导致了当负载单元的重量较大时,难以实现高精度运行,并且轨道所承受的作用力较大,动力滚轮一方面驱动负载单元的运动,同时也要承担较大的负载,如此以来,对轨道及动力滚轮的均会产生较大损伤,并且难以实现高精度运载,从而无法满足高精度和高负载吊装需求。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中的不足,提供一种连接机构、输送装置、轨道机构及轨道输送装置,本发明将导向单元与承重单元分开设计,从而使所述输送装置的整体负载量得到提升,满足高精度和重载的工作场景。通过本发明的连接机构和轨道机构相互配合,能够有效提升所述轨道输送装置的负载,从而能够应用在高精度与重载的工作场景,本发明所要保护的轨道输送装置,结构紧凑、重量轻、负载大、精度高,适用于高精度重型负载自动化吊装作业。
2、为解决上述技术问题,本发明提供了一种连接机构,包括,
3、架体;
4、第一连接组件,其包括设置在所述架体上的转动齿轮;
5、第二连接组件,其包括对称设置在所述架体上的第一支撑板和第二支撑板,所述第一支撑板上沿高度方向依次设有第一导轮和第二导轮,所述第二支撑板上沿高度方向依次设有第三导轮和第四导轮。
6、优选地,所述第一连接组件包括还包括第一限位组件,所述第一限位组件包括第一底座、第一安装柱和第一导向板,所述第一底座上设有第一安装柱,所述第一导向板上设有第一通孔,所述第一安装柱通过所述第一通孔和第一导向板相连,所述第一安装柱和所述第一通孔间隙配合,所述第一导向板上对称设有第一导向块和第二导向块,所述转动齿轮的轴所在的方向和所述第一安装柱平行。
7、优选地,所述第一连接组件还包括第二限位组件,所述第二限位组件包括第二底座、第二安装柱和第二导向板,所述第二底座上设有第二安装柱,所述第二导向板上设有第二通孔,所述第二安装柱通过所述第二通孔和第二导向板相连,所述第二安装柱和所述第二通孔间隙配合,所述第二导向板上对称设有第三导向块和第四导向块。
8、优选地,还包括驱动单元,所述驱动单元和所述转动齿轮相连。
9、本发明还提供了一种输送装置,包括厢体单元以及如前面所述的连接机构,所述厢体单元和所述连接机构相连。
10、优选地,还包括作业机器人,所述作业机器人和所述厢体单元相连。
11、优选地,还包括通信单元及控制面板,所述通信单元设置在所述厢体单元内,所述控制面板和所述厢体单元相连。
12、本发明还提供了一种轨道机构,所述轨道机构用于与如前面所述的连接机构匹配,所述轨道机构包括,
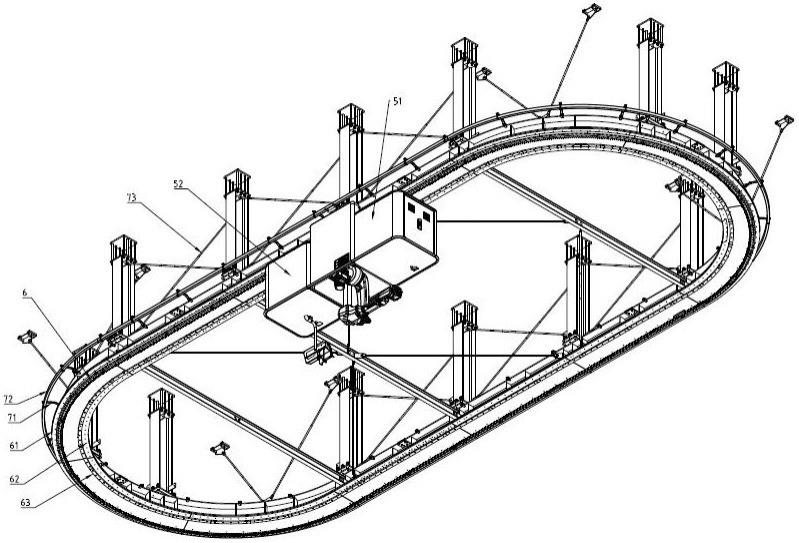
13、框架单元,其包括吊柱组件和横梁组件,所述横梁组件所在的平面和所述吊柱组件的高度方向垂直,所述吊柱组件包括多个吊柱;
14、导向单元,其包括齿条,所述齿条沿所述横梁组件的延伸方向设置,所述齿条和所述连接机构中的转动齿轮啮合;
15、承重单元,其包括沿所述横梁组件延伸方向设置的第一导轨和第二导轨,所述第一导轨和第二导轨对称设置在所述横梁组件两侧,所述第一导轨和所述齿条的延伸方向同向,其中,所述连接机构中所述的第一导轮和第二导轮的轴所在的方向和所述第一导轨的长度方向平行,所述连接机构中所述的第三导轮和第四导轮的轴所在的方向和所述第二导轨的长度方向平行。
16、优选地,所述横梁组件包括多根横梁,多根所述横梁首尾相连,形成闭环。
17、优选地,所述导向单元还包括沿所述横梁组件延伸方向设置的第三导轨,所述第三导轨用于与所述第一限位组件相连,所述第三导轨设置在所述第一导向块和第二导向块之间。
18、优选地,所述第三导轨用于与所述第二限位组件相连,所述第三导轨设置在所述第三导向块和第四导向块之间。
19、优选地,还包括导线单元,所述导线单元包括设置在所述轨道机构的导线支撑架单元,所述导线支撑架单元上设有导线。
20、优选地,还包括支撑单元,所述支撑单元包括多个斜拉杆,相邻的所述吊柱之间设有所述斜拉杆。
21、本发明还提供了一种轨道输送装置,包括如前面所述的输送装置,以及如前面所述的轨道机构,其中,所述输送装置通过如前面所述的连接机构和所述轨道机构相连。
22、本发明的上述技术方案相比现有技术具有以下优点:
23、本发明所述的一种轨道机构,设有框架单元、导向单元及承重单元,当所述轨道机构和所述连接机构配合使用时,所述齿条和所述连接机构中的转动齿轮啮合,从而对所述连接机构的运动进行导向,所述第一导轨设置在所述第一导轮和第二导轮之间,所述第二导轨设置在所述第二导轮和第四导轮之间,从而,所述第一导轮、第三导轮能够起到防止覆倾的作用,所述第二导轮、第四导轮能够对所述第一导轨和第二导轨起到承重作用,所述第二导轮、第四导轮能够对所述第一导轨和第二导轨进行支撑,从而对所述连接机构以及和所述连接机构相连的厢体进行支撑,同时起到承重作用。本发明的轨道机构结构紧凑,将导向单元与承重单元分开设计,从而使所述输送装置的整体负载量得到提升,满足高精度和重载的工作场景。本发明的转动齿轮和齿条能够保证所述连接机构在所述轨道机构的高精度运行。从而使与所述连接机构相连的输送装置也能够实现高精度运行,通过本发明的连接机构和轨道机构相互配合,能够有效提升所述轨道输送装置的负载,从而能够应用在高精度与重载的工作场景,本发明所要保护的轨道输送装置,结构紧凑、重量轻、负载大、精度高,适用于重型负载高精度自动化吊装作业。
技术特征:
1.一种连接机构,其特征在于:包括,
2.根据权利要求1所述的一种连接机构,其特征在于:所述第一连接组件包括还包括第一限位组件,所述第一限位组件包括第一底座、第一安装柱和第一导向板,所述第一底座上设有第一安装柱,所述第一导向板上设有第一通孔,所述第一安装柱通过所述第一通孔和第一导向板相连,所述第一安装柱和所述第一通孔间隙配合,所述第一导向板上对称设有第一导向块和第二导向块,所述转动齿轮的轴所在的方向和所述第一安装柱平行。
3.根据权利要求1所述的一种连接机构,其特征在于:所述第一连接组件还包括第二限位组件,所述第二限位组件包括第二底座、第二安装柱和第二导向板,所述第二底座上设有第二安装柱,所述第二导向板上设有第二通孔,所述第二安装柱通过所述第二通孔和第二导向板相连,所述第二安装柱和所述第二通孔间隙配合,所述第二导向板上对称设有第三导向块和第四导向块。
4.根据权利要求1所述的一种连接机构,其特征在于:还包括驱动单元,所述驱动单元和所述转动齿轮相连。
5.一种输送装置,其特征在于:包括厢体单元以及如权利要求1-4中任意一项所述的连接机构,所述厢体单元和所述连接机构相连。
6.根据权利要求5所述的一种输送装置,其特征在于:还包括作业机器人,所述作业机器人和所述厢体单元相连。
7.根据权利要求5所述的一种输送装置,其特征在于:还包括通信单元及控制面板,所述通信单元设置在所述厢体单元内,所述控制面板和所述厢体单元相连。
8.一种轨道机构,其特征在于:所述轨道机构用于与权利要求1-4中任意一项所述的连接机构匹配,所述轨道机构包括,
9.根据权利要求8所述的一种轨道机构,其特征在于:所述横梁组件包括多根横梁,多根所述横梁首尾相连,形成闭环。
10.根据权利要求8所述的一种轨道机构,其特征在于:所述导向单元还包括沿所述横梁组件延伸方向设置的第三导轨,所述第三导轨用于与所述权利要求2中所述的第一限位组件相连,所述第三导轨设置在所述第一导向块和第二导向块之间。
11.根据权利要求10所述的一种轨道机构,其特征在于:所述第三导轨用于与所述权利要求3中所述的第二限位组件相连,所述第三导轨设置在所述第三导向块和第四导向块之间。
12.根据权利要求8所述的一种轨道机构,其特征在于:还包括导线单元,所述导线单元包括设置在所述轨道机构的导线支撑架单元,所述导线支撑架单元上设有导线。
13.根据权利要求8所述的一种轨道机构,其特征在于:还包括支撑单元,所述支撑单元包括多个斜拉杆,相邻的所述吊柱之间设有所述斜拉杆。
14.一种轨道输送装置,其特征在于:包括如权利要求5-7中任意一项所述的输送装置,以及如权利要求8-13中任意一项所述的轨道机构,所述输送装置通过权利要求1-4中任意一项所述的连接机构和所述轨道机构相连。
技术总结
本发明涉及一种连接机构、输送装置、轨道机构及轨道输送装置,包括,架体;第一连接组件,其包括设置在所述架体上的转动齿轮;第二连接组件,其包括对称设置在所述架体上的第一支撑板和第二支撑板,所述第一支撑板上沿高度方向依次设有第一导轮和第二导轮,所述第二支撑板上沿高度方向依次设有第三导轮和第四导轮;所述轨道机构包括框架单元、导向单元、承重单元。本发明的连接机构和轨道机构相互配合,能够有效提升所述轨道输送装置的负载,从而能够应用在高精度与重载的工作场景,本发明所要保护的轨道输送装置,结构紧凑、重量轻、负载大、精度高,适用于重型负载高精度自动化吊装作业。
技术研发人员:甄彬,朱方玉
受保护的技术使用者:威尔克莱特(苏州)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!