一种基于自动化码头门座式起重机作业方法、装置及存储介质与流程
本发明涉及港口作业领域,更具体地,涉及一种基于自动化码头门座式起重机作业方法、装置及存储介质。
背景技术:
1、自动化码头是目前各集装箱码头建设及改造的新趋势、新潮流;目前在建或已在建的自动化集装箱码头多达30个,基本都是已岸边集装箱起重机为主的自动化码头,门座式起重机同样作为面对船舶作业的第一线设备,因其设计复杂工况多变而未广泛运用到自动化码头,但门座式起重机具有投入成本低、场地利用率高、操作灵活、高效节能等明显优点,将门座式起重机加入自动化码头的建设队伍内又变得刻不容缓。
2、目前已建或在建的自动化码头中,尚未将门座式起重机加入港口机械行列,但当前对门座式起重机在自动化码头的研究还是有迹可循,如门座式起重机在自动化码头人工智能理货、门座式起重机抓斗自动防摇、门座式起重机与门座式起重机间的协同等;而对于门座式起重机的多设备协同作业数据处理方法,在当前研究领域还少,驳船停靠时间、运营成本、数据处理逻辑的安全性、准确性还有待提升。
技术实现思路
1、本发明旨在克服上述现有技术的至少一种缺陷,提供一种基于自动化码头门座式起重机作业方法、装置及存储介质,用于解决码头门座式起重机协同作业精准控制及智能化的问题。
2、本发明提供了一种基于自动化码头门座式起重机作业方法,本发明主要依据自动化集装箱码头门座式起重机在本地操作模式以及水平运输机械智能导引车(以下简称igv)自动作业模式的各种工况进行研究,还包括可编程逻辑控制器(以下简称plc)、门座式起重机设备控制系统(以下简称ecs)、智能理货(以下简称ocr)以及码头管理系统(以下简称tos)进行数据分析。
3、所述方法包括:
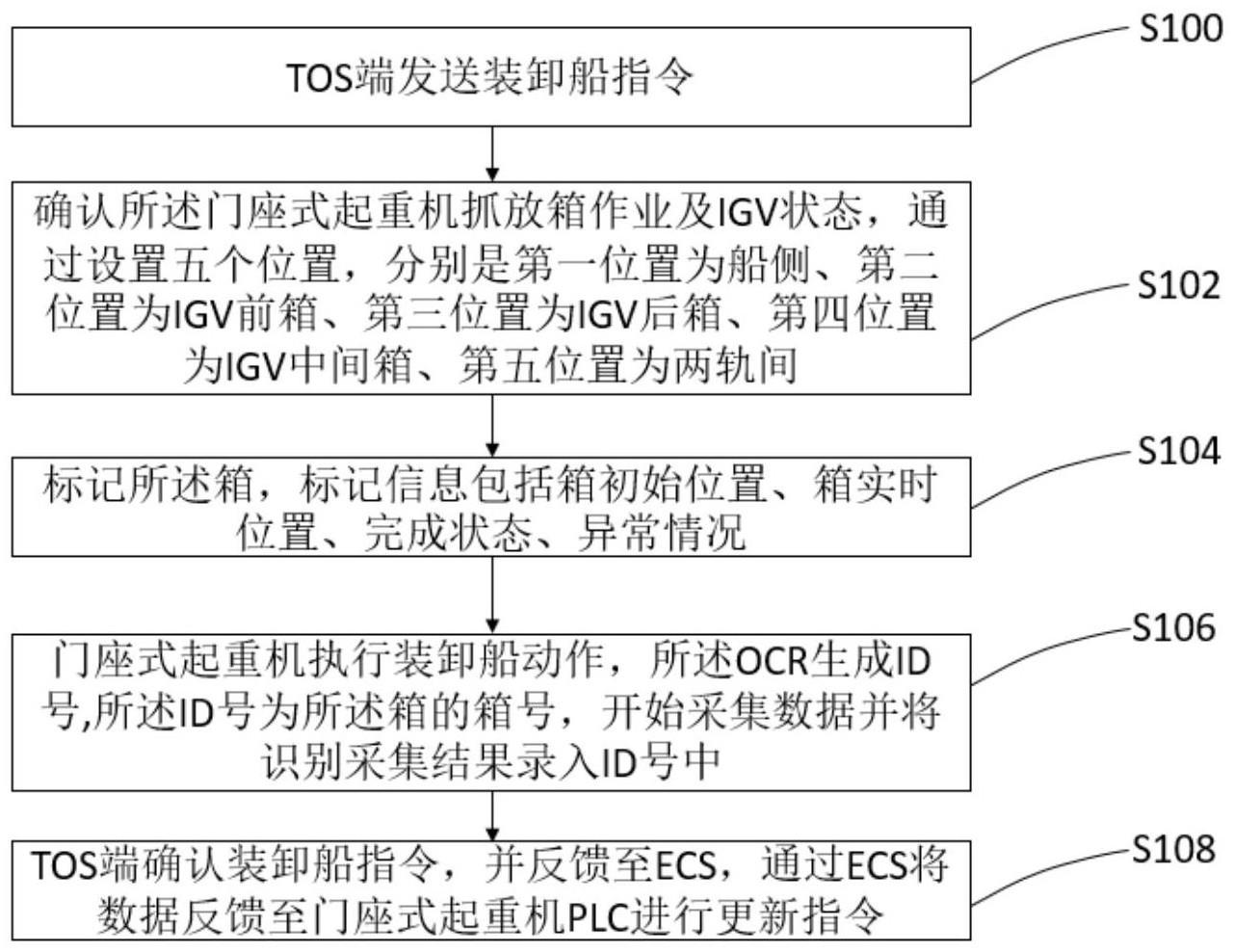
4、tos端发送装卸船指令;
5、确认所述门座式起重机抓放箱作业及igv状态,通过设置五个位置,分别是第一位置为船侧、第二位置为igv前箱、第三位置为igv后箱、第四位置为igv中间箱、第五位置为两轨间;
6、标记所述箱,标记信息包括箱初始位置、箱实时位置、完成状态、异常情况;
7、门座式起重机执行装卸船动作,所述ocr生成id号,所述id号为所述箱的箱号,开始采集数据并将识别采集结果录入id号中;
8、tos端确认装卸船指令,并反馈至ecs,通过ecs将数据反馈至门座式起重机plc进行更新指令。
9、所述方法还包括卸船作业:
10、门座式起重机执行抓箱作业;
11、当处于第一位置和第五位置时,进行抓箱;
12、门座式起重机ocr生成id号,开始采集数据并将识别采集结果录入id号;
13、门座式起重机plc读取ocr异常情况,判断是否解锁igv;
14、完成解锁,门座式起重机执行放箱作业。
15、所述方法还包括卸船作业:
16、增加一个虚拟箱,所述虚拟箱的箱号由id号和箱尺寸组成;
17、在第二位置、第三位置、第四位置抓箱,所述虚拟箱对应的完成状态为进度0;
18、在第二位置、第三位置、第四位置执行解锁igv,所述虚拟箱对应的完成状态为进度1;
19、所述虚拟箱与igv分离,起升到安全高度,所述虚拟箱对应的完成状态为进度2;
20、在第一位置、第五位置完成解锁,所述虚拟箱对应的完成状态为进度y;
21、停止根据ecs反馈更新其标记。
22、进一步,装船作业中所述igv驻车作业位置;
23、门座式起重机ocr生成id号,开始采集数据并将识别采集结果录入id号;
24、门座式起重机plc读取ocr异常结果,判断是否锁定igv;
25、完成锁定,门座式起重机执行抓箱作业。
26、进一步,所述装船作业还包括:
27、锁定所述igv后,所述箱对应的完成状态为进度0;
28、在第二位置、第三位置、第四位置抓箱,所述箱对应的完成状态为进度1;
29、所述箱与igv分离,起升到安全高度,所述箱对应的完成状态为进度2;
30、在第一位置、第五位置完成解锁,所述箱对应的完成状态为进度y;
31、停止根据ecs反馈更新其标记。
32、进一步,所述异常情况包括异常a、异常b、异常c;
33、所述异常a为位置冲突,通过将所述冲突箱调整至新的位置解决异常,ecs向tos反馈箱的实时状态;
34、所述异常b为位置错误,卸船时通过将所述位置错误箱调整至新的位置解决异常,装船时通过还原箱位置解决异常,ecs向tos反馈箱的实时状态;
35、所述异常c为任务退卸,通过还原箱位置解决异常。
36、本发明还包括一种基于自动化码头门座式起重机作业装置,包括司机驾驶室、大臂、吊具,所述装置包括:
37、门座式起重机共安装6台球机,分别是第一land、第二land、第三land、第一mid、第二mid、第一seaside,其中球机第三land安装在门座式起重机陆侧距离地面6-7米位置,用于相邻门座式起重机借用,球机第一land、第二land安装在门座式起重机陆侧下层两侧距离地面4米位置,球机第二mid安装于司机驾驶室下方位置,球机第一seaside安装于海侧下层作业侧距离地面4米位置,球机第一mid安装于门座式起重机跨距内中间距离地面5-7米位置。
38、进一步,还包括识别装置,所述识别装置用于识别球机采集的图像信息,识别结果包括箱号、箱型。
39、进一步,还包括多个位置定位器,所述位置定位器安装在门座式起重机大臂和吊具上。
40、本发明还包括一种计算机可读存储介质,所述计算机可读存储介质存储用于执行的程序代码,所述程序代码包括用于实现一种基于自动化码头门座式起重机作业方法。
41、与现有技术相比,本发明的有益效果有:
42、1、通过门座式起重机plc、ecs、ocr系统、tos系统几个模块之间的信息传递,新增了一定的逻辑验证和控制机制,增加了信息传递的严谨性、合理性,保证在作业过充中遇到异常情况能够立即发现,避免作业出现人为失误的可能,加强了作业的安全性和可控性。
43、2、针对ocr智能理货方面,放置五个球机,对门座式起重机抓放箱动作进行抓拍,获取5个位置的图片并进行识别,对装卸箱作业中抓放箱和锁定解锁提供了更加精确的信息,使协同作业更加精细的控制。
44、3、通过标记箱的信息,实时掌握作业过程的状态,对异常消息可及时的发现并处理,整体流程得到闭环控制。
技术特征:
1.一种基于自动化码头门座式起重机作业方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括卸船作业:
3.根据权利要求2所述的方法,其特征在于,所述卸船作业还包括:
4.根据权利要求1所述的方法,其特征在于,还包括装船作业:
5.根据权利要求4所述的方法,其特征在于,所述装船作业还包括:
6.根据权利要求1所述的方法,其特征在于,所述异常情况包括异常a、异常b、异常c;所述异常a为位置冲突,通过将所述冲突箱调整至新的位置解决异常,ecs向tos反馈箱的实时状态;
7.一种基于自动化码头门座式起重机作业装置,包括司机驾驶室、大臂、吊具,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,还包括识别装置,所述识别装置用于识别球机采集的图像信息,识别结果包括箱号、箱型。
9.根据权利要求7所述的装置,其特征在于,还包括多个位置定位器,所述位置定位器安装在门座式起重机大臂和吊具上。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储用于执行的程序代码,所述程序代码包括用于实现权利要求1-6中任一项所述的方法。
技术总结
本发明涉及港口作业领域,更具体地,涉及一种基于自动化码头门座式起重机作业方法、装置及存储介质,用于解决码头门座式起重机协同作业精准控制及智能化的问题。方案包括:TOS端发送装卸船指令;确认门座式起重机抓放箱作业及IGV状态,通过设置五个位置,分别是第一位置为船侧、第二位置为IGV前箱、第三位置为IGV后箱、第四位置为IGV中间箱、第五位置为两轨间;标记箱,标记信息包括箱初始位置、箱实时位置、完成状态、异常情况;门座式起重机执行装卸船动作,OCR生成ID号,所述ID号为所述箱的箱号,开始采集数据并将识别采集结果录入ID号中;TOS端确认装卸船指令,并反馈至ECS,通过ECS将数据反馈至门座式起重机PLC进行更新指令。
技术研发人员:陈化贵,何业科,陈宏伟,朱少兵,郑伟鸿,黄争,张学林,刘凯,甘继宝,饶智敏,黄光灿,孔德辉
受保护的技术使用者:广州港股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!