用于运输托盘和/或格子箱的自主行进的运输系统和用于运行这种自主行进的运输系统的方法与流程
本发明涉及一种自主行进的运输系统,特别是一种自主行进的起重车,特别是呈用于运输托盘和/或格子箱的叉车的形式,并且涉及一种用于运行这种自主行进的运输系统的方法。
背景技术:
1、具有货物的托盘或具有货物的格子箱在生产或物流中以节省空间的方式彼此排列成一行。为此,托盘或格子箱被推入空闲的空间(空闲的停放区域)中。最近,这也借助于自主行进的车辆(agv-自动导引车)来自动地进行。为了确保不会伤害处于空闲的空间中的人员,托盘或格子箱彼此这样地放置,即,使得还存在对于人员的逃生路线。通常,在放置的托盘或格子箱旁边空出完整的空间。于是该存储空间无法继续使用。
技术实现思路
1、因此,本发明的目的是创建一种用于运输托盘和/或格子箱的自主行进的运输系统,通过该运输系统可以尽可能高效地使用现有的存储空间。
2、该目的通过独立权利要求1的自主行进的运输系统来实现。权利要求15描述一种用于运行这种自动行进的运输系统的方法。权利要求2至14给出了根据本发明的自主行进的运输系统的改进形式。
3、根据本发明的自主行进的运输系统尤其用于运输托盘和/或格子箱。运输系统包括用于接收这种托盘和/或格子箱的接收装置。运输系统还包括驱动单元和控制装置。控制装置包括数据处理单元和具有第一传感器单元的障碍物识别装置。障碍物识别装置设计为通过第一传感器单元产生监控场,以通过监控场对空闲的停放区域进行障碍物检查,该空闲的停放区域用于托盘和/或格子箱,并且位于其他的托盘和/或格子箱之间。控制装置设计为用于操控驱动单元,使得运输系统(在没有障碍物的情况下)采取停放运行模式(abstellbetriebsmodus),并将托盘和/或格子箱行进到空闲的停放区域中以停放。在第一替代方案中,障碍物识别装置在停放运行模式中设计为用于在驶过空闲的停放区域期间,至少直至将托盘和/或格子箱停放在空闲的停放区域上,将监控场限制于空闲的停放区域,或停用监控场,或不输出障碍物识别信号。这通过对应地操控第一传感器单元来进行。在另一替代方案中,数据处理单元在停放运行模式中设计为用于在驶过空闲的停放区域期间,至少直至将托盘和/或格子箱停放在空闲的停放区域上,忽略障碍物识别装置的障碍物识别信号。
4、自主行进的运输系统特别是自行驶的且自导航的车辆。运输系统优选地设计为用于自动接收和卸载负载(即,例如在此提到的托盘和格子箱)。运输系统例如可以是地面输送车辆或起重车,特别是呈叉车的形式。
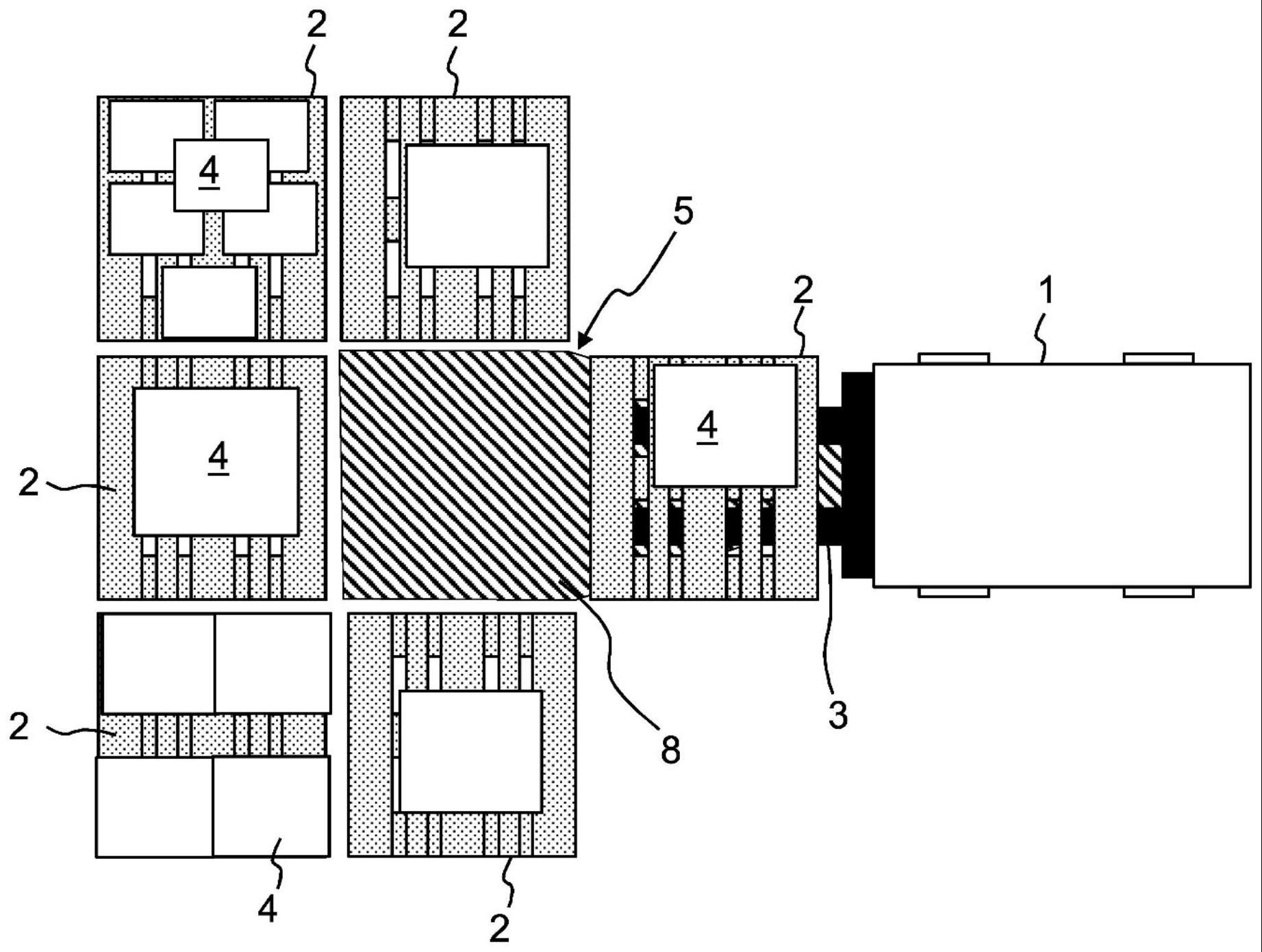
5、特别有利的是:根据本发明的自主行进的运输系统首先通过监控场检测在用于托盘和/或格子箱的空闲的停放区域上检测是否存在障碍物。如果在空闲的停放区域没有障碍物(例如人员或物体),则运输系统切换到停放运行模式中。在该停放运行模式中,例如监控场可以被(持续地)限制于空闲的停放区域上进而被缩小。在该情况下,监控场不检测相邻的托盘和/或格子箱,这就是没有输出障碍物识别信号的原因。替代地,可以停用监控场。在此,可以监控行进过的距离,以确保运输系统不会驶出空闲区域(die freigemessene)。替代地,尽管启用的监控场不输出障碍物识别信号,或者忽略这种障碍物识别信号并延续行进,这是毫无问题是可行的,因为在驶入空闲的停放区域中之前,已经对该停放区域进行了障碍物检查。因此,有两种措施允许更高效地利用存储空间。一方面,紧邻驶入空闲的停放区域之前通过监控场对空闲的停放区域进行扫描,并且另一方面需要确保不会触发障碍物识别装置的安全反应,这会中断停放过程,因此托盘和/或格子箱可以彼此非常紧密地停放。表述“紧邻”尤其意味着:在驶过之前小于10秒、小于5秒或小于3秒对空闲的停放区域进行障碍物检查,并且由此确保没有人员还移动到其中。更优选地,其他传感器单元可以保持启用,其他传感器也设计为用于检测障碍物,并且不用于监控空闲的停放区域,以便可以由此检测正接近自主行进的运输系统并且可能试图侧向经过自动行进的运输系统到达空闲的停放区域中的人员。在这种检测时,自主行进的运输系统优选地停住或者再次离开空闲的停放区域。
6、在一个有利的实施方式中,控制装置设计为用于控制驱动单元,使得运输系统在停放运行模式下仅在停放区域的空闲区域上行进。由此,在障碍物识别装置被停用时也防止碰撞。
7、在另一个有利的实施方式中,数据处理单元设计为用于操控障碍物识别装置,使得该障碍物识别装置将它的监控场限制于空闲的停放区域的还没有被驶过的部分上。由此,持续地适配监控场。需要强调的是:第一传感器单元产生障碍物识别装置的的监控场,该监控场用于监控空闲的停放区域。
8、在另一有利的实施方式中,运输系统包括检测器单元(gebereinheit)。该检测器单元设计为用于在停放运行模式中持续地确定驶过的路线,其中障碍物识别装置设计为用于根据所确定的路线持续地(在空闲的停放区域的未被驶过的部分上)限制监控场。监控场尤其会因所驶过的路线的距离而减小。
9、在另一有利的实施方式中,检测器单元设置在驱动单元的驱动轴处。由此可以尤其精确地确定所经过的路线。
10、替代地或额外地,驶过的路线也可以经由另一定位系统来确定,例如通过lidar(光检测和测距)光学地确定,或借通过使用uwb、wlan和/或umts的rtls(实时定位系统)的无线通讯来确定。
11、在另一有利的实施方式中,障碍物识别装置设计为用于通过第一传感器单元的反射角(strahlwinkel)的调节来限制监控场。原则上可以考虑的是:倾斜和/或旋转整个第一传感器单元以改变角位置。还可行的是:调节第一传感器单元内的反射件(spiegel),使得监控场限制缩小的区域(空闲的停放区域的尚未被驶过的部分)。
12、在另一有利的实施方式中,障碍物识别装置或数据处理单元设计为用于通过隐去(ausblenden)特定区域来限制监控场。这例如可以通过以下方式进行:即仅考虑特定持续时间段内发射的用于检测障碍物的光脉冲的反射。
13、在另一有利的实施方式中,第一传感器单元是光学传感器、声学传感器(例如超声波)或电磁传感器(例如雷达)。光学传感器优选地是tof(飞行时间)传感器和/或激光扫描仪。由此,可以以高分辨率对空闲的停放区域进行障碍物检查。
14、在另一有利的实施方式中,接收装置包括叉。在该情况下,运输系统是叉车。
15、在另一有利实施方式中,第一传感器单元设置在至少一个叉的端部。因此,可以特别容易地对空闲的停放区域进行障碍物检查。叉可以相应地是中空的,以容纳第一传感器单元和数据处理单元之间的连接电缆。
16、在另一有利的实施方式中,第一传感器单元设置在运输系统的下部区域。特别地,第一传感器设置在运输系统的侧部,在该侧部上还存在接收装置。控制装置设计为用于操控接收装置,使得所述接收装置抬升托盘和/或格子盒,使得第一传感器单元的监控场在托盘和/或格子盒下方在空闲的停放区域的方向上延伸,以便对该停放区域进行障碍物检查。该抬升优选地进在驶过空闲的停放区域之前进行。为了驶过空闲的停放区域,托盘和/或格子箱可以已经再次下降(例如,在使用停用的监控场的替代方案的情况下)。
17、在另一有利的实施方式中,障碍物识别装置包括第二传感器单元。第一传感器单元设置在运输系统的后侧,并且第二传感器单元设置在运输系统的前侧。由此,不仅在向前行驶时(这里使用第二传感器单元),而且在向后行驶时(车里使用第一传感器单元),都可以识别相应的行驶方向上的障碍物。
18、在另一有利的实施方式中,驱动单元是电驱动单元。控制装置在停放运行模式中设计为用于监控驱动单元的电流消耗。对于驱动单元的电流消耗超过阈值的情况,控制装置设计为用于以如下方式操控驱动单元:驱动单元停止运输系统或使得运输系统驶出空闲的停放区域。电流消耗可以是可能的碰撞的指示。原则上可以考虑的是:控制装置根据所接收的托盘和/或格子箱的重量来适配阈值。对于较重的托盘和/或格子箱而言,阈值高于较轻的托盘和/或格子箱的阈值。由此引入额外的安全因素。
19、在另一有利的实施方式中,控制装置设计为用于相对于自主行进的运输系统在其他情况下的移动的速度降低自主行进的运输系统驶过空闲的停放区域的速度。优先地,自主行进的运输系统驶过空闲的停放区域的速度小于1m/s、小于50cm/s或小于30cm/s。
20、根据本发明的方法用于运行用于运输托盘和/或格子箱的自主行进的运输系统。在第一方法步骤中,产生监控场。这优选地通过障碍物识别装置的第一传感器单元进行。通过该监控场,对空闲的停放区域进行障碍物(人员和/或物体)检查,该空闲的停放区用于待停放的托盘和/或格子箱(运输系统携带该托盘和/或格子箱),并且位于其他的托盘和/或格子箱之间。在第二方法步骤中,操控驱动单元使得运输系统在没有障碍物(监控场没有在空闲的停放区域中检测到障碍物)的情况下采取停放运行模式,并将托盘和/或格子箱行进到空闲的停放区域中以停放。该操控优选地通过控制装置来进行。在第三方法步骤中,监控场(持续)被限制于空闲的停放区域。替代地,将监控场停用。替代地,禁止输出障碍物识别信号(尤其传输给数据处理单元)。替代地,在运输系统处于停放运行模式期间,(通过数据处理单元)忽略这种障碍物识别信号。
- 还没有人留言评论。精彩留言会获得点赞!