一种装船机自适应船舶浮动装置及工作方法与流程
本发明涉及装船机,尤其涉及一种装船机自适应船舶浮动装置及工作方法。
背景技术:
1、装船机作为散料码头装船作业线的终端设备,用于将装船作业线上所传输的物料由地面皮带经机上皮带、抛料装置输送至船舱内。在装船作业过程中,由于潮汐、浪涌、船舶的装料程度等因素,会使船舶产生或上或下的浮动,常规装船机通过操作人员手动控制臂架俯仰的角度,来调节装船机臂架距船舶舱口的安全距离以及臂架端部距船舱内物料落料距离,预防装船机臂架同船舶舱口产生碰撞风险的同时将物料落料距离控制为一个较小值,避免由于物料落料距离过大导致块状、球状物料下落后粉碎,造成物料质量的下降。由于人工操作的局限性,存在一定的碰撞安全隐患,同时可能出现由于物料落料距离过大造成块状、球状物料下落后粉碎,物料质量的下降等问题。
技术实现思路
1、根据现有技术存在的问题,本发明公开了一种装船机自适应船舶浮动装置,数据检测单元,包括设置在装船机臂架端部左右两侧的雷达料位计以及设置于臂架绞点位置的倾角仪装置,所述雷达料位计实时检测臂架端部的抛料装置至船舶上的接料漏斗上沿的距离,所述倾角仪装置用于检测臂架的俯仰角度信息;
2、驱动控制单元,包括设置于装船机电气室的马达启动器和设置于臂架绞点附近的俯仰液压驱动油缸,所述马达启动器用于驱动俯仰液压驱动油缸的泵电机当泵电机及油缸伸出电磁阀同时动作时,俯仰液压驱动油缸将向外伸出进而驱动臂架上仰,当泵电机及油缸缩回电磁阀同时动作时,俯仰液压驱动油缸将向内缩回,进而驱动臂架下俯;
3、主plc控制单元,设置在装船机电气室、控制马达启动器驱动油缸泵电机,并以相同的方式同时控制驱动油缸的电磁阀工作,从而调控臂架机构的下俯、上仰动作。
4、所述主plc控制单元包括plc模块、通讯模块、di模块、do模块和以太网交换机,所述通讯模块用于plc模块的通讯接口、支持tcp/ip以太网通讯协议;所述di模块用于采集驱动控制单元中俯仰液压驱动油缸的限位信号;所述do模块用于控制驱动控制单元中俯仰液压驱动油缸的马达启动器和电磁阀;所述以太网交换机用于接收数据检测单元中雷达料位计及倾角仪装置的检测数据并将接收到的信息传送至plc模块。
5、在臂架端部左右两侧各安装一个雷达料位计、从而构成冗余检测方案,所述雷达料位计采用tcp/ip以太网通讯协议进行传输;所述倾角仪装置采用tcp/ip以太网通讯协议进行数据传输。
6、所述俯仰液压驱动油缸包括有泵电机、油缸伸出电磁阀、油缸缩回电磁阀以及油缸伸出缩回行程限位开关,所述油缸伸出缩回行程限位开关用于油缸运行超程保护检测。
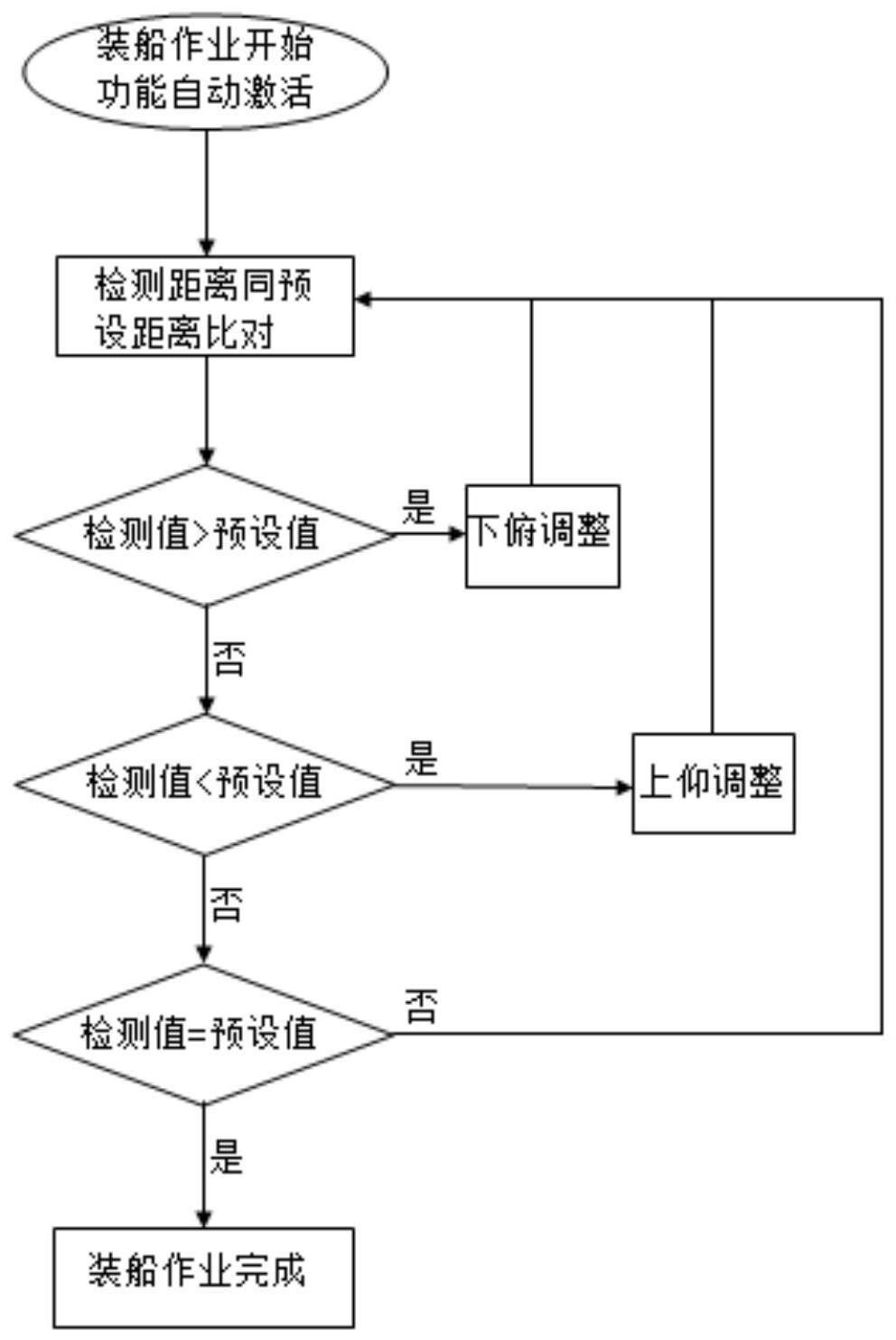
7、一种装船机自适应船舶浮动装置的工作方法,具体包括如下步骤:
8、当装船机臂架实际检测俯仰角度以及预设调整距离所对应的俯仰角度均大于水平角度,且s检测>s预设时,臂架需进行下俯调整:
9、ω下俯=ω检测-arcsin(sinω检测-(s检测-s预设)/l);
10、当装船机臂架实际检测俯仰角度以及预设调整距离所对应的俯仰角度均大于水平角度,且s检测<s预设时,臂架需进行上仰调整;
11、ω上仰=arcsin((s预设-s检测)/l+sinω检测)-ω检测;
12、当装船机臂架实际检测俯仰角度以及预设调整距离所对应的俯仰角度均小于水平角度,且s检测>s预设时,臂架需进行下俯调整;
13、ω下俯=arcsin((s检测-s预设)/l+sinω检测)-ω检测;
14、当装船机臂架实际检测俯仰角度以及预设调整距离所对应的俯仰角度均小于水平角度,且s检测<s预设时,臂架需进行上仰调整;
15、ω上仰=ω检测-arcsin(sinω检测-(s预设-s检测)/l);
16、当装船机臂架实际检测俯仰角度等于水平角度,且s检测>s预设时,臂架需进行下俯调整;
17、ω下俯=arcsin((s检测-s预设)/l);
18、当装船机臂架实际检测俯仰角度等于水平角度,s检测<s预设时,臂架需进行上仰调整;
19、ω上仰=arcsin(s预设-s检测)/l);
20、当装船机臂架实际检测俯仰角度大于水平角度,预设调整距离所对应的俯仰角度小于水平角度,且s检测>s预设时,臂架需进行下俯调整;
21、ω下俯=arcsin((s检测-s预设)/l-sinω检测)+ω检测;
22、当装船机臂架实际检测俯仰角度小于水平角度,预设调整距离所对应的俯仰角度大于水平角度,且s检测<s预设时,臂架需进行上仰调整;
23、ω上仰=arcsin(s预设-s检测)/l-sinω检测)+ω检测;
24、其中:s检测为臂架端部的抛料装置至船舶上的接料漏斗上沿的检测距离值,s预设为臂架端部的抛料装置至船舶上的接料漏斗上沿的预设距离值,ω下俯为臂架下俯调整角度,ω上仰为臂架上仰调整角度,ω检测为自适应调整之前测距时的臂架俯仰角度,l为雷达料位计安装点据臂架绞点的距离。
25、由于采用了上述技术方案,本发明提供的一种装船机自适应船舶浮动装置及工作方法,其中该装置可实现装船机在装船作业过程对船舶上下浮动进行自动调节、自动适应的功能,从而预防装船机臂架同船舶舱口产生碰撞风险,并避免由于物料落料距离过大导致块状、球状物料下落后粉碎,造成物料质量的下降。
技术特征:
1.一种装船机自适应船舶浮动装置,其特征在于包括:
2.根据权利要求1所述的一种装船机自适应船舶浮动装置,其特征在于:所述主plc控制单元包括plc模块、通讯模块、di模块、do模块和以太网交换机,所述通讯模块用于plc模块的通讯接口、支持tcp/ip以太网通讯协议;所述di模块用于采集驱动控制单元中俯仰液压驱动油缸的限位信号;所述do模块用于控制驱动控制单元中俯仰液压驱动油缸的马达启动器和电磁阀;所述以太网交换机用于接收数据检测单元中雷达料位计及倾角仪装置的检测数据并将接收到的信息传送至plc模块。
3.根据权利要求1所述的一种装船机自适应船舶浮动装置,其特征在于:在臂架端部左右两侧各安装一个雷达料位计、从而构成冗余检测方案,所述雷达料位计采用tcp/ip以太网通讯协议进行传输;所述倾角仪装置采用tcp/ip以太网通讯协议进行数据传输。
4.根据权利要求1所述的一种装船机自适应船舶浮动装置,其特征在于:所述俯仰液压驱动油缸包括有泵电机、油缸伸出电磁阀、油缸缩回电磁阀以及油缸伸出缩回行程限位开关,所述油缸伸出缩回行程限位开关用于油缸运行超程保护检测。
5.一种如权利要求1至4任意一项所述的一种装船机自适应船舶浮动装置的工作方法,具体包括如下步骤:
技术总结
本发明公开了一种装船机自适应船舶浮动装置及工作方法,其中装置包括:PLC控制单元、数据检测单元和驱动控制单元。所述数据检测单元,包括设置在装船机臂架端部左右两侧的雷达料位计以及设置于臂架绞点位置的倾角仪装置,所述驱动控制单元,包括设置于装船机电气室的马达启动器和设置于臂架绞点附近的俯仰液压驱动油缸,所述主PLC控制单元,设置在装船机电气室、控制马达启动器驱动油缸泵电机,并以相同的方式同时控制驱动油缸的电磁阀工作,从而调控臂架机构的下俯、上仰动作。本发明公开的技术方案可实现装船机在装船作业过程对船舶上下浮动进行自动调节、自动适应的功能,从而预防装船机臂架同船舶舱口产生碰撞风险。
技术研发人员:高世超,严如意,徐鹏,张加申,孙波,张昊,冯聪
受保护的技术使用者:大连华锐重工集团股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!