一种用于防摇控制的重物等效摆长检测方法与流程
本发明涉及防摇控制,更具体的说是涉及一种用于防摇控制的重物等效摆长检测方法。
背景技术:
1、目前,为了提高起重机的装卸效率和安全性,起重机防摇控制技术已经成为抑制重物在大小车运行方向上摇摆的关键技术,起重机防摇控制技术基于单摆控制原理,起重机实际作业过程中都需要大车、小车和起升机构联动实现防摇,即通过改变摆长防摇,不可避免要实时检测等效摆长这一关键变量,传统的起重机摆长检测方法采用绝对值编码器或者增量型编码器检测起升卷筒(即摆动的支点)到重物之间钢丝绳的长度,将这个长度作为摆长用于防摇控制算法。
2、但是,传统检测方法得到的等效摆长对于普通的单梁桥式起重机比较准确,对于港口集装箱龙门吊等复杂的起重机,通常使用吊具来吊集装箱,吊具体积较大,由起升卷筒出来的多根钢丝绳分别与分散在吊具四个角的滑轮进行连接,在这种结构形式下传统检测方法得到的等效摆长,将与防摇控制算法实际需要的等效摆长存在很大偏差,大大降低了抑制重物摇摆的效果;另外,为了节约成本,或受制于结构尺寸和外部环境因素,起升机构没有装配编码器,使得实时检测等效摆长变得更加困难。
3、因此,如何精准实时检测起重机所吊重物的等效摆长是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种用于防摇控制的重物等效摆长检测方法,解决了现有检测方法无法精准实时检测起重机所吊重物等效摆长的问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种用于防摇控制的重物等效摆长检测方法,包括:
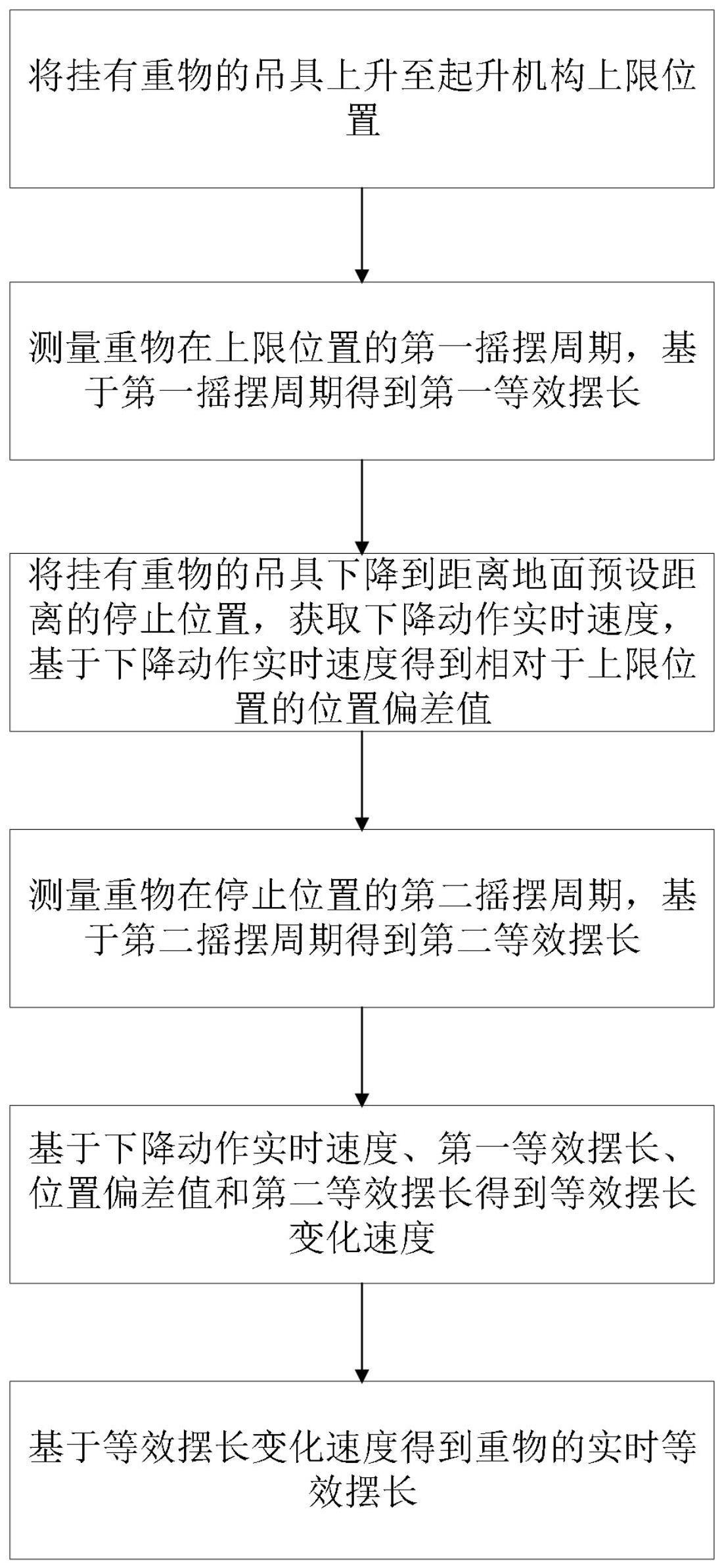
4、将挂有重物的吊具上升至起升机构上限位置;
5、测量所述重物在所述上限位置的第一摇摆周期,基于所述第一摇摆周期得到第一等效摆长;
6、将所述挂有重物的吊具下降到距离地面预设距离的停止位置,获取下降动作实时速度,基于所述下降动作实时速度得到相对于所述上限位置的位置偏差值;
7、测量所述重物在所述停止位置的第二摇摆周期,基于所述第二摇摆周期得到第二等效摆长;
8、基于所述下降动作实时速度、所述第一等效摆长、所述位置偏差值和所述第二等效摆长得到等效摆长变化速度;
9、基于所述等效摆长变化速度得到所述重物的实时等效摆长。
10、优选的,将挂有重物的吊具上升至起升机构上限位置,具体包括:
11、通过起升变频器控制起升电机正转,所述起升电机带动减速机转动,减速机带动起升卷筒转动,所述起升卷筒通过所述钢丝绳带动所述吊具上升,所述起升变频器收到上限位置信号后控制所述起升电机停机。
12、优选的,将所述挂有重物的吊具下降到距离地面预设距离的停止位置,具体包括:
13、通过所述起升变频器控制所述起升电机反转,所述起升电机带动所述减速机转动,所述减速机带动所述起升卷筒转动,所述起升卷筒通过所述钢丝绳带动所述吊具下降,下降到距离地面预设距离的停止位置为止。
14、优选的,所述位置偏差值用h表示,计算公式如下:
15、h=∫(v)dt,其中,v表示下降动作实时速度。
16、优选的,所述下降动作实时速度v与所述起升变频器控制起升电机实时运行频率fcmd成正比关系,转换公式如下:
17、
18、其中,fnorm表示起升电机的额定频率,vnorm表示起升机构对应起升电机额定频率的起升速度,fcmd表示起升变频器控制起升电机实时运行频率。
19、优选的,所述等效摆长变化速度v1计算公式如下:
20、其中,l1表示第一等效摆长,l2表示第二等效摆长。
21、优选的,基于所述第一摇摆周期得到第一等效摆长和基于所述第二摇摆周期得到第二等效摆长,具体包括:
22、基于摇摆周期得到等效摆长的计算公式为:
23、其中li表示第i等效摆长,ti表示第i摇摆周期,g表示重力加速度,取值为9.8,π表示圆周率,取值为3.14。
24、优选的,所述第一摇摆周期和所述第二摇摆周期是指所述重物分别在不同位置时,从左边最高点摆到右边最高点,再从右边最高点摆回到左边最高点过程所花费的时间。
25、优选的,所述实时等效摆长用ls表示,计算公式如下:
26、
27、优选的,所述起升机构上升,fcmd取负值,实时等效摆长ls变小;所述起升机构下降,fcmd取正值,实时等效摆长ls变大。
28、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种用于防摇控制的重物等效摆长检测方法,根据起重机起升机构上升或下降的实时速度折算成等效摆长在上升或下降的变化速度,然后对变化速度进行积分运算,进而得到准确的实时等效摆长;本发明检测方法不需要增加外部传感器,利用起重机已有的电控系统即可获取起重机在大车或小车方向进行防摇控制时重物的等效摆长,操作过程简单,实用性强。
技术特征:
1.一种用于防摇控制的重物等效摆长检测方法,其特征在于,包括:
2.根据权利要求1所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,将挂有重物的吊具上升至起升机构上限位置,具体包括:
3.根据权利要求2所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,将所述挂有重物的吊具下降到距离地面预设距离的停止位置,具体包括:
4.根据权利要求3所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述位置偏差值用h表示,计算公式如下:
5.根据权利要求4所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述下降动作实时速度v与所述起升变频器控制起升电机实时运行频率fcmd成正比关系,转换公式如下:
6.根据权利要求5所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述等效摆长变化速度v1计算公式如下:
7.根据权利要求6所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,基于所述第一摇摆周期得到第一等效摆长和基于所述第二摇摆周期得到第二等效摆长,具体包括:
8.根据权利要求7所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述第一摇摆周期和所述第二摇摆周期是指所述重物分别在不同位置时,从左边最高点摆到右边最高点,再从右边最高点摆回到左边最高点过程所花费的时间。
9.根据权利要求7所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述实时等效摆长用ls表示,计算公式如下:
10.根据权利要求9所述的一种用于防摇控制的重物等效摆长检测方法,其特征在于,所述起升机构上升,fcmd取负值,实时等效摆长ls变小;所述起升机构下降,fcmd取正值,实时等效摆长ls变大。
技术总结
本发明公开了一种用于防摇控制的重物等效摆长检测方法,包括:将挂有重物的吊具上升至起升机构上限位置;测量重物在上限位置的第一摇摆周期,基于第一摇摆周期得到第一等效摆长;将挂有重物的吊具下降到距离地面预设距离的停止位置,获取并基于下降动作实时速度得到相对于上限位置的位置偏差值;测量重物在停止位置的第二摇摆周期,基于第二摇摆周期得到第二等效摆长;基于下降动作实时速度、第一等效摆长、位置偏差值和第二等效摆长得到等效摆长变化速度;基于等效摆长变化速度得到重物的实时等效摆长。解决了现有检测方法无法精准实时检测起重机所吊重物等效摆长的问题。
技术研发人员:曾国庆,谢鸣,毛容芳,周景
受保护的技术使用者:武汉港迪技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!