焊接车的制作方法
本发明涉及一种焊接车。
背景技术:
1、焊接车是重要的管道施工设备。在石油、天然气、化工、水利等管网建设中,焊接车用于管道焊接、吊载行走、电站移动等工作,也可作为一般起重机使用,例如用于装卸、吊运、堆垛等工作。
2、在管道施工过程中,需要在山地施工,山地的地形复杂,山坡较陡,可能同时存在横坡和纵坡。焊接车在施工工地行走或运输时,经常由于山地坡度较大无法安全进行吊载作业,因此亟需解决该问题。
3、在此需要说明的是,该背景技术部分的陈述仅提供与本发明有关的背景技术,并不必然构成现有技术。
技术实现思路
1、本发明提供一种焊接车,以提高焊接车在坡道上作业的安全性。
2、本发明提供一种焊接车,包括:
3、底盘;
4、第一平台,绕第一轴线可转动地连接于底盘上,第一轴线被配置为沿底盘的横向方向延伸;和
5、第二平台,用于装设作业装置,且第二平台被配置为绕第二轴线可转动地连接于第一平台上,第二轴线与第一轴线平行设置。
6、在一些实施例中,焊接车还包括分别设置在第一轴线的前后两侧的两个第一驱动油缸,第一驱动油缸的第一端与底盘连接,第一驱动油缸的第二端与第一平台连接,第一驱动油缸伸缩动作以驱动第一平台绕第一轴线转动。
7、在一些实施例中,两个第一驱动油缸包括位于前侧的第一前驱动油缸以及位于后侧的第一后驱动油缸,第一前驱动油缸和第一后驱动油缸倾斜设置。
8、在一些实施例中,第二平台包括机架和绕第三轴线可转动地连接于机架上的旋转平台,机架绕第二轴线可转动地连接于第一平台上,第三轴线被配置为沿底盘的纵向方向延伸,作业装置装设在旋转平台上。
9、在一些实施例中,作业装置绕竖直轴线可转动地设置在旋转平台上。
10、在一些实施例中,焊接车还包括设置在旋转平台上的第一角度传感器和与第一角度传感器信号连接的控制器,第一角度传感器用于实时检测旋转平台的倾角,控制器根据第一角度传感器检测的旋转平台的倾角控制第一平台、机架和旋转平台中的至少一个转动。
11、在一些实施例中,焊接车还包括用于测量其行走坡道的坡度的第二角度传感器,第二角度传感器与控制器信号连接,控制器根据第二角度传感器检测的行走坡道的坡度以及旋转平台实时倾角控制第一平台、机架和旋转平台中的至少一个转动。
12、在一些实施例中,第二平台还包括用于驱动机架转动的第二驱动油缸以及用于驱动旋转平台转动的第三驱动油缸。
13、在一些实施例中,作业装置包括吊臂、伸缩式云梯、钻机中的至少一个。
14、基于本发明提供的技术方案,焊接车包括底盘、第一平台和第二平台。第一平台绕第一轴线可转动地连接于底盘上。第一轴线被配置为沿底盘的横向方向延伸。第二平台用于装设作业装置。且第二平台被配置为绕第二轴线可转动地连接于第一平台上。第二轴线与第一轴线平行设置。本发明实施例的焊接车通过将第一平台设置为相对于底盘可转动,并将第二平台设置为相对于第一平台可转动,且第一平台和第二平台的转动轴线均沿底盘的横向方向延伸,这样当焊接车行走在坡道上时,可通过控制第一平台转动并控制第二平台转动以使得装设在第二平台上的作业装置能够水平设置,进而有效保证作业装置作业的安全性。
15、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种焊接车,其特征在于,包括:
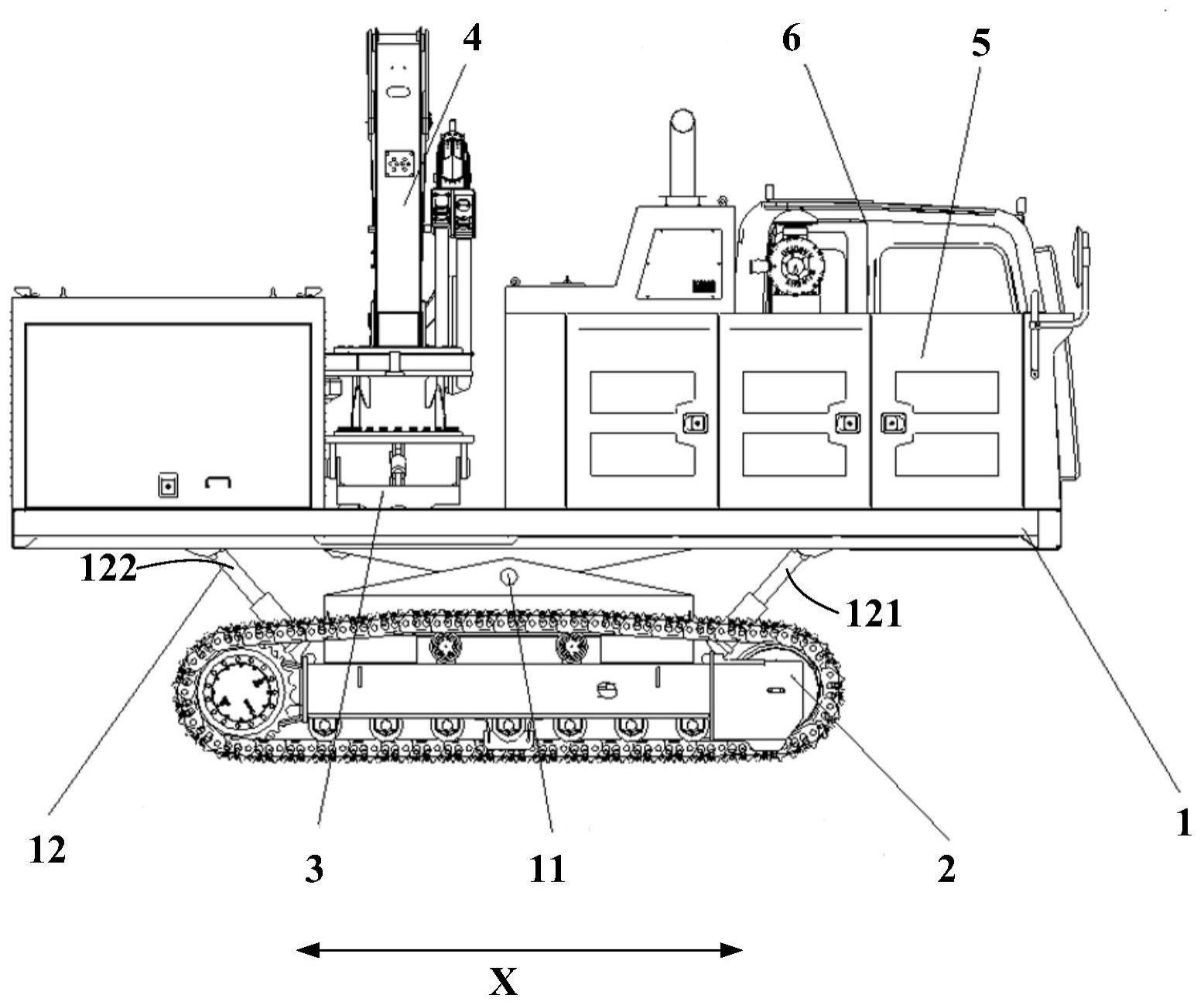
2.根据权利要求1所述的焊接车,其特征在于,所述焊接车还包括分别设置在所述第一轴线的前后两侧的两个第一驱动油缸(12),所述第一驱动油缸(12)的第一端与所述底盘(2)连接,所述第一驱动油缸(12)的第二端与所述第一平台(1)连接,所述第一驱动油缸(12)伸缩动作以驱动所述第一平台(1)绕所述第一轴线转动。
3.根据权利要求2所述的焊接车,其特征在于,所述两个第一驱动油缸包括位于前侧的第一前驱动油缸(121)以及位于后侧的第一后驱动油缸(122),所述第一前驱动油缸(121)和所述第一后驱动油缸(122)倾斜设置。
4.根据权利要求1所述的焊接车,其特征在于,所述第二平台(3)包括机架(31)和绕第三轴线可转动地连接于所述机架(31)上的旋转平台(32),所述机架(31)绕第二轴线可转动地连接于所述第一平台(1)上,所述第三轴线被配置为沿所述底盘(2)的纵向方向(x)延伸,所述作业装置装设在所述旋转平台(32)上。
5.根据权利要求4所述的焊接车,其特征在于,所述作业装置绕竖直轴线可转动地设置在所述旋转平台(32)上。
6.根据权利要求4所述的焊接车,其特征在于,所述焊接车还包括设置在所述旋转平台(32)上的第一角度传感器和与所述第一角度传感器信号连接的控制器,所述第一角度传感器用于实时检测所述旋转平台(32)的倾角,所述控制器根据所述第一角度传感器检测的旋转平台(32)的倾角控制所述第一平台(1)、所述机架(31)和所述旋转平台(32)中的至少一个转动。
7.根据权利要求6所述的焊接车,其特征在于,所述焊接车还包括用于测量其行走坡道的坡度的第二角度传感器,所述第二角度传感器与所述控制器信号连接,所述控制器根据所述第二角度传感器检测的行走坡道的坡度以及所述旋转平台(32)实时倾角控制所述第一平台(1)、所述机架(31)和所述旋转平台(32)中的至少一个转动。
8.根据权利要求4所述的焊接车,其特征在于,所述第二平台(3)还包括用于驱动所述机架(31)转动的第二驱动油缸以及用于驱动所述旋转平台(32)转动的第三驱动油缸。
9.根据权利要求1所述的焊接车,其特征在于,所述作业装置包括吊臂、伸缩式云梯、钻机中的至少一个。
技术总结
本发明公开了一种焊接车。焊接车包括底盘、第一平台和第二平台。第一平台绕第一轴线可转动地连接于底盘上。第一轴线被配置为沿底盘的横向方向延伸。第二平台用于装设作业装置。且第二平台被配置为绕第二轴线可转动地连接于第一平台上。第二轴线与第一轴线平行设置。本发明的焊接车通过将第一平台设置为相对于底盘可转动,并将第二平台设置为相对于第一平台可转动,且第一平台和第二平台的转动轴线均沿底盘的横向方向延伸,这样当焊接车行走在坡道上时,可通过控制第一平台转动并控制第二平台转动以使得装设在第二平台上的作业装置能够水平设置,进而有效保证作业装置作业的安全性。
技术研发人员:颛孙宗琪,尚君辉,田佳佳,徐阔,牛童立
受保护的技术使用者:徐工集团工程机械股份有限公司建设机械分公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!