一种步进式直线导轨单轴送料机器人的制作方法
本发明涉及送料机器人,具体为一种步进式直线导轨单轴送料机器人。
背景技术:
1、送料机器人是指用于运输物料的自动化设备,直线单轴送料机器人则是只能在直线上运输物料的机器人,通过机器人自动化对物料进行运输,减少人力,提高工业生产加工的效率。
2、现有的单轴送料机器人在运输矩形的箱体物品时,一般都是通过两侧夹持,依靠摩擦力将箱体固定在送料机器人上进行运输,运输至指定地点后再放下,箱体物品从静置的状态被送料机器人夹持固定进行运输时,需要将箱体物品抬高一定的高度,使得在运输过程中箱体不会与地面接触产生磨损,在运输至指定地点后下降一定的高度缓慢松开物品,但由于在运输过程中箱体的重力作用下,可能会克服摩擦力产生一定的下滑,但送料机器人在运输过程中上升和下降的量都是一定的,这样就会对箱体的运输造成影响,如果是贵重物品还可能会损坏。
3、基于此,本发明设计了一种步进式直线导轨单轴送料机器人,以解决上述的箱体物品在运输过程中不好实现轻拿轻放如果是贵重物品容易损坏的问题。
技术实现思路
1、本发明的目的在于提供一种步进式直线导轨单轴送料机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种步进式直线导轨单轴送料机器人,包括固定框,所述固定框的内部转动连接有滑动丝杆,所述固定框内部滑动设置有滑块,所述滑块螺旋套接在滑动丝杆外部,所述滑块顶部设置有固定板,所述固定板顶端固定连接有伸缩杆,所述伸缩杆的输出轴上设置有翻转夹持组件,所述翻转夹持组件用于通过翻转箱体的方式,对箱体进行稳定夹持,从而在箱体运输的上下料步骤实现轻拿轻放。
3、作为本发明的进一步方案,所述翻转夹持组件包括连接框,所述连接框固定在伸缩杆的输出轴顶部,所述连接框内部一侧设置有第一连接杆,所述连接框内部另一侧设置有支撑框,所述连接框内壁上固定连接有用于和第一连接杆、支撑框滑动连接的滑轨,所述连接框内部转动连接有双向丝杆,所述第一连接杆、支撑框均分别螺旋套接在双向丝杆外部,且第一连接杆、支撑框的螺纹方向相反,所述第一连接杆一端固定连接有压板,所述第二连接杆一端固定连接有支撑框,所述压板顶部两侧均分别设置有连接板,所述压板内部滑动连接有滑动杆,所述滑动杆上用于其复位的复位弹簧,所述压板顶端内部固定连接有限位块,所述限位块滑动套接在滑动杆上,所述滑动杆顶端穿过压板并与连接板固定连接,所述连接板底部固定连接有限位轴,所述限位轴滑动设置在压板内部,所述连接板上设置有单向轴承,所述单向轴承外部固定连接有橡胶轮;
4、所述支撑框上设置有直角架,所述直角架两端均分别固定连接有转轴,所述转轴与支撑框内壁转动连接,所述支撑框内部转动连接有转杆,所述转杆两端均分别设置有用于其复位的扭簧,所述转杆上固定连接有若干个呈等距分布的转动板,所述支撑框上开设有若干个和转动板对应的对接槽。
5、作为本发明的进一步方案,所述连接框一端固定连接有固定电机,所述固定电机的输出端穿过连接框并与双向丝杆固定连接。
6、作为本发明的进一步方案,支撑框的一端设置有倾斜的切面,所述切面表面均为光滑壁。
7、作为本发明的进一步方案,所述滑块顶部转动连接有转动座,所述固定板固定在转动座顶端,所述滑块的内部固定连接有用于驱动转动座转动的转动电机。
8、作为本发明的进一步方案,所述滑块的底部转动连接有滑轮,所述滑块通过滑轮与固定框底部滚轮连接。
9、作为本发明的进一步方案,所述固定框一端固定连接有驱动电机,所述驱动电机的输出轴穿过固定框并与滑动丝杆固定连接。
10、作为本发明的进一步方案,所述直角架的一侧壁与支撑框的一侧壁所在平面处于同一水平面。
11、作为本发明的进一步方案,所述滑块内部固定连接有气缸,所述气缸的输出端与伸缩杆底部固定连接。
12、与现有技术相比,本发明的有益效果是:
13、1.本发明采用翻转夹持组件,在运输箱体时,由于连接板对箱体的力的方向是在箱体的顶部,而直角架对箱体阻力的方向是在底部,在持续受力下使得箱体会出现转动,即箱体的底部会绕直角架转动到与转动板接触的位置,且此时箱体发生翻转后,本来与箱体侧壁接触的连接板,变成了箱体的顶部位于连接板的下方,此时压板仍在通过连接板推动箱体,箱体在受力下持续翻转并且挤压转动板带动转杆转动,逐渐转动的箱体会顶动连接板,使得滑动杆拉伸复位弹簧向上滑动,同时连接板上的橡胶轮会逐渐与箱体接触,并滚动挤压箱体,使得箱体在夹持过程中能够非常轻缓的翻转,翻转完成后能够稳定地被夹持运输,运输至指定地点后再次翻转箱体使其恢复初始方位。
技术特征:
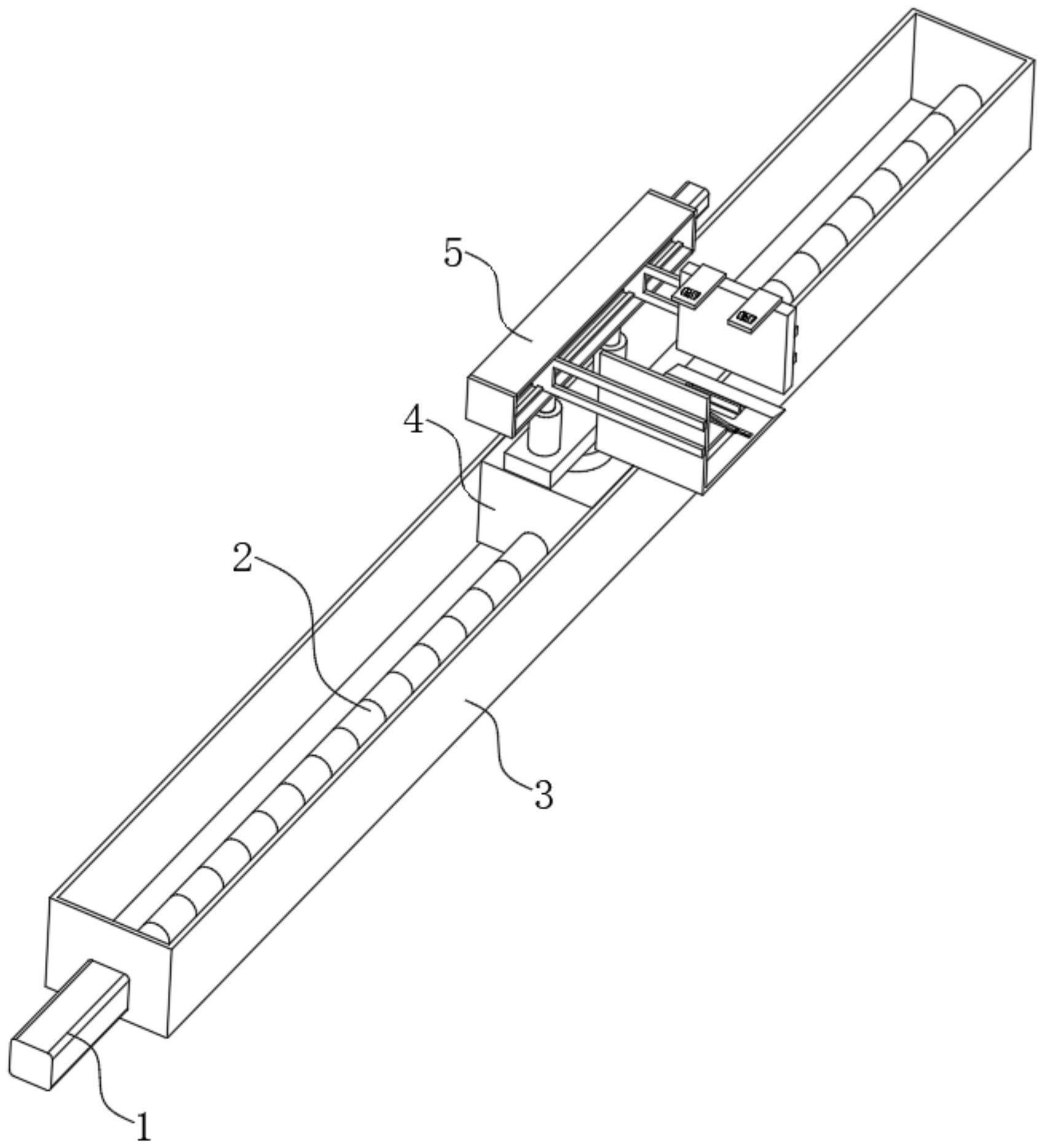
1.一种步进式直线导轨单轴送料机器人,包括固定框(3),所述固定框(3)的内部转动连接有滑动丝杆(2),所述固定框(3)内部滑动设置有滑块(4),所述滑块(4)螺旋套接在滑动丝杆(2)外部,所述滑块(4)顶部设置有固定板(7),所述固定板(7)顶端固定连接有伸缩杆(8),其特征在于:所述伸缩杆(8)的输出轴上设置有翻转夹持组件,所述翻转夹持组件用于通过翻转箱体的方式,对箱体进行稳定夹持,从而在箱体运输的上下料步骤实现轻拿轻放。
2.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述翻转夹持组件包括连接框(5),所述连接框(5)固定在伸缩杆(8)的输出轴顶部,所述连接框(5)内部一侧设置有第一连接杆(12),所述连接框(5)内部另一侧设置有支撑框(15),所述连接框(5)内壁上固定连接有用于和第一连接杆(12)、支撑框(15)滑动连接的滑轨(9),所述连接框(5)内部转动连接有双向丝杆(11),所述第一连接杆(12)、支撑框(15)均分别螺旋套接在双向丝杆(11)外部,且第一连接杆(12)、支撑框(15)的螺纹方向相反,所述第一连接杆(12)一端固定连接有压板(14),所述第二连接杆(16)一端固定连接有支撑框(15),所述压板(14)顶部两侧均分别设置有连接板(13),所述压板(14)内部滑动连接有滑动杆(29),所述滑动杆(29)上用于其复位的复位弹簧(28),所述压板(14)顶端内部固定连接有限位块(27),所述限位块(27)滑动套接在滑动杆(29)上,所述滑动杆(29)顶端穿过压板(14)并与连接板(13)固定连接,所述连接板(13)底部固定连接有限位轴(26),所述限位轴(26)滑动设置在压板(14)内部,所述连接板(13)上设置有单向轴承(25),所述单向轴承(25)外部固定连接有橡胶轮(24);
3.根据权利要求2所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述连接框(5)一端固定连接有固定电机(10),所述固定电机(10)的输出端穿过连接框(5)并与双向丝杆(11)固定连接。
4.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:支撑框(15)的一端设置有倾斜的切面,所述切面表面均为光滑壁。
5.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述滑块(4)顶部转动连接有转动座(6),所述固定板(7)固定在转动座(6)顶端,所述滑块(4)的内部固定连接有用于驱动转动座(6)转动的转动电机。
6.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述滑块(4)的底部转动连接有滑轮,所述滑块(4)通过滑轮与固定框(3)底部滚轮连接。
7.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述固定框(3)一端固定连接有驱动电机(1),所述驱动电机(1)的输出轴穿过固定框(3)并与滑动丝杆(2)固定连接。
8.根据权利要求2所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述直角架(18)的一侧壁与支撑框(15)的一侧壁所在平面处于同一水平面。
9.根据权利要求1所述的一种步进式直线导轨单轴送料机器人,其特征在于:所述滑块(4)内部固定连接有气缸,所述气缸的输出端与伸缩杆(8)底部固定连接。
技术总结
本发明公开了送料机器人技术领域的一种步进式直线导轨单轴送料机器人,包括固定框,所述固定框的内部转动连接有滑动丝杆,所述固定框内部滑动设置有滑块,所述滑块螺旋套接在滑动丝杆外部,所述滑块顶部设置有固定板,所述固定板顶端固定连接有伸缩杆,所述伸缩杆的输出轴上设置有翻转夹持组件,本发明采用翻转夹持组件,在运输箱体时,由于连接板对箱体的力的方向是在箱体的顶部,而直角架对箱体阻力的方向是在底部,在持续受力下使得箱体会出现转动,即箱体的底部会绕直角架转动到与转动板接触的位置,配合弹性的转动板支撑箱体翻转,使得箱体能够轻缓的转动然后被夹持运输。
技术研发人员:黄永活
受保护的技术使用者:深圳市策朗智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!