基于GNSS差分定位的轮胎吊纠偏控制方法、装置及可读介质与流程
本发明涉及纠偏控制领域,具体涉及一种基于gnss差分定位的轮胎吊纠偏控制方法、装置及可读介质。
背景技术:
1、轮胎吊是集装箱码头堆场重要的集装箱装卸设备,其行走时,可能出现rtg偏离车道中心线的情况,需要纠正行驶轨迹回归车道中心位置,这个过程被称为“纠偏”。当前rtg纠偏主要依靠轮胎吊司机人工操作,司机需时刻紧盯rtg在车道中的位置,当出现rtg偏离中心车道时手动打手柄进行纠偏,由此劳动强度较大,工作效率较低,且一旦出现误判或操作不当,极易造成撞箱或撞滑触线等安全事故。随着人工智能和自动化技术的发展,轮胎吊自动纠偏已成为趋势。
2、现有的轮胎吊自动纠偏技术方案如下:
3、(1)地面划线和图像识别纠偏法,该方案在轮胎吊运行路线上划定标准线,用摄像机等摄像设备摄入图像,然后将识别后的图像作为纠偏依据。但是在雨雪天气时无法正常工作,线道缺损对识别影响干扰大。
4、(2)地面埋设检测体纠偏法,该方案在地面埋设金属等检测体,通过磁感应等方式来感应检测体。但是检测体埋入的工程量较大,且受地面物体的干扰较大。
5、(3)红外线或光电测距纠偏法,该方案对反射体的要求较高,需要很强的反射光才能工作,且受外部光线等干扰严重,难以正确反映设备的实际位置。
技术实现思路
1、针对上述提到的技术问题。本技术的实施例的目的在于提出了一种基于gnss差分定位的轮胎吊纠偏控制方法、装置及可读介质,来解决以上背景技术部分提到的技术问题,可用于轮胎吊在集装箱堆场作业时实现自动车道保持,有效降低司机劳动强度,提高作业效率和设备运行安全性,为智能化码头远程控制轮胎吊提供技术支撑。
2、第一方面,本发明提供了一种基于gnss差分定位的轮胎吊纠偏控制方法,包括以下步骤:
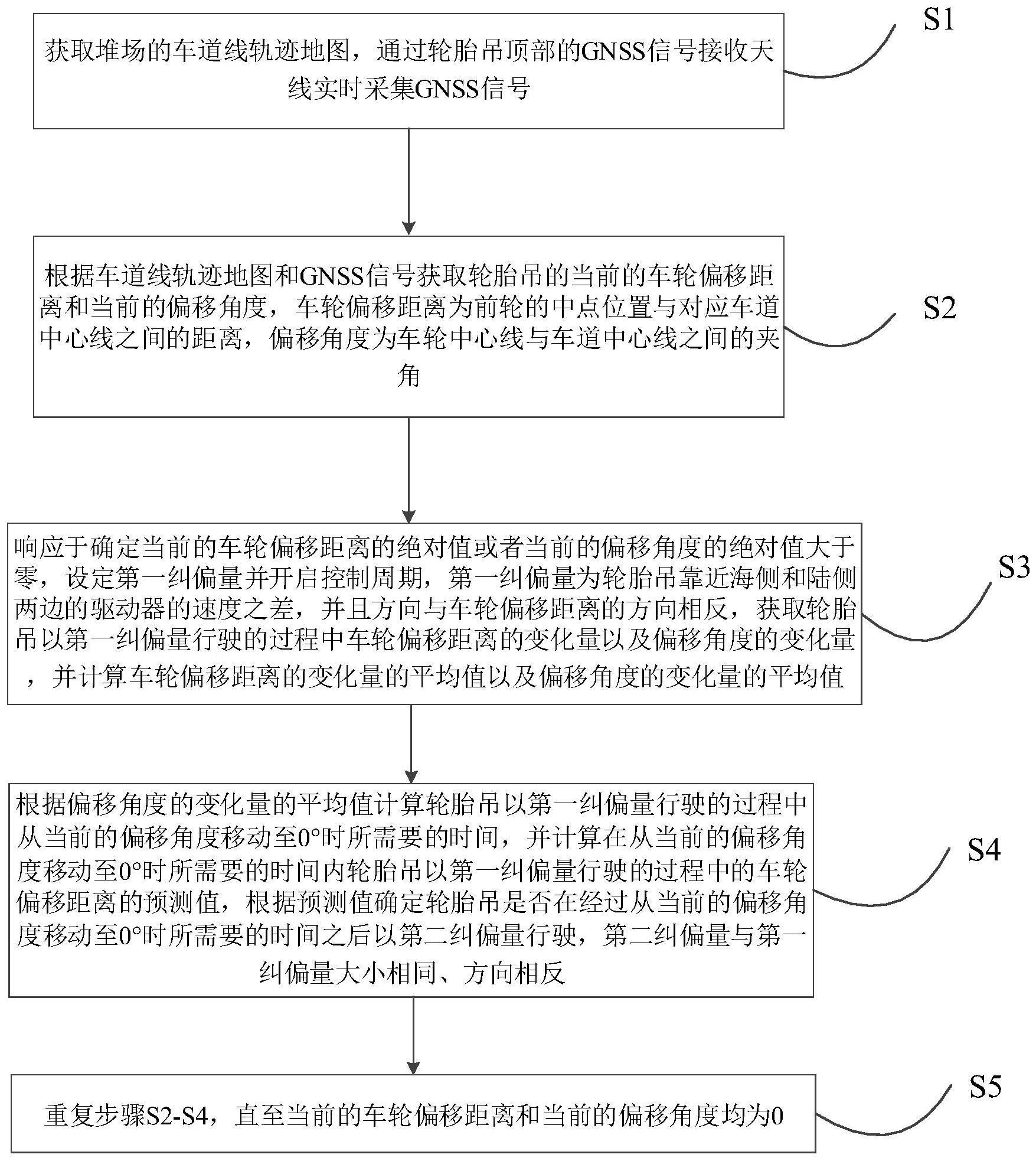
3、s1,获取堆场的车道线轨迹地图,通过轮胎吊顶部的gnss信号接收天线实时采集gnss信号;
4、s2,根据车道线轨迹地图和gnss信号获取轮胎吊的当前的车轮偏移距离和当前的偏移角度,车轮偏移距离为前轮的中点位置与对应车道中心线之间的距离,偏移角度为车轮中心线与车道中心线之间的夹角;
5、s3,响应于确定当前的车轮偏移距离的绝对值或者当前的偏移角度的绝对值大于零,设定第一纠偏量并开启控制周期,第一纠偏量为轮胎吊靠近海侧和陆侧两边的驱动器的速度之差,并且方向与车轮偏移距离的方向相反,获取轮胎吊以第一纠偏量行驶的过程中车轮偏移距离的变化量以及偏移角度的变化量,并计算车轮偏移距离的变化量的平均值以及偏移角度的变化量的平均值;
6、s4,根据偏移角度的变化量的平均值计算轮胎吊以第一纠偏量行驶的过程中从当前的偏移角度移动至0°时所需要的时间,并计算在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以第一纠偏量行驶的过程中的车轮偏移距离的预测值,根据预测值确定轮胎吊是否在经过从当前的偏移角度移动至0°时所需要的时间之后以第二纠偏量行驶,第二纠偏量与第一纠偏量大小相同、方向相反;
7、s5,重复步骤s2-s4,直至当前的车轮偏移距离和当前的偏移角度均为0。
8、作为优选,步骤s2中根据车道线轨迹地图和gnss信号获取轮胎吊的当前的车轮偏移距离和当前的偏移角度,具体包括:
9、根据gnss信号以及车道线轨迹地图确定gnss信号接收天线的投影点与轨迹中心线的距离l1,并标定出车轮的中心点与轨迹中心线的距离l2,计算出误差e:
10、e=l2-l1;
11、根据标定出的误差e以及实时采集到的gnss信号以及车道线轨迹地图确定gnss信号接收天线的投影点与轨迹中心线的距离l1计算出当前的车轮偏移距离s:
12、s=l1+e。
13、作为优选,步骤s4中根据偏移角度的变化量的平均值计算轮胎吊以第一纠偏量行驶的过程中从当前的偏移角度移动至0°时所需要的时间,并计算在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以第一纠偏量行驶的过程中的车轮偏移距离的预测值,具体包括:
14、设第一纠偏量的值为常量r,根据下式计算轮胎吊以第一纠偏量行驶的过程中从当前的偏移角度移动至0°时所需要的时间t:
15、
16、其中,为偏移角度的变化量的平均值,θ为当前的偏移角度;
17、在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以第一纠偏量行驶的过程中的车轮偏移距离的预测值sp为:
18、
19、v横=v瞬*sinθ;
20、其中,v横为轮胎吊的横向速度,v瞬为轮胎吊的瞬时速度,θ为偏移角度,为车轮偏移距离的变化量的平均值。
21、作为优选,步骤s4中根据预测值确定轮胎吊是否在经过从当前的偏移角度移动至0°时所需要的时间之后以第二纠偏量行驶,具体包括:
22、响应于确定在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以第一纠偏量行驶的过程中的车轮偏移距离的预测值大于或等于当前的车轮偏移距离,则轮胎吊以第二纠偏量行驶;
23、响应于确定在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以纠偏量行驶的过程中的车轮偏移距离的预测值小于当前的车轮偏移距离,则轮胎吊继续以第一纠偏量行驶。
24、作为优选,当轮胎吊在前进过程中车轮朝向陆侧偏移时,车轮偏移距离为正,偏移角度为正;当轮胎吊在前进过程中车轮朝向海侧偏移时,车轮偏移距离为负,偏移角度为负。
25、作为优选,步骤s4和步骤s5之间还包括:
26、响应于确定轮胎吊以第一纠偏量或第二纠偏量继续行驶过程中当前的车轮偏移距离和当前的偏移角度中任意一个的方向变为相反的方向,则进入步骤s5。
27、作为优选,步骤s4和步骤s5之间还包括:
28、响应于确定轮胎吊以第一纠偏量或第二纠偏量继续行驶过程中当前的车轮偏移距离和当前的偏移角度其中一个为0,则进入步骤s5。
29、第一方面,本发明提供了一种基于gnss差分定位的轮胎吊纠偏控制装置,包括:
30、信号获取模块,被配置为获取堆场的车道线轨迹地图,通过轮胎吊顶部的gnss信号接收天线实时采集gnss信号;
31、偏移计算模块,被配置为根据车道线轨迹地图和gnss信号获取轮胎吊的当前的车轮偏移距离和当前的偏移角度,车轮偏移距离为前轮的中点位置与对应车道中心线之间的距离,偏移角度为车轮中心线与车道中心线之间的夹角;
32、纠偏模块,被配置为响应于确定当前的车轮偏移距离的绝对值或者当前的偏移角度的绝对值大于零,设定第一纠偏量并开启控制周期,第一纠偏量为轮胎吊靠近海侧和陆侧两边的驱动器的速度之差,并且方向与车轮偏移距离的方向相反,获取轮胎吊以第一纠偏量行驶的过程中车轮偏移距离的变化量以及偏移角度的变化量,并计算车轮偏移距离的变化量的平均值以及偏移角度的变化量的平均值;
33、反向纠偏模块,被配置为根据偏移角度的变化量的平均值计算轮胎吊以第一纠偏量行驶的过程中从当前的偏移角度移动至0°时所需要的时间,并计算在从当前的偏移角度移动至0°时所需要的时间内轮胎吊以第一纠偏量行驶的过程中的车轮偏移距离的预测值,根据预测值确定轮胎吊是否在经过从当前的偏移角度移动至0°时所需要的时间之后以第二纠偏量行驶,第二纠偏量与第一纠偏量大小相同、方向相反;
34、重复模块,重复执行信号获取模块至反向纠偏模块,直至当前的车轮偏移距离和当前的偏移角度均为0。
35、第三方面,本发明提供了一种电子设备,包括一个或多个处理器;存储装置,用于存储一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如第一方面中任一实现方式描述的方法。
36、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
37、相比于现有技术,本发明具有以下有益效果:
38、(1)本发明提出的基于gnss差分定位的轮胎吊纠偏控制方法根据驱动器的速度参数、调整rgt变频器的输出控制和运行指令等的控制,从而实现自动纠偏,能有效降低司机的劳动强度和提高作业效率。
39、(2)本发明提出的基于gnss差分定位的轮胎吊纠偏控制方法依靠地面基站和多个卫星通信实现厘米级定位,不受云层干扰,且能根据高程等运动信息得知地势的动态变化,能有效摆脱天气、场地状态、地面物体等干扰,具备较强的系统鲁棒性。
40、(3)本发明提出的基于gnss差分定位的轮胎吊纠偏控制方法根据rtg偏离车道中心线的距离来设置减速或停止控制信号,有效避免碰撞事故,提高设备运行的安全性。
- 还没有人留言评论。精彩留言会获得点赞!