一种一体化激光焊接设备及其工作方法与流程
本发明属于激光焊接,具体涉及一种一体化激光焊接设备及其工作方法。
背景技术:
1、激光焊接机,又常称为激光焊机、镭射焊机,是材料加工激光焊接时用的机器,激光焊接是利用高能量的激光脉冲对材料进行微小区域内的局部加热,激光辐射的能量通过热传导向材料的内部扩散,将材料熔化后形成特定熔池。它是一种新型的焊接方式,主要针对薄壁材料、精密零件的焊接,可实现点焊、对接焊、叠焊、密封焊等,深宽比高,焊缝宽度小,热影响区小、变形小,焊接速度快,焊缝平整、美观,焊后无需处理或只需简单处理,焊缝质量高,无气孔,可精确控制,聚焦光点小,定位精度高,易实现自动化。
2、一体化激光焊接设备即为激光焊接机中的一种,现有的一体化激光焊接设备在使用过程中,由于光纤线多采用缠绕方式进行卷收时,极易对光纤线进行弯折和破坏,同时无法控制光纤线的缠绕绷紧应力,极易产生炸线,为此提出一种一体化激光焊接设备及其工作方法。
技术实现思路
1、本发明的目的在于提供一种一体化激光焊接设备及其工作方法,旨在解决由于光纤线多采用缠绕方式进行卷收时,极易对光纤线进行弯折和破坏,同时无法控制光纤线的缠绕绷紧应力,极易产生炸线。
2、为实现上述目的,本发明提供如下技术方案:
3、一种一体化激光焊接设备,包括:
4、机箱;
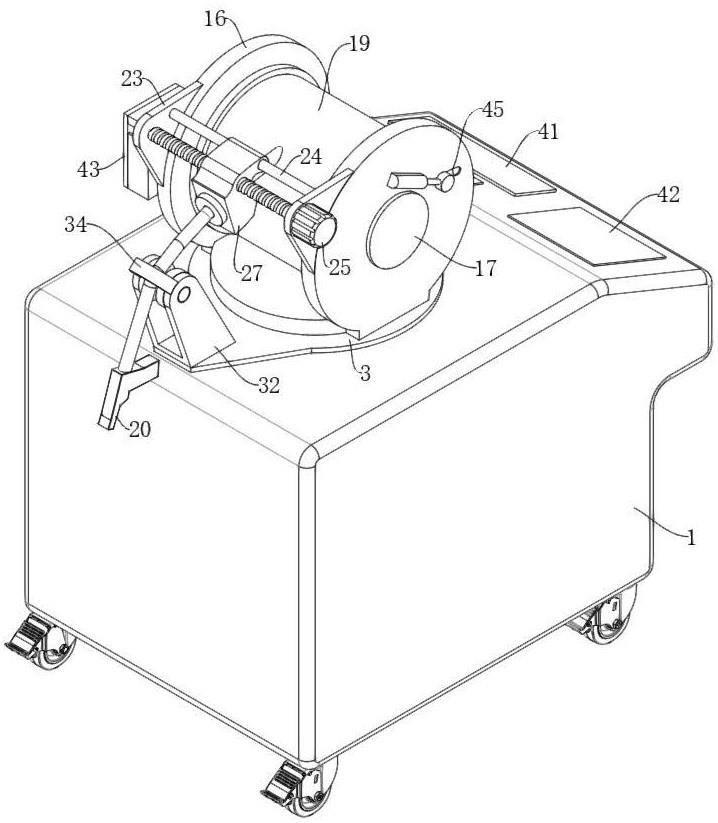
5、偏转盘,所述偏转盘通过转动轴承转动连接机箱的顶部,所述偏转盘的顶部固定连接有空心支架,所述空心支架与偏转盘之间设置有导线机构;
6、转轴,所述转轴转动连接于空心支架的内壁之间,所述转轴的圆周表面固定连接有卷收轮,所述卷收轮的内壁之间缠绕有光纤线,所述光纤线的另一端固定连接有激光焊枪;以及
7、卷收机构,所述卷收机构设置于机箱的内壁之间,所述卷收机构与转轴相连接,用以对转轴进行旋转。
8、作为本发明一种优选的方案,所述卷收机构包括驱动组件、传动组件、定向组件、限位组件和调节组件,所述限位组件设置于空心支架的内壁之间,所述限位组件与转轴相连接,所述传动组件设置于空心支架及偏转盘内,所述传动组件与转轴相连接,所述导向组件设置于机箱的内壁之间,所述导向组件与偏转盘相连接,所述驱动组件设置于机箱的内壁之间,所述驱动组件与传动组件相连接,所述调节组件设置于机箱的内壁之间,所述调节组件与驱动组件相连接。
9、作为本发明一种优选的方案,所述调节组件包括支撑板、导槽、引导块、第一连杆、第二连杆和第三电动推杆,所述支撑板固定连接于机箱的内壁之间,所述导槽开设于支撑板的顶部,所述引导块滑动于导槽的内壁之间,所述第一连杆通过铰轴转动连接于引导块的底部,所述第三电动推杆固定连接于支撑板的底部,所述第二连杆通过铰轴转动连接于第三电动推杆的输出端,所述第二连杆的另一端与第一连杆通过铰轴转动连接。
10、作为本发明一种优选的方案,所述导向组件包括限位齿轮、第一电动推杆和限位卡块,所述限位齿轮固定连接于偏转盘的底部,所述第一电动推杆转动连接于支撑板的顶部,所述第一电动推杆与限位齿轮相卡合,所述限位卡块固定连接于机箱的内壁上,所述限位卡块的输出端与第一电动推杆转动连接。
11、作为本发明一种优选的方案,所述限位组件包括限位棘轮、棘爪、第二推动电机和摆动槽,所述摆动槽开设于空心支架的侧端,所述限位棘轮固定连接于转轴的圆周表面,所述限位棘轮位于空心支架的内壁之间,所述棘爪转动连接于空心支架的内壁之间,所述棘爪与限位棘轮相卡合,所述第二推动电机固定连接于空心支架的侧端,所述第二推动电机的输出端滑动于摆动槽内,且所述第二推动电机的输出端与棘爪转动连接。
12、作为本发明一种优选的方案,所述传动组件包括传动槽、第一传动齿轮、第二传动齿轮、第二斜齿轮、第三传动齿轮和第四传动齿轮,所述传动槽开设于偏转盘的顶部,所述传动槽贯穿偏转盘和限位齿轮,所述传动槽与空心支架相连通,所述第一传动齿轮转动连接于传动槽的内壁之间,所述第一传动齿轮的低端延伸限位齿轮的底部,所述第二传动齿轮转动连接于传动槽的内壁之间,所述第二传动齿轮与第一传动齿轮相啮合,所述第二传动齿轮的上端延伸至空心支架内,所述第一斜齿轮固定连接于第一斜齿轮固定连接于第二传动齿轮的顶部,所述第一斜齿轮位于空心支架的内壁之间,所述第四传动齿轮固定连接于转轴的圆周表面,所述第四传动齿轮位于空心支架的内壁之间,所述第三传动齿轮转动连接于空心支架的内壁之间,所述第三传动齿轮与第四传动齿轮相啮合,所述第二斜齿轮固定连接于第三传动齿轮的侧端,所述第二斜齿轮与第一斜齿轮相啮合。
13、作为本发明一种优选的方案,所述驱动组件包括驱动电机、第一从动齿轮、主动齿轮和第二从动齿轮,所述第一从动齿轮固定连接于限位齿轮的底部,所述第二从动齿轮固定连接于第一传动齿轮的低端,所述驱动电机固定连接于第一连杆的底部,所述驱动电机的输出端延伸至支撑板的顶部,所述主动齿轮固定连接于驱动电机的输出端,所述主动齿轮位于第一从动齿轮和第二从动齿轮之间。
14、作为本发明一种优选的方案,所述导线机构包括支撑块、导杆、转动电机、丝杆、空心滑块、环形刮块、导轮架、引导轮和限位环,所述支撑块设置有两个,两个所述支撑块固定连接于空心支架的两个侧端,所述导杆固定连接于两个支撑块之间,所述转动电机固定连接于一个支撑块的侧端,所述丝杆转动连接于两个支撑块之间,所述丝杆的一端与转动电机的输出端固定连接,所述空心滑块套设于导杆和丝杆的圆周表面,同时所述空心滑块套设于光纤线的圆周表面,所述环形刮块套设于光纤线的圆周表面,所述环形刮块与空心滑块固定连接,所述导轮架固定连接于偏转盘的顶部,所述引导轮转动连接于导轮架的内壁之间,且所述引导轮位于光纤线的底部,所述限位环固定连接于导轮架的顶部。
15、作为本发明一种优选的方案,所述机箱的侧端安装有显示屏和操作板。
16、一种一体化激光焊接设备的工作方法,所述方法包括如下步骤:
17、s1、转向定位:
18、将装置移动至焊接处,通过操作板启动限位卡块,限位卡块的输出端拉动第一电动推杆远离限位齿轮,解除对限位齿轮的限位锁死,启动第三电动推杆,第三电动推杆的输出端拉动第二连杆和第一连杆进行移动,使得引导块于导槽进行滑动,使得驱动电机带动主动齿轮进行移动,主动齿轮通过移动与限位齿轮相啮合,启动驱动电机,驱动电机的输出端带动主动齿轮进行旋转,主动齿轮通过与限位齿轮的啮合带动限位齿轮进行旋转,限位齿轮带动偏转盘进行旋转,使得偏转盘顶部的光纤线的伸缩方向进行偏转,当光纤线旋转至需要方向时,通过操作板控制第三电动推杆的输出端推动第一电动推杆,第一电动推杆与限位齿轮相啮合对限位齿轮进行锁死,实现对光纤线的转向定位;
19、s2、驱动缠绕:
20、当激光焊枪的焊接作业完成时,通过激光焊枪上的控制器,启动第三电动推杆,第三电动推杆的输出端拉动第一连杆和第二连杆,同时带动引导块于导槽内滑动,对驱动电机进行移动,继而带动主动齿轮向第二从动齿轮贴近,使得主动齿轮与第二从动齿轮相啮合,当驱动电机的输出端带动主动齿轮进行旋转,主动齿轮通过与第二从动齿轮的啮合带动第二从动齿轮进行旋转,第二从动齿轮通过旋转带动第一传动齿轮进行旋转,第一传动齿轮通过与第二传动齿轮相啮合带动第二传动齿轮进行旋转,第二传动齿轮通过旋转带动第一斜齿轮进行旋转,第一斜齿轮通过与第二斜齿轮啮合带动第二斜齿轮进行旋转,第二斜齿轮通过旋转带动第三传动齿轮进行旋转,第三传动齿轮通过与第四传动齿轮的啮合带动第四传动齿轮进行旋转,第四传动齿轮通过旋转带动空心支架进行旋转,空心支架通过旋转带动转轴进行旋转,转轴通过旋转带动卷收轮进行旋转,继而实现对光纤线的驱动缠绕;
21、s3、均匀布线:
22、在对光纤线进行缠绕时,启动转动电机,转动电机的输出端带动丝杆进行旋转,丝杆通过与空心滑块的滑动配合推动空心滑块进行旋转,空心滑块通过与导杆的滑动配合进行导向移动,光纤线先经过引导轮的偏转,再经过环形刮块的除杂,缠绕至卷收轮的圆周内壁之间,通过对空心滑块的移动,使得光纤线均匀分布于光纤线内,实现对光纤线的均匀布线;
23、s4、限位锁死:
24、在进行缠绕过程中,缠绕时第二推动电机拉动棘爪进行偏转,解除棘爪与限位棘轮卡合,解除对转轴的锁死,方便转轴进行旋转,当光纤线缠绕完成时,第二推动电机的输出端推动棘爪进行偏转,使得棘爪与限位棘轮相啮合,对转轴的旋转进行单向锁死,避免光纤线缠绕的松动,实现对光纤线的限位锁死。
25、与现有技术相比,本发明的有益效果是:
26、本方案中,当需要对光纤线进行缠绕时,主动齿轮通过与第二从动齿轮的啮合带动第二从动齿轮进行旋转,第二从动齿轮通过旋转带动第一传动齿轮进行旋转,第一传动齿轮通过与第二传动齿轮相啮合带动第二传动齿轮进行旋转,第二传动齿轮通过旋转带动第一斜齿轮进行旋转,第一斜齿轮通过与第二斜齿轮啮合带动第二斜齿轮进行旋转,第二斜齿轮通过旋转带动第三传动齿轮进行旋转,第三传动齿轮通过与第四传动齿轮的啮合带动第四传动齿轮进行旋转,第四传动齿轮通过旋转带动空心支架进行旋转,空心支架通过旋转带动转轴进行旋转,转轴通过旋转带动卷收轮进行旋转,通过对光纤线的一端进行旋转拉动,实现对光纤线进行缠绕,实现光纤线缆的自动回收,作业人员可以在任意方向位置上,通过激光焊枪上的按钮控制光纤线缆的收放,且不会弯折光纤线缆、破坏光纤。
27、本方案中,当需要对主动齿轮进行移动时,第三电动推杆的输出端推拉第二连杆,第二连杆推拉第一连杆,第一连杆拉动引导块于导槽内滑动,同时第一连杆带动驱动电机进行移动,使得主动齿轮于第一从动齿轮和第二从动齿轮之间进行移动,当主动齿轮与第二从动齿轮啮合时,驱动电机为光纤线的缠绕提供动力,当主动齿轮与第一从动齿轮啮合时,驱动电机为光纤线的伸缩方位的偏转提供动力,通过控制主动齿轮的移动,实现单个电机为多种功能部件提供动力,降低对电机的使用频率,提高装置的使用经济效益。
28、本方案中,在缠绕过程中,缠绕时第二推动电机拉动棘爪进行偏转,解除棘爪与限位棘轮卡合,解除对转轴的锁死,方便转轴进行旋转,当光纤线缠绕完成时,第二推动电机的输出端推动棘爪进行偏转,使得棘爪与限位棘轮相啮合,对转轴的旋转进行单向锁死,避免光纤线缠绕的松动,实现对光纤线进行限位锁死,抵消光纤线缠绕的绷紧应力,避免光纤线的炸线。
29、本方案中,在对光纤线进行缠绕时,启动转动电机,转动电机的输出端带动丝杆进行旋转,丝杆通过与空心滑块的滑动配合推动空心滑块进行旋转,空心滑块通过与导杆的滑动配合进行导向移动,光纤线先经过引导轮的偏转,再经过环形刮块的除杂,缠绕至卷收轮的圆周内壁之间,通过对空心滑块的移动,使得光纤线均匀分布于光纤线内,实现对光纤线的均匀布线,通过对光纤线的均匀布线,增加卷收轮对光纤线的容纳率,提高卷收轮内空间的使用率,避免卷收轮内抽出的光纤线无法卷收回卷收轮内,提高设备的实用性。
- 还没有人留言评论。精彩留言会获得点赞!