一种C型钩安全限位装置及其控制方法与流程
本发明属于吊具,具体涉及一种c型钩安全限位装置及其控制方法。
背景技术:
1、现有技术中c型钩是没有设置安全限位装置的,在实际使用中,操作工通过操作小车移动c型钩从而实现c型钩进入钢卷或脱离钢卷,但是在c型钩未全部进入钢卷或未全部脱离钢卷时,操作工因视线遮挡或误操作等原因操作c型钩起升,进而造成掀翻钢卷,发生安全险肇事故。
技术实现思路
1、本发明的目的在于提供一种c型钩安全限位装置及其控制方法,以实现c型钩进入钢卷、起落、脱离钢卷全过程安全操作。
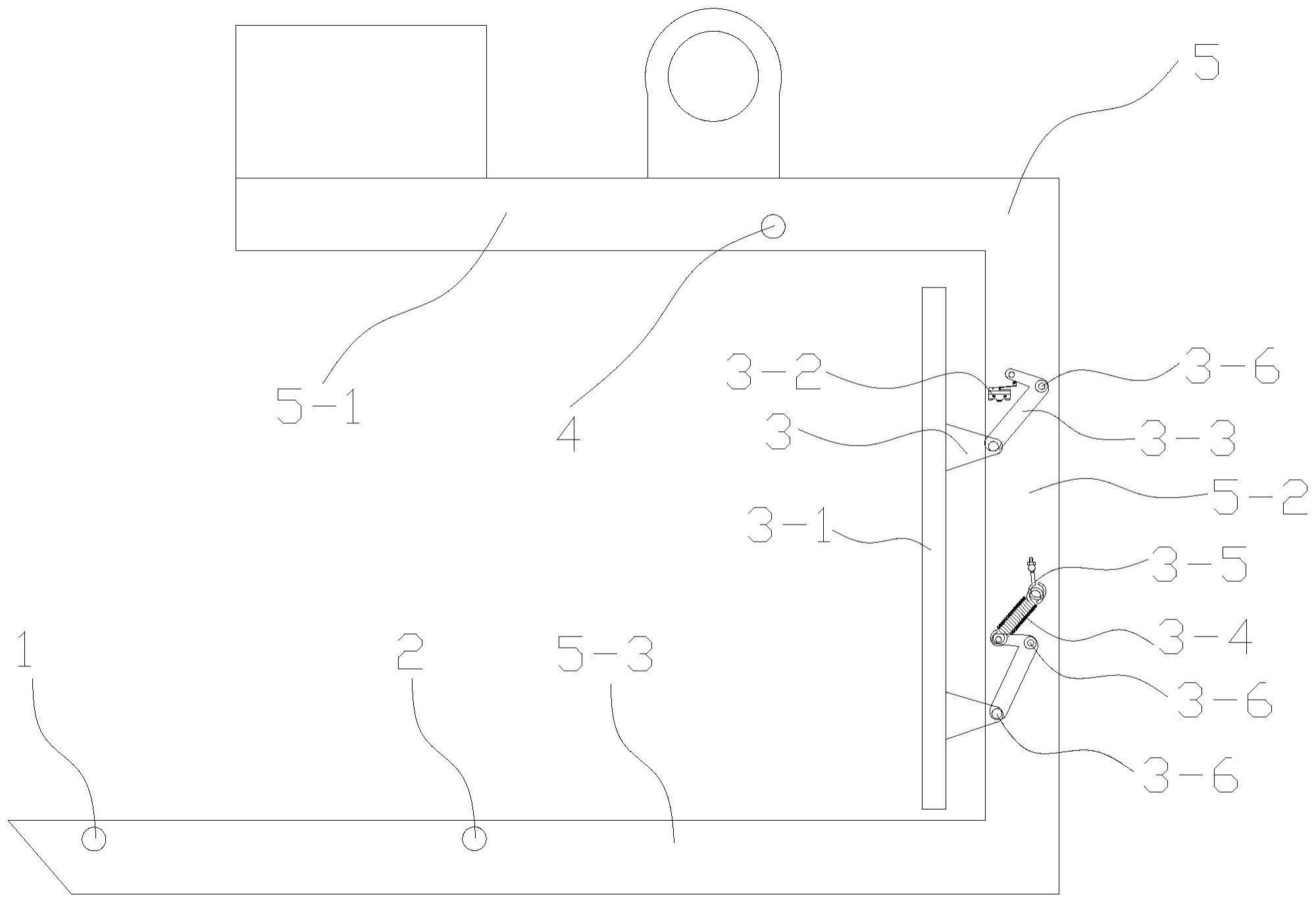
2、本发明解决其技术问题所采用的技术方案是:一种c型钩安全限位装置,包括限位组件一、限位组件二、限位组件三、测距组件和c型钩本体,所述c型钩本体包括上部构件、下部构件以及用于连接上部构件和下部构件一端的立臂,限位装置一安装于下部构件上远离立臂的一端,限位装置二安装于下部构件的中部,限位装置三安装于立臂上,测距组件安装于上部构件上,上部构件的顶部通过挂钩与起重机小车连接,小车安装于大车上,小车能沿大车水平移动,大车能沿厂房钢结构立柱上的轨道进行移动,限位组件一、限位组件二、限位组件三、测距组件、小车、大车均与起重机控制系统电气连接。
3、进一步地,所述限位组件三包括机械联动装置和行程开关,机械联动装置包括立板、v型架、弹簧、挂钩、销轴,v型架设有两组,沿立臂上下设置,v型架的v型底部通过销轴铰接连接于立臂上,v型架的下端通过销轴与立板连接,下部的v型架的上端与弹簧的一端连接,弹簧的另一端与挂钩连接,挂钩通过销轴连接于立臂上,行程开关安装于上部的v型架顶部下方的立臂上。
4、进一步地,所述行程开关为常开模式。
5、进一步地,所述限位组件一和限位组件二为接近开关传感器,为常开模式。
6、进一步地,所述测距组件安装于限位装置二、限位装置三之间位置对应的c型钩本体的上部构件上。
7、c型钩安全限位装置的控制方法,包括以下步骤:
8、1)限位组件一、限位组件二、限位组件三状态均为常开时,c型钩上无钢卷,起重机的大车、小车移动及c型钩起落均能动作;
9、2)操作小车移动,使c型钩的下部构件进入钢卷,当限位装置一由常开变为关闭状态时,联锁大车不能移动,起升机构不能起落;随着c型钩的下部构件继续进入钢卷,限位装置二由常开变为关闭状态,同样联锁大车不能移动,起升机构不能起落;随着c型钩的下部构件继续进入钢卷,当钢卷碰到限位装置三的立板,行程开关由常开变为关闭状态,此时限位装置二和限位装置三同时处于关闭状态,联锁起升机构能起落,大小车能移动;当起升机构启动起升后,由限位装置三关闭状态与起升机构起落信号联锁测距组件启动工作,检测测距组件与钢卷之间距离;
10、3)当起升机构启动下降,钢卷落地时,测距组件检测到测距变小,测距信号联锁起升机构不得起落,大车不得移动,此时联锁移动小车使c型钩脱离钢卷,当限位装置三关闭状态变为常开状态时,测距组件不检测,也不与起升机构大车移动联锁,但是限位装置二为关闭状态,同样联锁大车不能移动,起升机构不能起落;随着c型钩继续脱离钢卷,限位装置一由常开变为关闭状态时,同样联锁大车不能移动,起升机构不能起落,直至c型钩完全脱离钢卷。
11、本发明具有以下有益效果:本发明通过设置限位组件一、限位组件二、限位组件三、测距组件,起重机大车移动、小车移动、c型钩起落进行联锁控制,确保c型钩进入钢卷、起落、脱离钢卷全过程安全操作,避免事故发生。
技术特征:
1.一种c型钩安全限位装置,其特征在于,包括限位组件一、限位组件二、限位组件三、测距组件和c型钩本体,所述c型钩本体包括上部构件、下部构件以及用于连接上部构件和下部构件一端的立臂,限位装置一安装于下部构件上远离立臂的一端,限位装置二安装于下部构件的中部,限位装置三安装于立臂上,测距组件安装于上部构件上,上部构件的顶部通过挂钩与起重机小车连接,小车安装于大车上,小车能沿大车水平移动,大车能沿厂房钢结构立柱上的轨道进行移动,限位组件一、限位组件二、限位组件三、测距组件、小车、大车均与起重机控制系统电气连接。
2.如权利要求1所述的c型钩安全限位装置,其特征在于,所述限位组件三包括机械联动装置和行程开关,机械联动装置包括立板、v型架、弹簧、挂钩、销轴,v型架设有两组,沿立臂上下设置,v型架的v型底部通过销轴铰接连接于立臂上,v型架的下端通过销轴与立板连接,下部的v型架的上端与弹簧的一端连接,弹簧的另一端与挂钩连接,挂钩通过销轴连接于立臂上,行程开关安装于上部的v型架顶部下方的立臂上。
3.如权利要求2所述的c型钩安全限位装置,其特征在于,所述行程开关为常开模式。
4.如权利要求1所述的c型钩安全限位装置,其特征在于,所述限位组件一和限位组件二为接近开关传感器,为常开模式。
5.如权利要求1所述的c型钩安全限位装置,其特征在于,所述测距组件安装于限位装置二、限位装置三之间位置对应的c型钩本体的上部构件上。
6.如权利要求1-5任一所述的c型钩安全限位装置的控制方法,其特征在于,包括以下步骤:
技术总结
本发明属于吊具技术领域,具体涉及一种C型钩安全限位装置及其控制方法,包括限位组件一、限位组件二、限位组件三、测距组件和C型钩本体,C型钩本体包括上部构件、下部构件以及立臂,限位装置一安装于下部构件上远离立臂的一端,限位装置二安装于下部构件的中部,限位装置三安装于立臂上,测距组件安装于上部构件上,限位组件一、限位组件二、限位组件三、测距组件、小车、大车均与起重机控制系统电气连接。本发明通过设置限位组件一、限位组件二、限位组件三、测距组件,起重机大车移动、小车移动、C型钩起落进行联锁控制,确保C型钩进入钢卷、起落、脱离钢卷全过程安全操作,避免事故发生。
技术研发人员:王光成
受保护的技术使用者:莱芜钢铁集团银山型钢有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!