一种适用于船舶外壳体清洗的机器人收放装置的制作方法
本发明涉及船舶除锈领域,具体地说,是一种适用于船舶外壳体清洗的机器人收放装置。
背景技术:
1、船舶停靠在码头时,通常需要利用这段时间对外壳体进行除锈清洗工作;使用的设备通常是爬壁式除锈机器人,而爬壁式除锈机器人通常有150-200kg,其依靠自身的磁吸吸盘吸附在船身,并通过喷头进行清洗;在靠近码头的一侧,可以依托码头建筑设施使用吊装等手段将除锈机器人推至船舶的外壳体上,而远离码头的一侧,由于操作空间有限,导致放置除锈机器人的难度加大,极大的影响了施工效率。
2、综上所述,亟需一种能够实现除锈机器人的灵活收放,结构简单,节省使用空间的适用于船舶外壳体清洗的机器人收放装置。
技术实现思路
1、本发明的目的是,提供一种能够实现除锈机器人的灵活收放,结构简单的适用于船舶外壳体清洗的机器人收放装置。
2、为实现上述目的,本发明采取的技术方案是:
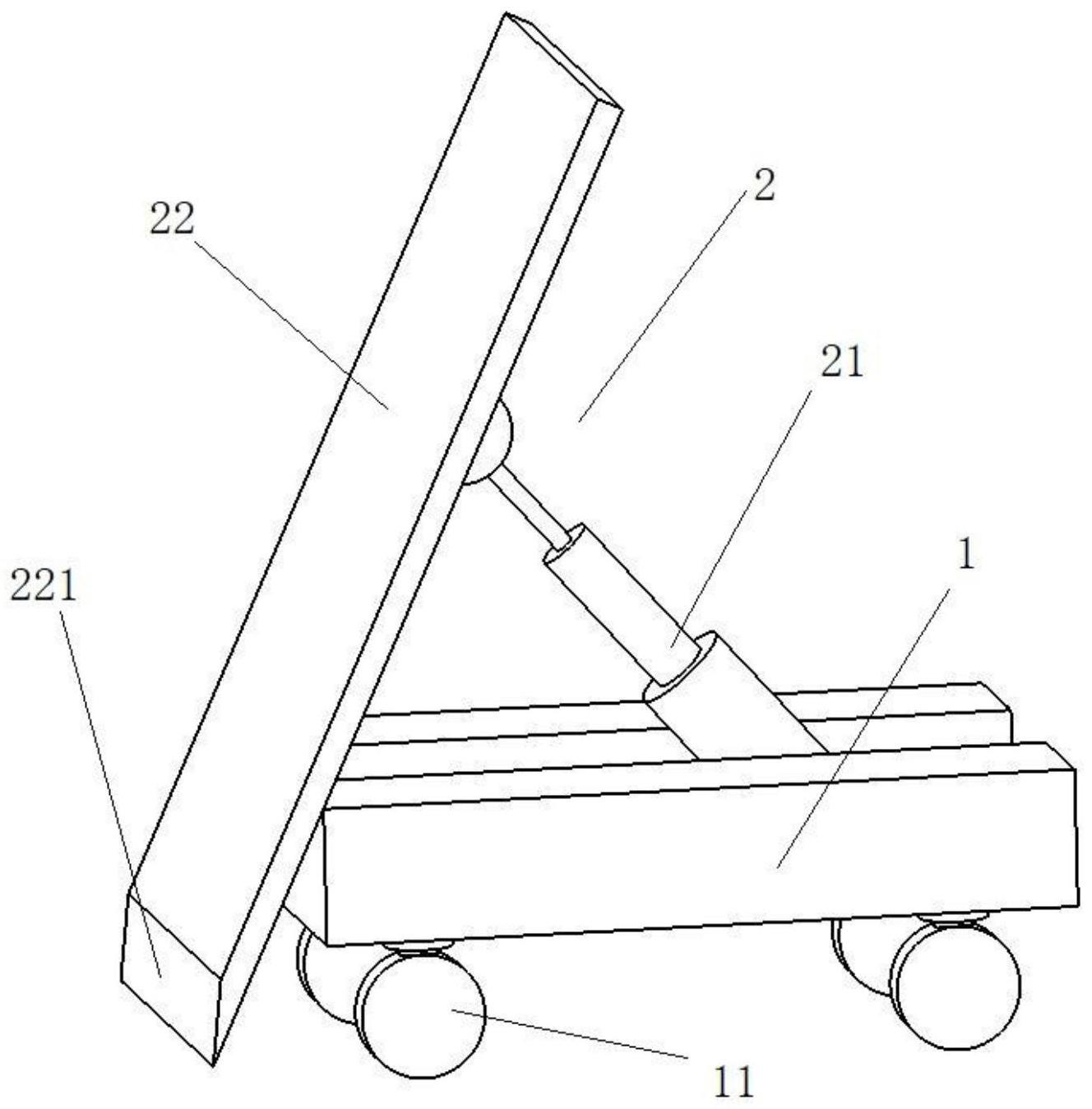
3、一种适用于船舶外壳体清洗的机器人收放装置,包括收放底座、收放载臂;所述收放载臂与所述收放底座活动相连;所述收放载臂包括翻转臂、装载平台;所述翻转臂可带动所述装载平台进行转动。
4、作为一种优选的技术方案,所述翻转臂与所述装载平台之间设有间隙。
5、作为一种优选的技术方案,所述装载平台其上至少一侧设有对接滑坡。
6、作为一种优选的技术方案,所述装载平台由可被磁吸材料制成。
7、作为一种优选的技术方案,所述收放底座其上设有收卷机。
8、作为一种优选的技术方案,所述收放底座其下设有移动轮。
9、作为一种优选的技术方案,所述装载平台其上设有贯通槽。
10、作为一种优选的技术方案,所述收卷机上设有收卷绳。
11、本发明优点在于:
12、本发明所述适用于船舶外壳体清洗的机器人收放装置包括收放底座、收放载臂;所述收放载臂与所述收放底座活动相连,使得所述收放载臂可以实现被装载的对象在大倾角的连接面之间的转移,所述翻转臂与所述装载平台之间设有间隙,尤其适合带有围挡的两面之间的转移,所述装载平台其上至少一侧设有对接滑坡,便于被装载装置的平滑装卸,所述收放载臂包括翻转臂、装载平台,所述装载平台由可被磁吸材料制成,以适用于清洗舱壁的爬壁机器人等,所述收放底座上还可设有收卷机,既可以增加收放底座的自重,增加装置的稳定性,又可以整理与被装载物连接的线束,提升使用的灵活性,所述收卷机为电机驱动的转轴/轮结构。
技术特征:
1.一种适用于船舶外壳体清洗的机器人收放装置,其特征在于,包括收放底座、收放载臂;所述收放载臂与所述收放底座活动相连;所述收放载臂包括翻转臂、装载平台;所述翻转臂可带动所述装载平台进行转动。
2.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述翻转臂与所述装载平台之间设有间隙。
3.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述装载平台其上至少一侧设有对接滑坡。
4.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述装载平台由可被磁吸材料制成。
5.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述收放底座其上设有收卷机。
6.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述收放底座其下设有移动轮。
7.根据权利要求1所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述装载平台其上设有贯通槽。
8.根据权利要求5所述的适用于船舶外壳体清洗的机器人收放装置,其特征在于,所述收卷机上设有收卷绳。
技术总结
本发明涉及一种适用于船舶外壳体清洗的机器人收放装置,包括收放底座、收放载臂;所述收放底座为平板结构,其下设有四个移动轮,方便装置的移动,其上表面设有收放载臂,所述收放载臂包括翻转臂、装载平台,在本实施例中,所述翻转臂为伸缩液压杆,其一端连接所述转载平台,一端连接所述收放底座,所述装载平台为铁制平板结构,其平板长度长于所述收放底座的长度,且所述装载平台通过铰链与所述收放底座边缘铰接,在装载平台的一端设有对接滑坡,在本实施例中,所述对接滑坡为斜面结构,其优点在于,够实现除锈机器人的灵活收放,节省使用空间。
技术研发人员:龚伟兵,庄正印,俞淇,苏宇,阮峻杰,叶志华,翁海龙,薛启刚,徐会超,刘会飞
受保护的技术使用者:舟山中远海运重工有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!