一种高速自动装泡沫盒机及其实现方法与流程
本发明属于自动装泡沫盒,具体涉及一种高速自动装泡沫盒机及其实现方法。
背景技术:
1、铁氧体磁芯多数边角比较锋利,目前多采用泡沫盒包装的方式来进行,运输时保护不好极易产生掉角等问题。
2、传统泡沫盒机需要将产品一个一个隔开后再整体搬运到泡沫盒中,在使用过程中存在一些问题,例如:
3、1、伺服电机会频繁启停,电机容易发热甚至损坏,且由于电机加减速的时间存在,每次隔开一个产品无法做到高速完成。
4、2、当泡沫盒机的速度无法高速运转摆盘时,会使得前道工序的生产节拍也跟着下降,实际生产效率过低。
5、因此,亟需一种可高速摆放产品的自动装泡沫盒设备来对产线节拍进行大幅提升。
技术实现思路
1、本发明的目的在于提供一种高速自动装泡沫盒机,以解决上述背景技术中提出的问题。本发明提供的一种高速自动装泡沫盒机,具有有效提升装泡沫盒效率的特点。
2、本发明另一目的在于提供一种高速自动装泡沫盒机的实现方法。
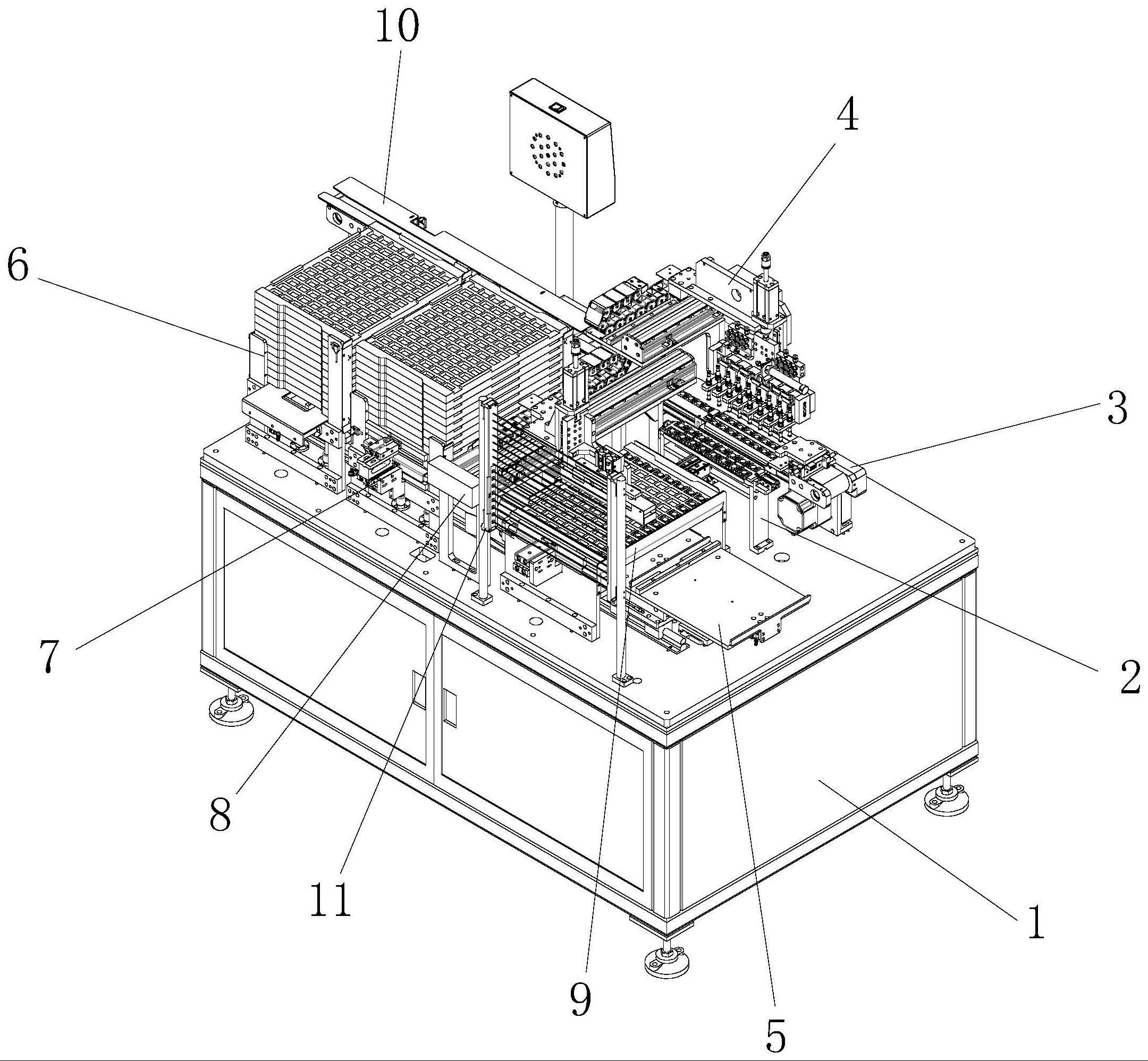
3、为实现上述目的,本发明提供如下技术方案:一种高速自动装泡沫盒机,包括机架,机架的上方安装有进料皮带,进料皮带的出料端连接有分料皮带,机架的上方安装有位于分料皮带上方的变距吸取机构,分料皮带的一侧设有精定位机构,进料皮带的一侧设有泡沫盒移栽机构,机架的上方分别安装有位于泡沫盒移栽机构上方的满泡沫盒料仓、空泡沫盒料仓和泡沫盒定位机构,其中,泡沫盒定位机构位于精定位机构的侧面,空泡沫盒料仓位于泡沫盒定位机构的一侧,满泡沫盒料仓位于空泡沫盒料仓的一侧,机架的上方还安装有位于泡沫盒定位机构上方的横移取放机构,机架的内部安装有与满泡沫盒料仓相对应的气缸顶升机构,机架的内部还安装有分别与空泡沫盒料仓和泡沫盒定位机构相对应的步进丝杆顶升机构,机架的上方安装有位于泡沫盒定位机构侧边的安全光栅组。
4、为了实现自动将输送过来的产品按照设定的数量进行两列排列,进一步地,分料皮带上方的一端连接有导料挡板,分料皮带上方的另一端安装有工位切换气缸,工位切换气缸的输出端上通过气缸连接件连接有双排梳子件,双排梳子件位于导料挡板的端部。
5、为了实现对产品的精准定位,从而确保产品可以精准的放入泡沫盒内,进一步地,精定位机构包括精定位安装座,精定位安装座的上方设有若干个等间距设置的定位块,且精定位安装座的上方还设有活动的鱼骨块,精定位安装座一端的上方安装有长度定位气缸,长度定位气缸的输出端与鱼骨块连接,精定位安装座的底部安装有宽度定位气缸,宽度定位气缸的输出端上连接有位于鱼骨块两侧的宽度定位板。
6、为了实现对产品的变距以及搬运,进一步地,变距吸取机构包括变距吸取安装座,变距吸取安装座的上方安装有变距吸取横移模组,变距吸取横移模组的输出端上连接有横移板,横移板上安装有变距吸取升降气缸,变距吸取升降气缸的输出端上连接有升降板,升降板上连接有变距组件;变距组件包括变距安装座,变距安装座安装在升降板上,变距安装座上连接有两根滑杆,两根滑杆上滑动有若干个吸嘴安装座,若干个吸嘴安装座之间通过连接件连接,吸嘴安装座上安装有真空吸嘴,升降板上还安装有变距气缸,变距气缸的输出端与位于端部的吸嘴安装座连接。
7、为了将定位后的产品搬运至泡沫盒内,进一步地,横移取放机构包括取放横移模组,取放横移模组的输出端上连接有取放安装座,取放安装座的侧面上滑动有取放升降板,取放安装座的上端连接有取放升降气缸,取放升降气缸的输出端与取放升降板连接,取放升降板上连接有取放连接板,取放连接板侧面的下端连接有钣金罩,取放连接板的侧面上还连接有磁铁升降气缸,磁铁升降气缸的输出端上连接有连接板,连接板的下方连接有位于钣金罩内部的磁铁。
8、为了实现对空泡沫盒以及满料泡沫盒的自动搬运,进一步地,泡沫盒移栽机构包括两个平行设置的直线导轨,两个直线导轨之间设有同步带模组,两个直线导轨的滑块上连接有移动座,移动座的上方连接有托板,托板的上方连接有挡条,且托板上还设有活动的与挡条相对应的夹板,托板的底部安装有夹板气缸,夹板气缸的输出端与夹板连接。
9、为了实现对空泡沫盒的精准定位,进一步地,泡沫盒定位机构包括定位机构支撑座,定位机构支撑座的前侧连接有导向钣金,定位机构支撑座的两侧均连接有气缸安装板,气缸安装板的下方安装有托举气缸,托举气缸的输出端上连接有托举块,气缸安装板的上方安装有定位气缸,定位气缸的输出端上连接有泡沫盒定位块,定位机构支撑座上方的后侧连接有侧挡钣金,定位机构支撑座的前侧连接有锁板气缸,锁板气缸的输出端上连接有侧锁板。
10、为了存放空泡沫盒以及空泡沫盒的投放,进一步地,空泡沫盒料仓包括空料仓座,空料仓座的两侧分别连接有料仓气缸安装板,料仓气缸安装板的上方安装有泡沫盒夹紧气缸,泡沫盒夹紧气缸的输出端上连接有泡沫盒夹紧块,料仓气缸安装板的下方安装有泡沫盒托举气缸,泡沫盒托举气缸的输出端上连接有泡沫盒托举板;为了存放满料泡沫盒,进一步地,满泡沫盒料仓包括满料仓座,满料仓座的两侧分别连接有满料仓托料气缸,满料仓托料气缸的输出端上连接有满料仓托料板。
11、为了对空泡沫盒以及满料泡沫盒进行升降操作,进一步地,气缸顶升机构和步进丝杆顶升机构均包括顶升组件,顶升组件包括升降块,升降块上方的四个拐角处分别连接有光轴,位于短边侧的两个光轴的上端连接有顶升块,升降块上还滑动有四根导向杆,导向杆的上端连接有上连接板,导向杆的下端连接有下连接板,其中,气缸顶升机构还包括顶升气缸,顶升气缸安装在下连接板上,顶升气缸的输出端与升降块连接,步进丝杆顶升机构还包括伺服电机,伺服电机的输出端上连接有螺杆,螺杆的两端分别与上连接板和下连接板转动连接,螺杆上啮合有螺母,螺母与升降块固定连接。
12、在本发明中进一步地,所述的一种高速自动装泡沫盒机的实现方法,包括以下步骤:
13、(一)、产品经进料皮带输送至分料皮带上双排梳子件的一个排槽中,当此排槽堆满产品时,工位切换气缸带动双排梳子件切换一个工位,使得另一个排槽也装满产品;
14、(二)、变距吸取升降气缸下降,真空吸嘴将双排梳子件内的产品吸住,然后变距吸取升降气缸上升,变距气缸推出,使得产品与产品之间等间距分离,完成变距;
15、(三)、变距吸取横移模组带动真空吸嘴移动至精定位机构的上方,变距吸取升降气缸下降,真空吸嘴将产品放置进鱼骨块内,此时,变距吸取机构复位,等待下一次取料,宽度定位气缸缩回,对产品宽度方向进行定位,然后长度定位气缸带动鱼骨块缩回,完成产品长度方向的定位;
16、(四)、同步带模组带动托板移动至空泡沫盒料仓的下方,泡沫盒夹紧气缸动作带动泡沫盒夹紧块伸出,将上层的泡沫盒夹住,然后泡沫盒托举气缸带动泡沫盒托举板缩回,然后空泡沫盒料仓底部的步进丝杆顶升机构缩回,使得底部的空泡沫盒落入至托板上,然后同步带模组带动托板移动至泡沫盒定位机构的下方,泡沫盒定位机构下方的步进丝杆顶升机构带动满料泡沫盒下降到托板上的空工位上,然后同步带模组带动托板移动一个工位,使空泡沫盒正对泡沫盒定位机构,泡沫盒定位机构下方的步进丝杆顶升机构将空泡沫盒顶升至摆盘工位,托举气缸带动托举块伸出,托住空泡沫盒,定位气缸和锁板气缸推出,对空托盘进行定位;
17、(五)、取放横移模组带动钣金罩移动至精定位机构的上方,取放升降气缸伸出,带动钣金罩贴到产品的表面,然后磁铁升降气缸伸出,使磁铁下降与钣金罩贴合,产品在磁吸力的作用下被吸附在钣金罩的下侧;
18、(六)、取放横移模组带动钣金罩移动至泡沫盒定位机构的上方,取放升降气缸伸出,磁铁升降气缸复位,将产品放置在泡沫盒内,完成产品的放料。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明的分料皮带通过工位切换气缸带动双排梳子件进行两个工位之间的切换,从而实现自动将输送过来的产品按照设定的数量进行两列排列;
21、2、本发明的精定位机构实现了对产品的精准定位,从而确保产品可以精准的放入泡沫盒内;
22、3、本发明的变距吸取机构实现了对产品的变距以及搬运,解决了传统泡沫盒机需要将产品一个一个隔开后再整体搬运到泡沫盒中导致无法做到高速的问题;
23、4、本发明的泡沫盒移栽机构实现了对空泡沫盒以及满料泡沫盒的自动搬运;
24、5、本发明的泡沫盒定位机构实现了对空泡沫盒的精准定位;
25、6、本发明实现了产品的自动排列、变距、精定位以及搬运,还实现了空泡沫盒的精定位,空泡沫盒以及满料泡沫盒的存放和搬运,有效的提高了磁芯产品的装泡沫盒效率。
- 还没有人留言评论。精彩留言会获得点赞!