一种栈板自动拆垛设备的制作方法
本发明涉及物流设备,更具体地说,涉及一种栈板自动拆垛设备。
背景技术:
1、栈板是使静态货物转变为动态货物的媒介物,一种活动的载货托盘,用于货物的装卸、储存和运输。目前,在航空物流领域内,栈板上装载多个质量和尺寸不等的货物,并与叉车配套使用,叉车将栈板运输至物流集散地后,人工对栈板上的货物进行拆垛,此货物拆垛方式费时费力,影响拆垛的效率。
2、综上所述,如何提供一种能够提高拆垛效率的栈板自动拆垛设备,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种栈板自动拆垛设备,该设备能够降低人工劳动强度,实现栈板上货物自动拆垛,进而提高拆垛效率。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种栈板自动拆垛设备,包括:
4、平台,用于承载栈板;
5、抓取机器人,用于抓取所述栈板上的货物并将其放置在运输带上,所述抓取机器人设于所述平台的一侧;
6、位置测量装置,用于自上而下逐一测量所述栈板上的每个货物位置,所述位置测量装置包括支撑架、升降机构和3d视觉装置,所述支撑架靠近所述平台设置,所述3d视觉装置设于所述平台的上方,所述升降机构连接于所述支撑架和所述3d视觉装置之间,以驱动所述3d视觉装置沿所述支撑架上下移动;
7、控制装置,信号连接于所述抓取机器人、所述升降机构和所述3d视觉装置。
8、优选的,所述升降机构包括滑轨、驱动电机和支撑杆,所述滑轨设于所述支撑架上的、靠近所述平台的一侧,所述支撑杆的一端通过驱动电机可滑动设于所述滑轨中、另一端与所述3d视觉装置连接。
9、优选的,所述位置测量装置还包括固定架,所述固定架包括固定框架和若干个支撑件,所述支撑架的底部固设于所述固定框架上,若干个支撑件连接于所述固定框架与地面之间,且若干个所述支撑件两两对称设置。
10、优选的,所述支撑架为u形架,所述u形架的开口端固设于所述固定框架上,所述u形架的闭口端与所述地面之间设有爬梯。
11、优选的,所述抓取机器人的底部设有安装支架,所述安装支架为高度可调节结构。
12、优选的,所述抓取机器人包括机器人本体和机器人抓手,所述机器人本体设于所述安装支架上,所述机器人抓手的一端可转动地连接于所述机器人本体、另一端设有真空吸具,用于吸附待抓取的所述货物。
13、优选的,所述平台的侧边缘设有无动力滚筒输送架,所述无动力滚筒输送架包括滚筒框架和若干个无动力滚筒组件,若干个所述无动力滚筒组件沿所述滚筒框架的延伸方向等间隔设于所述滚筒框架中。
14、优选的,所述抓取机器人设为若干个,若干个所述抓取机器人两两对称设于所述平台的两侧。
15、优选的,还包括安全护栏,所述安全护栏沿周向围设于所述平台、所述抓取机器人和所述位置测量装置的周围,且所述安全护栏上的、靠近所述平台的一侧设有进出口。
16、相较于上述背景技术,本发明提供的栈板自动拆垛设备使用时,整体设备安装在物流集散地处,并将承载栈板的平台靠近运输带的下方设置,栈板安装在平台上,控制装置控制升降机构驱动3d视觉装置沿支撑架移动至栈板上的货物最高点,3d视觉装置测量栈板上的最高货物位置并传递给控制装置,控制装置根据获取的最高货物位置数据控制抓取机器人精准抓取货物,并将最高货物放置在运输带上,即实现拆卸栈板上的最上层货物,此时,栈板上的货物最高点降低,控制装置控制升降机构驱动3d视觉装置沿支撑架向下移动,控制装置重复上述操作,以通过抓取机器人精准抓取栈板上的最高货物并将其放置在运输带上,控制装置继续控制升降机构驱动3d视觉装置向下移动,直至移动到栈板上的货物最低点,完成栈板上的货物拆垛作业。
17、因而,控制装置控制升降机构驱动3d视觉装置自上而下移动,实现3d视觉装置从栈板上的货物最高点移动至货物最低点,使得3d视觉装置逐一测量栈板上的每个货物位置并传递给抓取机器人,抓取机器人根据获取每个货物位置数据抓取货物并将其放置在运输带,从而实现栈板上的货物自动化拆垛,提高拆垛效率。
技术特征:
1.一种栈板自动拆垛设备,其特征在于,包括:
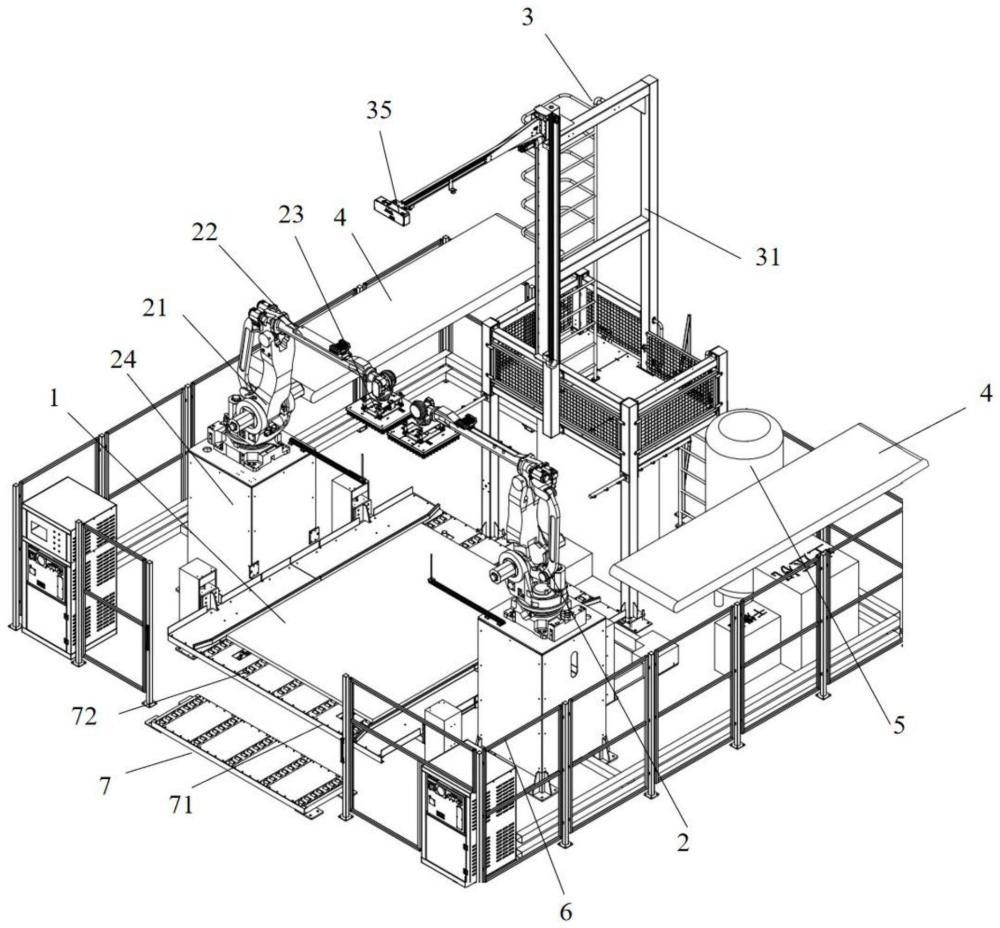
2.根据权利要求1所述的栈板自动拆垛设备,其特征在于,所述升降机构包括滑轨(32)、驱动电机(33)和支撑杆(34),所述滑轨(32)设于所述支撑架(31)上的、靠近所述平台(1)的一侧,所述支撑杆(34)的一端通过驱动电机(33)可滑动设于所述滑轨(32)中、另一端与所述3d视觉装置(35)连接。
3.根据权利要求2所述的栈板自动拆垛设备,其特征在于,所述位置测量装置(3)还包括固定架,所述固定架包括固定框架(36)和若干个支撑件(37),所述支撑架(31)的底部固设于所述固定框架(36)上,若干个支撑件(37)连接于所述固定框架(36)与地面之间,且若干个所述支撑件(37)两两对称设置。
4.根据权利要求3所述的栈板自动拆垛设备,其特征在于,所述支撑架(31)为u形架,所述u形架的开口端固设于所述固定框架(36)上,所述u形架的闭口端与所述地面之间设有爬梯(38)。
5.根据权利要求1至4任一项所述的栈板自动拆垛设备,其特征在于,所述抓取机器人(2)的底部设有安装支架(24),所述安装支架(24)为高度可调节结构。
6.根据权利要求5所述的栈板自动拆垛设备,其特征在于,所述抓取机器人(2)包括机器人本体(21)和机器人抓手(22),所述机器人本体(21)设于所述安装支架(24)上,所述机器人抓手(22)的一端可转动地连接于所述机器人本体(21)、另一端设有真空吸具(23),用于吸附待抓取的所述货物。
7.根据权利要求1至4任一项所述的栈板自动拆垛设备,其特征在于,所述平台(1)的侧边缘设有无动力滚筒输送架(7),所述无动力滚筒输送架(7)包括滚筒框架(71)和若干个无动力滚筒组件(72),若干个所述无动力滚筒组件(72)沿所述滚筒框架(71)的延伸方向等间隔设于所述滚筒框架(71)中。
8.根据权利要求1至4任一项所述的栈板自动拆垛设备,其特征在于,所述抓取机器人(2)设为若干个,若干个所述抓取机器人(2)两两对称设于所述平台(1)的两侧。
9.根据权利要求1至4任一项所述的栈板自动拆垛设备,其特征在于,还包括安全护栏(6),所述安全护栏(6)沿周向围设于所述平台(1)、所述抓取机器人(2)和所述位置测量装置(3)的周围,且所述安全护栏(6)上的、靠近所述平台(1)的一侧设有进出口。
技术总结
本发明公开了一种栈板自动拆垛设备,包括平台,用于承载栈板;抓取机器人,用于抓取栈板上的货物并将其放置在运输带上,抓取机器人设于平台的一侧;位置测量装置,用于自上而下逐一测量栈板上的每个货物位置,位置测量装置包括支撑架、升降机构和3D视觉装置,支撑架靠近平台设置,3D视觉装置设于平台的上方,升降机构连接于支撑架和3D视觉装置之间,以驱动3D视觉装置沿支撑架上下移动;控制装置,信号连接于抓取机器人、升降机构和3D视觉装置。本申请能够降低人工劳动强度,实现栈板上货物自动拆垛,进而提高拆垛效率。
技术研发人员:李孟龙,邓鹏,曹辉,吴杰,赵光博,王赫
受保护的技术使用者:安徽省配天机器人集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!