一种新型可变路径取放料装置
本发明涉及卫生用品包装,具体涉及一种新型可变路径取放料装置。
背景技术:
1、卫生巾产品的包装成型要经过理片、堆垛以及最后的包装环节。现有卫生巾产品的包装速度较低,在50-90包/min。由于理片装置的理片速度在1200片/min,卫生巾产品可顺利进行堆垛,但由于成垛卫生巾产品需要经过整形、换向排出,造成成垛的卫生巾产品在进入包装机之前积攒、堵塞,成为了限制卫生巾产品包装速度的主要原因之一。
2、随着包装行业的自动化发展,卫生巾产品由开始的人工整理成垛产品放置在包装机的入料部分,发展成衔接前部的堆垛装置,将成垛的卫生巾产品经过转向后推入到包装机入料部分。但随着理片机以及堆垛速度的不断提高,卫生巾产品在进入包装机前的堵塞问题尤为突出。因此发明一种全自动产品取料机构十分必要,可以有效提高整形、换向排出的速度,解决当下产品在排出堆垛后的堵塞问题。
技术实现思路
1、本发明目的在于提供一种新型可变路径取放料装置,堆垛机将成垛的卫生巾产品排出到待取料部分上,通过待取料部分的滑移锁紧组件对成垛的卫生巾产品进行整理,随后左路取放料臂通过伺服电机的驱动沿着避让导轨到达设定的产品取料位置,z轴伸缩气缸带动机械爪向下运动到达产品位置,绕x轴旋转气缸使机械爪转动,同时机械爪中的导轨气缸使夹爪回缩,从而抓取产品。随后伺服电机驱动左路取放料臂沿着避让导轨返回,在返回过程中,z轴伸缩气缸带动机械爪返回原位,绕x轴旋转气缸使机械爪转动,实现产品的换向,当到达物料送出部分时,机械爪中的导轨气缸使夹爪伸出,产品放置在包装机入料部分中;在左路取放料臂抓取产品返回的同时,伺服电机和气缸控制右路取放料臂重复操作,为了提高产品的换向取放速度,采用取放料臂交替工作;为了防止左右取放料臂在交替过程中机械爪发生干涉,设置了避让导轨部分,使其各自在进行接放料中沿着避让轨迹运动。此发明使得产品被堆垛机构排出后,进入整形取放料机构时不会产生堵塞,并且机构交替机构不会发生干涉,可以提高卫生巾包装效率。
2、本发明的目的可以通过以下技术方案实现:
3、一种新型可变路径取放料装置,包括包括动力部分、取放料臂部分、避让导轨部分、待取料部分、支架部分、物料送出部分;取放料臂部分包括左路取放料臂组件和右路取放料臂组件,左路取放料臂组件和右路取放料臂组件交替夹取物料至物料送出部分,左路取放料臂部分包括同步带压板组件、y轴滑轨组件、x轴滑轨组件、凸轮杆组件、z轴伸缩气缸组件、绕x轴旋转气缸组件和机械爪组件,机械爪组件包括导导轨气缸组件、夹爪;同步带压板组件夹紧安装在同步带组件上,连接y轴滑轨组件,y轴滑轨组件中滑轨固定在支架部分,通过同步带传动带动同步带压板组件来带动y轴滑轨组件运动,x轴滑轨组件是固定在y轴滑轨组件下方的,跟随y轴滑轨组件做y轴方向移动同时也跟随凸轮杆组件做x轴方向移动,凸轮杆组件安装在x轴滑轨组件下方,跟随x轴滑轨组件一起做y轴移动,凸轮杆组件在避让导轨中做y轴移动与x轴的移动,z轴伸缩气缸组件,固定在凸轮杆组件上,跟随凸轮杆组件做x轴和y轴的运动,绕x轴旋转气缸组件固定在z轴伸缩气缸组件的下方,跟随z轴伸缩气缸组件移动,同时会被z轴伸缩气缸组件推动向下或者向上移动。
4、作为本发明进一步的方案:机械爪组件包括导轨气缸组件以及导轨气缸组件上运动的夹爪。
5、作为本发明进一步的方案:动力部分包括包括电机组件和同步带组件,电机组件位于左、右路取放料臂组件之上,固定在支架部分,安装位置成对称分布,用以带动位于左、右路同步带组件,同步带组件随之带动左、右路取放料臂组件进行y轴移动,完成对已夹取物料的运输。
6、作为本发明进一步的方案:还包括所述的支架部分包括支架和y轴导轨,支架上固定有y轴导轨、动力部分、取放料臂部分、避让导轨部分、待取料部分。
7、作为本发明进一步的方案:避让导轨部分包括左路避让导轨部分和右路避让导轨部分,为凸轮杆组件提供运动路线,左路避让导轨部分和右路避让导轨部分相同,安装位置呈对称分布。
8、作为本发明进一步的方案:待取料部分包括滑移锁紧组件和产品夹片组件,滑移锁紧组件分为左路滑移组件和右路滑移组件,左路滑移组件和右路滑移组件镜像对称安装在承接板上,滑移锁紧组件推送产品夹片组件,产品夹片组件固定在滑移锁紧组件上,对物料进行整理。
9、作为本发明进一步的方案:所述支架部分的一侧设置有物料送出部分,取放料臂部分到达物料送出部分上方时,z轴伸缩气缸组件放下机械爪组件,爪夹张开放下物料。
10、作为本发明进一步的方案:包括以下步骤:
11、s101:左路取放料臂组件和右路取放料臂组件到达待取料部分时,机械爪组件对物料进行夹取。
12、s102:z轴伸缩气缸组件抬起机械爪组件,绕x轴旋转气缸旋转机械爪组件,使机械爪组件处于竖直状态,动力部分通过同步带组件带动取放料臂部分做y轴方向运动。
13、s103:取放料臂部分在做y轴运动过程中会出现左路与右路取放料臂组件交汇的情况,中间通过避让导轨部分防止左路、右路取放料臂组件在中间交汇处相撞。
14、s104:取放料臂部分到达物料送出部分上方时,z轴伸缩气缸组件放下机械爪组件,爪夹张开放下物料,z轴伸缩气缸组件向上抬起机械爪组件,绕x轴旋转气缸旋转机械爪组件,完成一次产品入料。
15、作为本发明进一步的方案:当物料处于待取料部分时,左路取放料臂组件和右路取放料臂组件重复s101-s104。
16、本发明的有益效果:
17、1.本发明中,将堆垛后的产品首先经行整形压缩,利用旋转气缸以及抓夹对产品进行取放以及换向,满足成垛的产品最终放置在包装机入料机构中不同位姿的要求。
18、2.利用两个对称放置的取放料臂,交替的对产品进行换向以及取放料,提高了产品的取料速度,有效缓解了现有卫生巾产品的堵塞问题;为了减小装置所占空间,将左右路的机械爪沿着避让轨迹工作,使产品不发生干涉,机构各部件之间可以独立运动。
19、3.本发明通过对不同电机组件和气缸的控制可以将产品精确的夹取放置到目标位置,两路交替进行夹取放置产品,可及时将物料转移工位,并输送至包装机物料送出部分,有效避免产品发生堵塞。
技术特征:
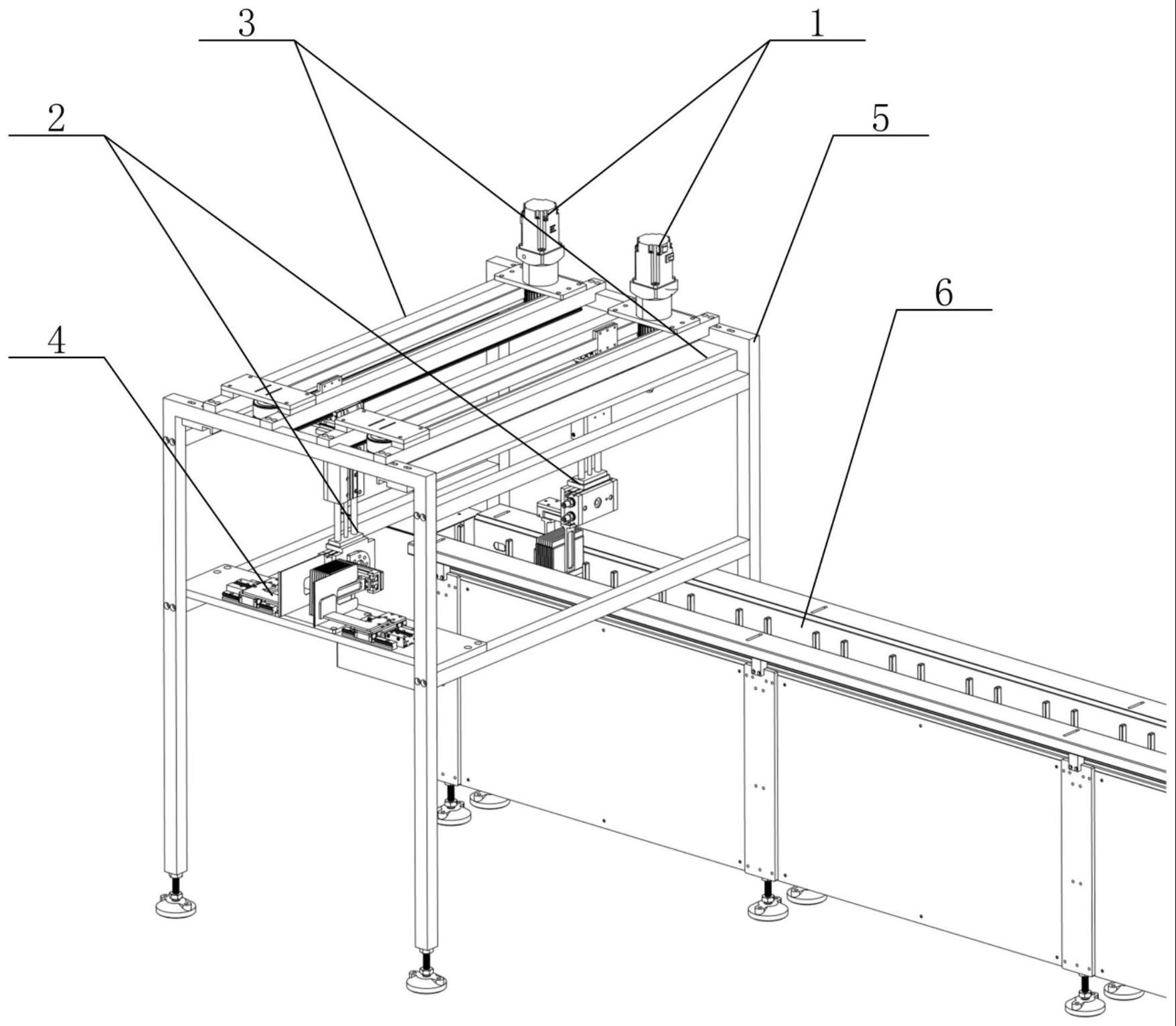
1.一种新型可变路径取放料装置,包括取放料臂部分(2)以及驱动取放料臂部分(2)运动的动力部分(1),其特征在于,取放料臂部分(2)包括结构相同的左路取放料臂组件(21)和右路取放料臂组件(22),左路取放料臂组件(21)和右路取放料臂组件(22)交替夹取物料至物料送出部分(6),左路取放料臂组件(21)包括同步带压板组件(211),同步带压板组件(211)夹紧安装在同步带组件(12)上,连接y轴滑轨组件(212),x轴滑轨组件(213)是固定在y轴滑轨组件(212)下方的,凸轮杆组件(214)安装在x轴滑轨组件(213)下方,z轴伸缩气缸组件(215)固定在凸轮杆组件(214)上,z轴伸缩气缸组件(215)上安装有绕x轴旋转气缸组件(216),绕x轴旋转气缸组件(216)上安装有机械爪组件(217)。
2.根据权利要求1所述的一种新型可变路径取放料装置,其特征在于,机械爪组件(217)包括导轨气缸组件(2171)以及导轨气缸组件(2171)上运动的夹爪(2172)。
3.根据权利要求1所述的一种新型可变路径取放料装置,其特征在于,所述动力部分(1)包括电机组件(11)和同步带组件(12),电机组件(11)位于左路取放料臂组件(21)、右路取放料臂组件(22)之上,固定在支架部分(5),安装位置成对称分布,用以带动位于左、右路的同步带组件(12),同步带组件(12)随之带动左路取放料臂组件(21)、右路取放料臂组件(22)进行y轴移动,完成对已夹取物料的运输。
4.根据权利要求1所述的一种新型可变路径取放料装置,其特征在于,还包括支架部分(5),支架部分(5)包括支架(51)和y轴导轨(52),支架(51)上固定有y轴导轨(52)、动力部分(1)、取放料臂部分(2)、避让导轨部分(3)、待取料部分(4)。
5.根据权利要求4所述的一种新型可变路径取放料装置,其特征在于,避让导轨部分(3)包括左路避让导轨部分(31)和右路避让导轨部分(32),为凸轮杆组件(214)提供运动路线,左路避让导轨部分(31)和右路避让导轨部分(32)结构相同,安装位置呈对称分布。
6.根据权利要求4所述的一种新型可变路径取放料装置,其特征在于,待取料部分(4)包括滑移锁紧组件(41)和产品夹片组件(42),滑移锁紧组件(41)分为左路滑移组件(411)和右路滑移组件(412),左路滑移组件(411)和右路滑移组件(412)镜像对称安装在承接板上,滑移锁紧组件(41)推送产品夹片组件(42),产品夹片组件(42)固定在滑移锁紧组件(41)上,对物料进行整理。
7.根据权利要求4所述的一种新型可变路径取放料装置,其特征在于,所述支架部分(5)的一侧设置有物料送出部分(6),取放料臂部分(2)到达物料送出部分(6)上方时,z轴伸缩气缸组件(215)放下机械爪组件(217),夹爪(2172)张开放下物料。
8.根据权利要求1-7任一项所述的一种新型可变路径取放料装置,其特征在于,包括以下步骤:
9.根据权利要求8所述的一种新型可变路径取放料装置,其特征在于,当物料处于待取料部分(4)时,左路取放料臂组件(21)和右路取放料臂组件(22)重复s101-s104。
技术总结
本发明公开了一种新型可变路径取放料装置,属于卫生用品包装机械技术领域,新型可变路径取放料装置隶属于包装机械分支中的理片入料部分,包括动力部分、取放料臂部分、避让导轨部分、待取料部分、支架部分、物料送出部分;利用两个对称放置的取放料臂,交替的对产品进行换向以及取放料,提高了产品的取料速度,有效缓解了现有卫生巾产品的堵塞问题;为了减小装置所占空间,将左右路的机械爪沿着避让轨迹工作,使产品不发生干涉,机构各部件之间可以独立运动。
技术研发人员:刘涛,胡鹏,白凯凯,刘庆运
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!