水下机器人用绕线装置
本发明涉及绕线装置,具体涉及一种水下机器人用绕线装置。
背景技术:
1、水下机器人在进行水下作业或水下性能测试过程中多采用带线缆作业,线缆一端与水下机器人连接,另一端连接水面平台上的工作计算机,以实现水面水下的信息传递;由于水下机器人工作/测试过程中处于运动状态,所以中间的连接线缆必须具备足够的长度且需要动态进行收放,为了保证中间连接线缆的收/放及数据传输的便捷,目前多采用线滚与滑环配合的方式实现通讯线缆的收/放作业,这种方式在一定层面上解决了通讯线缆的收/放问题,但是市面上的产品仍存在以下不足:1)线缆收放装置整体结构设计粗犷,运动件与固定件之间尺寸间隙大,容易卡线;2)线缆收放装置在绕线时缺少一个排线机构,即线缆在被收卷到绕线轮上的过程中,线缆需要人工进行排线,从而存在效率低和工作人员劳动强度大的缺点。
技术实现思路
1、针对现有技术的不足,本发明提供一种水下机器人用绕线装置,其在对线缆进行收卷时,在排线机构的作用下,排线机构能够对线缆进行引导,从而能够有效避免卡线情况的出现,且能够使得线缆均匀地被卷绕到绕线轮上,即无需通过人工的方式进行排线,进而能够提高对线缆的收卷效率,以及能够降低工作人员的劳动强度。
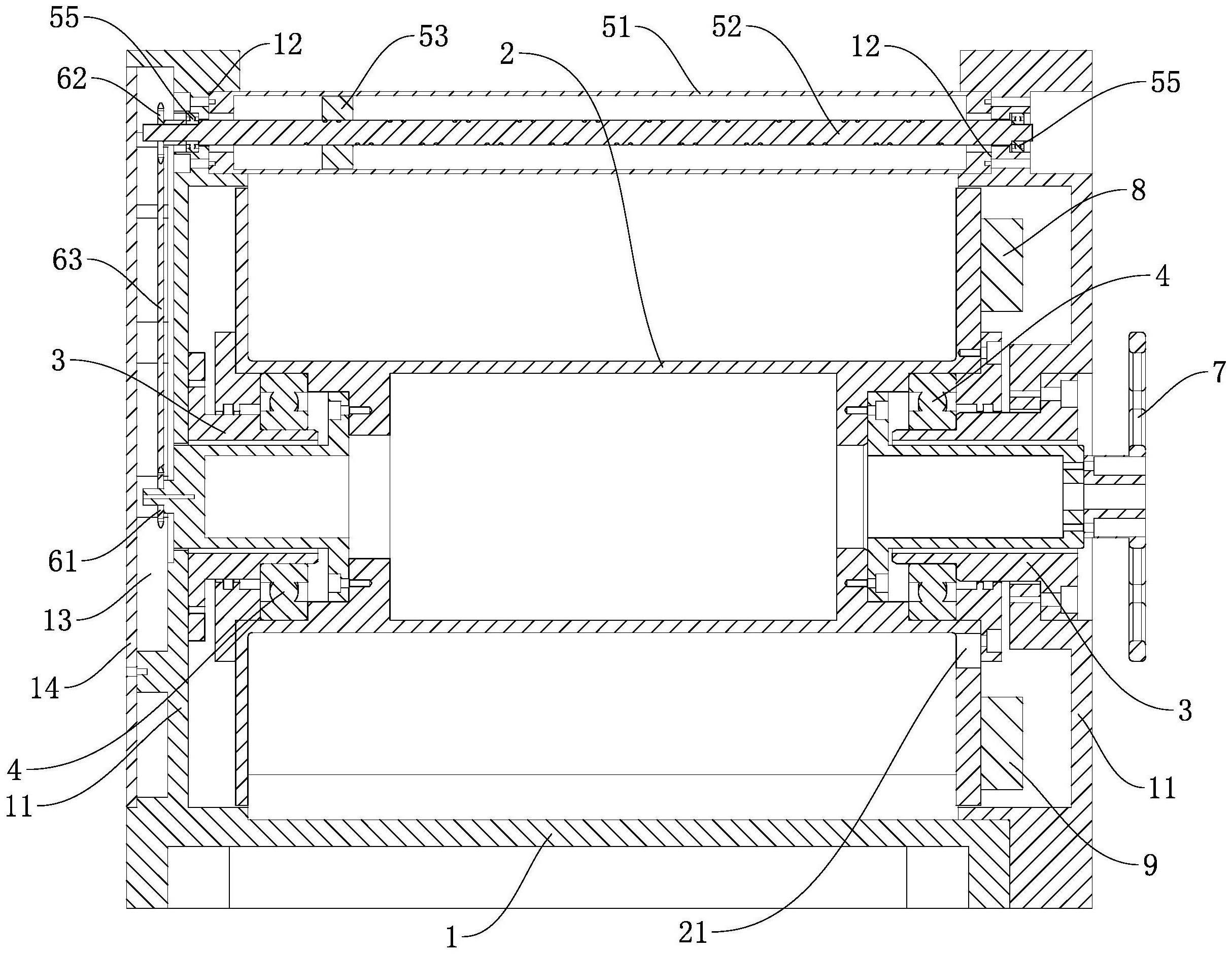
2、本发明的水下机器人用绕线装置,包括底座、绕线轮和排线机构,底座的左右两端均连接有支架,绕线轮和排线机构均设置在两个支架之间,绕线轮的两端均分别插入在对应侧的支架中并与对应侧的支架转动连接;排线机构位于绕线轮的上方,排线机构的两端分别与对应侧的支架连接,排线机构与绕线轮的一端传动连接,绕线轮的另一端连接有用于驱动绕线轮转动的驱动单元,当驱动单元驱动绕线轮转动时,排线机构用于引导线缆沿绕线轮的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮上。
3、本发明在对线缆进行收卷时,在排线机构的作用下,排线机构能够对线缆进行引导,从而能够有效避免卡线情况的出现,且能够使得线缆均匀地被卷绕到绕线轮上,即无需通过人工的方式进行排线,进而能够提高对线缆的收卷效率,以及能够降低工作人员的劳动强度。
4、本发明的水下机器人用绕线装置,其中,两个支架上均固定有支撑轴,两个支撑轴的内端部分别插入在绕线轮的其中一端中,绕线轮的两端与对应侧的支撑轴之间均嵌装有第一轴承,绕线轮通过两个第一轴承与两个支撑轴转动连接;通过采用这种结构后,绕线轮能够通过两个第一轴承和两个支撑轴可靠地与两个支架转动连接在一起。
5、本发明的水下机器人用绕线装置,其中,排线机构包括导向套、往复丝杆、丝杆螺母和套环,导向套的两端分别与其中一个支架的内侧固定,往复丝杆活动穿设在导向套中,往复丝杆的两端均伸出于导向套外并分别与对应侧的支架转动连接,往复丝杆的一端通过传动机构与绕线轮的一端传动连接,丝杆螺母设置在导向套的内部且丝杆螺母套设在往复丝杆上,导向套的侧壁上设置有沿导向套的轴向方向延伸的滑槽,套环的外壁上固定有滑杆,滑杆远离套环的一端穿设在滑槽中并可沿滑槽滑动,滑杆远离套环的一端与丝杆螺母的外壁固定,套环用于供线缆穿过,当绕线轮通过传动机构带动往复丝杆转动时,往复丝杆用于带动丝杆螺母以及套环沿绕线轮的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮上;通过采用这种结构的排线机构后,当绕线轮转动时,在传动机构的作用下,能够带动往复丝杆同步转动,即当绕线轮通过传动机构带动往复丝杆转动时,往复丝杆能够带动丝杆螺母以及套环沿绕线轮的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮上。
6、本发明的水下机器人用绕线装置,其中,每个支架的内侧均设置有插槽,导向套的两端分别插入在其中一个插槽中并与对应侧的支架固定;通过采用这种结构后,导向套的两端能够分别可靠地与其中一个支架的内侧固定在一起。
7、本发明的水下机器人用绕线装置,其中,往复丝杆的两端均分别通过一个第二轴承与对应侧的支架转动连接;通过采用这种结构后,往复丝杆的两端均能够通过对应侧的第二轴承可靠地与对应侧的支架转动连接在一起。
8、本发明的水下机器人用绕线装置,其中,位于底座左侧的支架的外壁上设置有用于容纳传动机构的凹腔,凹腔的开口处固定有用于封闭凹腔的盖板;传动机构包括主动链轮、从动链轮和链条,主动链轮与位于绕线轮左端处的支撑轴的外端部同轴固定,从动链轮同轴固定在往复丝杆的一端上,从动链轮通过链条与主动链轮传动连接;通过采用这种传动机构后,在主动链轮、链条和从动链轮的作用下,往复丝杆能够可靠地与绕线轮传动连接在一起,即当绕线轮转动时,绕线轮能够经主动链轮、链条和从动链轮可靠地带动往复丝杆同步转动。
9、本发明的水下机器人用绕线装置,其中,驱动单元为转动手轮或电驱动机构,位于绕线轮右端处的支撑轴的外端部与转动手轮同轴固定或与电驱动机构的驱动端同轴固定;当采用转动手轮作为驱动单元后,用户可通过转动手轮手动转动绕线轮,当采用电驱动机构作为驱动单元后,电驱动机构能够通过机械化的方式驱动绕线轮转动,上述电驱动机构可以是伺服电机等。
10、本发明的水下机器人用绕线装置,其中,绕线轮的其中一端固定有数据收发器和蓄电池,数据收发器与蓄电池电连接,线缆的一端穿过位于绕线轮端部上的线孔后与数据收发器电连接,线缆的另一端与水下机器人电连接;通过采用这种结构后,蓄电池能够对数据收发器进行供电,当水下机器人通过线缆将信号发送至数据收发器后,数据收发器能够通过其内置的无线信号收发单元将信号发送给控制计算机,同理,控制计算机可通过无线的方式将需要发送的控制信号发送给数据收发器,数据收发器则能够通过线缆将控制信号发送给水下机器人。
技术特征:
1.一种水下机器人用绕线装置,其特征在于:包括底座(1)、绕线轮(2)和排线机构,所述底座(1)的左右两端均连接有支架(11),所述绕线轮(2)和排线机构均设置在两个所述支架(11)之间,所述绕线轮(2)的两端均分别插入在对应侧的支架(11)中并与对应侧的支架(11)转动连接;所述排线机构位于所述绕线轮(2)的上方,所述排线机构的两端分别与对应侧的支架(11)连接,所述排线机构与绕线轮(2)的一端传动连接,所述绕线轮(2)的另一端连接有用于驱动绕线轮(2)转动的驱动单元,当驱动单元驱动绕线轮(2)转动时,所述排线机构用于引导线缆沿绕线轮(2)的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮(2)上。
2.根据权利要求1所述的水下机器人用绕线装置,其特征在于,两个所述支架(11)上均固定有支撑轴(3),两个所述支撑轴(3)的内端部分别插入在所述绕线轮(2)的其中一端中,所述绕线轮(2)的两端与对应侧的支撑轴(3)之间均嵌装有第一轴承(4),所述绕线轮(2)通过两个第一轴承(4)与两个所述支撑轴(3)转动连接。
3.根据权利要求2所述的水下机器人用绕线装置,其特征在于,所述排线机构包括导向套(51)、往复丝杆(52)、丝杆螺母(53)和套环(54),所述导向套(51)的两端分别与其中一个支架(11)的内侧固定,所述往复丝杆(52)活动穿设在所述导向套(51)中,所述往复丝杆(52)的两端均伸出于导向套(51)外并分别与对应侧的支架(11)转动连接,所述往复丝杆(52)的一端通过传动机构与绕线轮(2)的一端传动连接,所述丝杆螺母(53)设置在导向套(51)的内部且丝杆螺母(53)套设在往复丝杆(52)上,所述导向套(51)的侧壁上设置有沿导向套(51)的轴向方向延伸的滑槽(511),所述套环(54)的外壁上固定有滑杆(541),所述滑杆(541)远离套环(54)的一端穿设在滑槽(511)中并可沿滑槽(511)滑动,所述滑杆(541)远离套环(54)的一端与丝杆螺母(53)的外壁固定,所述套环(54)用于供线缆穿过,当绕线轮(2)通过传动机构带动往复丝杆(52)转动时,所述往复丝杆(52)用于带动丝杆螺母(53)以及套环(54)沿绕线轮(2)的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮(2)上。
4.根据权利要求3所述的水下机器人用绕线装置,其特征在于,每个所述支架(11)的内侧均设置有插槽(12),所述导向套(51)的两端分别插入在其中一个所述插槽(12)中并与对应侧的支架(11)固定。
5.根据权利要求3所述的水下机器人用绕线装置,其特征在于,所述往复丝杆(52)的两端均分别通过一个第二轴承(55)与对应侧的支架(11)转动连接。
6.根据权利要求3所述的水下机器人用绕线装置,其特征在于,位于所述底座(1)左侧的支架(11)的外壁上设置有用于容纳所述传动机构的凹腔(13),所述凹腔(13)的开口处固定有用于封闭所述凹腔(13)的盖板(14);所述传动机构包括主动链轮(61)、从动链轮(62)和链条(63),所述主动链轮(61)与位于绕线轮(2)左端处的支撑轴(3)的外端部同轴固定,所述从动链轮(62)同轴固定在往复丝杆(52)的一端上,所述从动链轮(62)通过链条(63)与主动链轮(61)传动连接。
7.根据权利要求2-6任一项所述的水下机器人用绕线装置,其特征在于,所述驱动单元为转动手轮(7)或电驱动机构,位于所述绕线轮(2)右端处的支撑轴(3)的外端部与转动手轮(7)同轴固定或与电驱动机构的驱动端同轴固定。
8.根据权利要求1-6任一项所述的水下机器人用绕线装置,其特征在于,所述绕线轮(2)的其中一端固定有数据收发器(8)和蓄电池(9),所述数据收发器(8)与蓄电池(9)电连接,所述线缆的一端穿过位于绕线轮(2)端部上的线孔(21)后与数据收发器(8)电连接,所述线缆的另一端与水下机器人电连接。
技术总结
本发明揭示一种水下机器人用绕线装置,包括底座、绕线轮和排线机构,底座的左右两端均连接有支架,绕线轮和排线机构均设置在两个支架之间,绕线轮的两端均分别插入在对应侧的支架中并与对应侧的支架转动连接;排线机构位于绕线轮的上方,排线机构的两端分别与对应侧的支架连接,排线机构与绕线轮的一端传动连接,绕线轮的另一端连接有用于驱动绕线轮转动的驱动单元,当驱动单元驱动绕线轮转动时,排线机构用于引导线缆沿绕线轮的轴向方向往复移动以使线缆均匀地被卷绕到绕线轮上;本发明在对线缆进行收卷时能够有效避免卡线情况的出现,且能够使得线缆均匀地被卷绕到绕线轮上。
技术研发人员:曹勇,余应明,曹永辉,李博,郝艺伟,潘光
受保护的技术使用者:西北工业大学宁波研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!