一种基于智能机器人的翻板机系统的制作方法
本发明汽车滑撬系统,具体的说,涉及一种基于智能机器人的翻板机系统。
背景技术:
1、在汽车生产线输送系统中,由于汽车车型种类较多,为节省成本会将多种车型共用一条输送系统,实现共线生产,但因车型种类不同,定位位置不一致,滑橇定位销和支撑点数量多,滑橇会考虑支撑翻倒的方式,以前这种翻倒的方式一般考虑人工翻倒和人工将支撑起立,实现共线生产。
2、随着生产自动化需求的提高,积极推进无人化技术的研发,智能机器人和翻板机两项技术就解决了人工操作的要求,智能机器人实现滑橇支撑起立,翻板机实现将滑橇支撑翻倒。两项技术的结合彻底解决了人工操作的难点,实现了人工替代,保证了人员安全,还节省了成本。
技术实现思路
1、本发明要解决的主要技术问题是提供一种基于智能机器人的翻板机系统,适用于汽车涂装车间、焊装车间和总装车间滑撬系统的多车型共用一条生产线的场景,整体结构简单,使用方便,不能够根据不同车辆将堆拆垛支撑自动翻倒和起立,替代人工,大大降低了人员成本。
2、为解决上述技术问题,本发明提供如下技术方案:
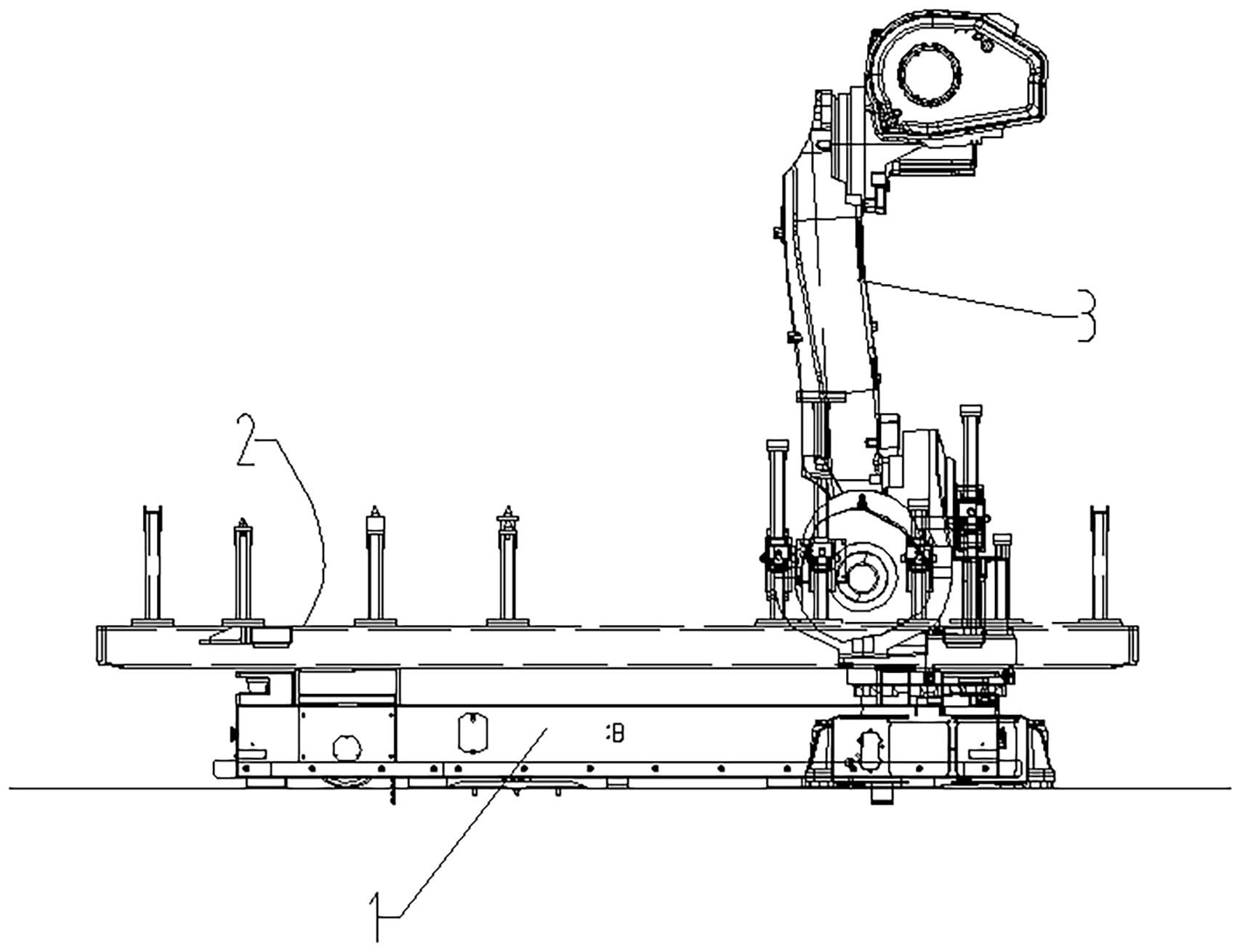
3、一种基于智能机器人的翻板机系统,包括agv智能搬运系统,所述agv智能搬运系统上滑动安装有多功能滑撬,所述agv智能搬运系统两侧位置处设置有翻板机装置,翻板机装置的位置处设置有工业机器人,多功能滑撬上靠近其一侧位置处设置有两组活动支撑装置,两组活动支撑装置为对称布设,每组活动支撑装置包括多个为间隔布设的活动支撑组件,工业机器人和翻板机装置配合工作用于对活动支撑组件进行翻转。
4、以下是本发明对上述技术方案的进一步优化:
5、所述多功能滑撬包括两个为平行且间隔布设的导向梁,所述两个导向梁之间固定安装有多个支撑横梁,多个支撑横梁为平行且间隔布设。
6、进一步优化:所述多功能滑撬上还设置有多组支撑组件;支撑组件包括固定安装在导向梁上的多个堆拆垛支撑,多个堆拆垛支撑为间隔布设;堆拆垛支撑为竖直布设,堆拆垛支撑的上端部固定安安装有支撑块。
7、进一步优化:所述支撑组件还包括前销支撑,前销支撑为多个,多个前销支撑固定安装在支撑横梁上;前销支撑为竖直布设,前销支撑的上端部固定安装有定位销柱。
8、进一步优化:所述活动支撑组件包括固定安装在多功能滑撬上的安装座,安装座上安装有铰接座,铰接座上铰接有活动支撑杆,活动支撑杆远离铰接座的一端固定安装有顶接块。
9、进一步优化:所述安装座上安装有用于对活动支撑杆的翻倒位置进行定位的第一定位组件;铰接座上安装有用于对活动支撑杆的起立位置进行定位的第二定位组件。
10、进一步优化:所述第一定位组件包括包括可拆卸安装在安装座上且位于活动支撑杆下方位置处的第一调节板,第一调节板的上端面设置有第一定位面,第一调节板上开设有多个长条通孔,长条通孔内穿设有第一调节螺栓,第一调节螺栓与安装座上开设的螺纹孔螺纹连接。
11、进一步优化:所述活动支撑杆上与第一调节板和第二定位组件相对应的位置处分别固定安装有顶接板。
12、进一步优化:所述第二定位组件包括固定安装在铰接座上的连接板,连接板与活动支撑杆的起立极限位置对应布设;连接板上螺纹连接有多个第二调节螺栓,活动支撑杆处于起立位置时,所述第二调节螺栓的端部与活动支撑杆上相对应的顶接板顶接。
13、进一步优化:所述翻板机装置包括翻转架,翻转架上固定安装有驱动气缸驱动气缸的伸缩端朝向活动支撑组件;驱动气缸的伸缩端上固定安装有连接座,连接座上转动连接有导轮。
14、本发明采用上述技术方案,构思巧妙,结构合理,工业机器人工作通过拨轮能够把翻倒的活动支撑组件根据车型使用要求自动翻立起来,使多功能滑撬上的多个支撑与待承接的车型相对应,翻板机装置工作能够将起立的活动支撑组件自动全部翻倒,方便滑撬的堆垛与输送,能够实现人工替代,大大降低了人员成本;且使用范围较广,焊装车间、涂装车间和总装车间均可使用。
15、下面结合附图和实施例对本发明进一步说明。
技术特征:
1.一种基于智能机器人的翻板机系统,包括agv智能搬运系统(1),所述agv智能搬运系统(1)上滑动安装有多功能滑撬(2),其特征在于:所述agv智能搬运系统(1)两侧位置处设置有翻板机装置(4),翻板机装置(4)的位置处设置有工业机器人(3),多功能滑撬(2)上靠近其一侧位置处设置有两组活动支撑装置,两组活动支撑装置为对称布设,每组活动支撑装置包括多个为间隔布设的活动支撑组件,工业机器人(3)和翻板机装置(4)配合工作用于对活动支撑组件进行翻转。
2.根据权利要求1所述的一种基于智能机器人的翻板机系统,其特征在于:所述多功能滑撬(2)包括两个为平行且间隔布设的导向梁(201),所述两个导向梁(201)之间固定安装有多个支撑横梁(202),多个支撑横梁(202)为平行且间隔布设。
3.根据权利要求2所述的一种基于智能机器人的翻板机系统,其特征在于:所述多功能滑撬(2)上还设置有多组支撑组件;支撑组件包括固定安装在导向梁(201)上的多个堆拆垛支撑(203),多个堆拆垛支撑(203)为间隔布设;堆拆垛支撑(203)为竖直布设,堆拆垛支撑(203)的上端部固定安安装有支撑块。
4.根据权利要求3所述的一种基于智能机器人的翻板机系统,其特征在于:所述支撑组件还包括前销支撑(204),前销支撑(204)为多个,多个前销支撑(204)固定安装在支撑横梁(202)上;前销支撑(204)为竖直布设,前销支撑(204)的上端部固定安装有定位销柱。
5.根据权利要求4所述的一种基于智能机器人的翻板机系统,其特征在于:所述活动支撑组件包括固定安装在多功能滑撬(2)上的安装座(205),安装座(205)上安装有铰接座(206),铰接座(206)上铰接有活动支撑杆(207),活动支撑杆(207)远离铰接座(206)的一端固定安装有顶接块(208)。
6.根据权利要求5所述的一种基于智能机器人的翻板机系统,其特征在于:所述安装座(205)上安装有用于对活动支撑杆(207)的翻倒位置进行定位的第一定位组件;铰接座(206)上安装有用于对活动支撑杆(207)的起立位置进行定位的第二定位组件。
7.根据权利要求6所述的一种基于智能机器人的翻板机系统,其特征在于:所述第一定位组件包括包括可拆卸安装在安装座(205)上且位于活动支撑杆(207)下方位置处的第一调节板(209),第一调节板(209)的上端面设置有第一定位面,第一调节板(209)上开设有多个长条通孔,长条通孔内穿设有第一调节螺栓(210),第一调节螺栓与安装座(205)上开设的螺纹孔螺纹连接。
8.根据权利要求7所述的一种基于智能机器人的翻板机系统,其特征在于:所述活动支撑杆(207)上与第一调节板(209)和第二定位组件相对应的位置处分别固定安装有顶接板(211)。
9.根据权利要求8所述的一种基于智能机器人的翻板机系统,其特征在于:所述第二定位组件包括固定安装在铰接座(206)上的连接板(212),连接板(212)与活动支撑杆(207)的起立极限位置对应布设;连接板(212)上螺纹连接有多个第二调节螺栓(213),活动支撑杆(207)处于起立位置时,所述第二调节螺栓(213)的端部与活动支撑杆(207)上相对应的顶接板(211)顶接。
10.根据权利要求9所述的一种基于智能机器人的翻板机系统,其特征在于:所述翻板机装置(4)包括翻转架(402),翻转架(402)上固定安装有驱动气缸(401)驱动气缸(401)的伸缩端朝向活动支撑组件;驱动气缸(401)的伸缩端上固定安装有连接座,连接座上转动连接有导轮(403)。
技术总结
本发明汽车滑撬系统技术领域,公开了一种基于智能机器人的翻板机系统,包括AGV智能搬运系统,所述AGV智能搬运系统上滑动安装有多功能滑撬,所述AGV智能搬运系统两侧位置处设置有翻板机装置,翻板机装置的位置处设置有工业机器人,多功能滑撬上靠近其一侧位置处设置有两组活动支撑装置,两组活动支撑装置为对称布设,每组活动支撑装置包括多个为间隔布设的活动支撑组件,工业机器人和翻板机装置配合工作用于对活动支撑组件进行翻转,本发明整体结构简单,使用方便,不能够根据不同车辆将堆拆垛支撑自动翻倒和起立,替代人工,大大降低了人员成本。
技术研发人员:李敏,刘春明,李向民,郭京涛,陈晓东,刘彦,孙晓艳,孙德广,单体晓,徐二羊
受保护的技术使用者:迈赫机器人自动化股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!