一种饼干包装线的自动接箱码垛装置的制作方法
本发明涉及码垛装置,具体为一种饼干包装线的自动接箱码垛装置。
背景技术:
1、现有的饼干生产过程中,将饼干进行装袋密封,形成独立包装的小袋产品,然后再将若干个小袋进行装箱,便于进行后续放置、储存和售卖,装箱完成后,为了进行后续的运输,会将若干个箱子进行堆叠码垛,进行转移,现有的码垛装置可以将各种物料包装后的包装袋、包装箱、包装桶自动在运输车板或者车厢里进行全自动码垛装车,提高了生产效率和质量,降低了生产成本。
2、现有的中国专利号为cn113353643b的中国专利公开了码垛装置,包括上料输送机构、取放机构、位置感测件和控制器,控制取放机构移取上料输送机构上的待加工的工件;控制取放机构沿预设轨迹将待加工的工件移取至位置感测件,以使位置感测件感测待加工的工件的位置信息;根据位置感测件感测的位置信息控制取放机构可选择地调整待加工的工件的姿态,以使待加工的工件按照预设姿态放置于上料架,码垛装置自动化程度高,极大地缩短了码垛时间,效率较高,且可避免出现工件摆放不整齐的问题。
3、但是在对装箱后的饼干进行码垛,便于进行后续放置、储存和售卖时,需要将箱体码垛在托盘或踏板上,现有托盘或踏板在仓储放置时为减小占地空间通常为叠放方式,在对装箱后的饼干进行码垛过程中可能需要将叠放的托盘依次拿取下来,以便于通过传送装置使单个托盘自动送往至码垛机器人指定的码垛区域,因此,没有进一步减小工作量,且码垛过程中叠放不整齐的箱体可能会造成倾覆,从而导致箱体破损及商品损坏。
技术实现思路
1、本发明的目的在于提供一种饼干包装线的自动接箱码垛装置,具备减小人工放置托盘的工作量、实现对托盘和码垛时箱体位置的调整和规整的优点,解决了码垛时叠放的托盘拿取工作量较大,以及码垛过程中叠放不整齐的箱体可能会造成倾覆的问题。
2、为实现上述目的,本发明提供如下技术方案:一种饼干包装线的自动接箱码垛装置,包括码垛机器人和其一侧设置的底基板,所述底基板上设有向码垛机器人转运叠放状态托盘的承托结构;
3、所述承托结构包括固定连接在底基板上的容纳框架,容纳框架远离码垛机器人的一侧设有在水平方向上往复运动的横滑座,容纳框架底板对应横滑座位置开设有通槽,横滑座上表面固定连接有梯形推块,梯形推块在水平方向运动时与处于最下方的托盘侧面接触;
4、所述底基板靠近码垛机器人的一侧固定连接有导向架,容纳框架靠近导向架的一侧开设有供单个托盘通过的流通槽,导向架的上方设有调整托盘及其上码垛箱体位置的调齐组件。
5、优选的,所述容纳框架底部设有在垂直方向自由转动的凹轮,凹轮包括一体成型的凹槽部,凹轮的一侧设有下摆杆,下摆杆的底端定轴转动在底基板上,下摆杆上定轴转动有定位轮,定位轮的周面始终与凹轮的周面接触,下摆杆内通过滑槽滑动连接有上摆杆,上摆杆通过铰接座转动连接在横滑座的底部,横滑座通过横向滑槽滑动连接在滑框上,滑框固定连接在底基板上,底基板上还固定连接有矩形块,矩形块和下摆杆上分别挂接有拉簧的一端。
6、优选的,所述容纳框架靠近导向架的一侧设有导向组件,导向组件包括自由转动的摩擦辊,摩擦辊定轴转动在底基板上,摩擦辊处于容纳框架和导向架之间。
7、优选的,所述底基板上设有由电机驱动的主动轮,主动轮通过皮带传动连接有从动轮,从动轮同轴固定在摩擦辊上,主动轮通过转动轴与凹轮同轴固定,转动轴贯穿并通过轴承转动连接在底基板侧壁上。
8、优选的,所述导向架包括一体成型的倾斜滑梯区和水平码垛区,码垛机器人处于水平码垛区的一侧。
9、优选的,所述调齐组件包括设置在水平码垛区上方的异形支撑架,异形支撑架上固定连接有吊架,吊架通过气缸固定连接在钢支撑架上,钢支撑架固定连接在底基板上,异形支撑架上设有在水平方向上同步相向或相背运动的两组横向夹板和两组纵向夹板,两组横向夹板与两组纵向夹板之间的水平间距可调,两组横向夹板与两组纵向夹板的相对面组成容纳码垛箱体的空间。
10、优选的,所述异形支撑架上设有两组在水平横向同步运动的调节座,调节座的端部通过水平横滑架固定连接横向夹板,异形支撑架对应水平横滑架位置开设有让位槽,调节座上通过滑槽滑动连接有水平纵滑架,水平纵滑架上固定连接有纵向夹板,水平纵滑架的一侧设有改变纵向夹板在水平纵向运动距离的调节组件。
11、优选的,所述调节组件包括定轴转动在水平纵滑架上的导向块,导向块滑动套设在导向柱上,导向柱的一端固定连接在由电机驱动自由转动的摆向轮上。
12、优选的,所述异形支撑架的中部定轴转动有由电机驱动的齿轮,齿轮啮合有齿条面相对设置的两组横向齿条,两组横向齿条分别通过l形连接杆固定连接调节座。
13、与现有技术相比,本发明的有益效果如下:
14、1、本发明通过设置承托结构,能够在码垛箱体的过程中从叠放的托盘中自动转运单组托盘,减小人工放置托盘的工作量,并且能够调整托盘的位置和朝向,避免托盘的错位和倾斜,保证码垛的稳定性和安全性。
15、2、本发明通过设置调节组件、异形支撑架、横向夹板、纵向夹板等部件,实现对托盘和码垛时箱体位置的调整和规整,适应不同的码垛方式和需求,增加码垛的灵活性和通用性。
技术特征:
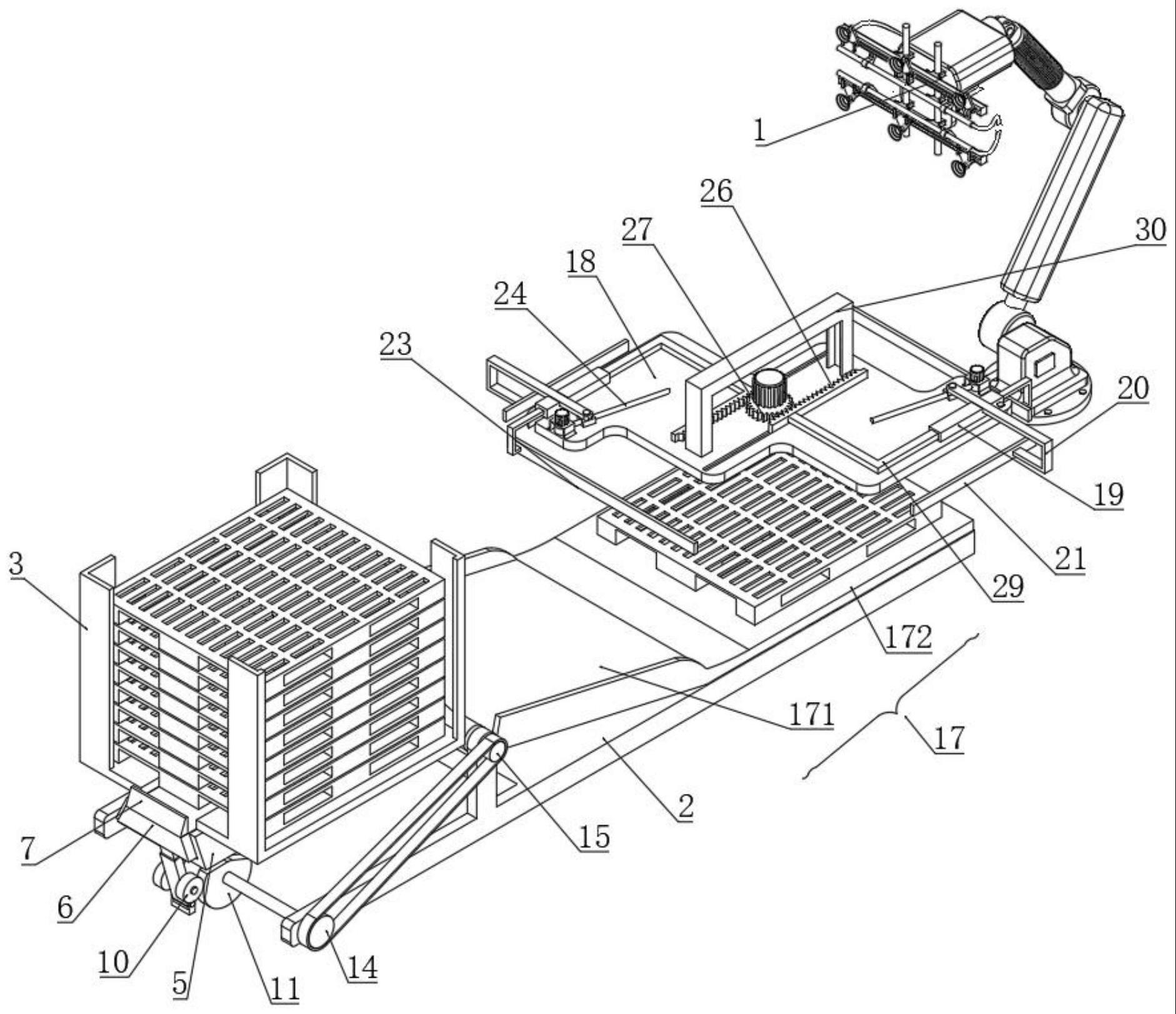
1.一种饼干包装线的自动接箱码垛装置,包括码垛机器人(1)和其一侧设置的底基板(2),其特征在于:所述底基板(2)上设有向码垛机器人(1)转运叠放状态托盘的承托结构;
2.根据权利要求1所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述容纳框架(3)底部设有在垂直方向自由转动的凹轮(11),凹轮(11)包括一体成型的凹槽部(111),凹轮(11)的一侧设有下摆杆(9),下摆杆(9)的底端定轴转动在底基板(2)上,下摆杆(9)上定轴转动有定位轮(10),定位轮(10)的周面始终与凹轮(11)的周面接触,下摆杆(9)内通过滑槽滑动连接有上摆杆(8),上摆杆(8)通过铰接座转动连接在横滑座(6)的底部,横滑座(6)通过横向滑槽滑动连接在滑框(5)上,滑框(5)固定连接在底基板(2)上,底基板(2)上还固定连接有矩形块(13),矩形块(13)和下摆杆(9)上分别挂接有拉簧(12)的一端。
3.根据权利要求2所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述容纳框架(3)靠近导向架(17)的一侧设有导向组件,导向组件包括自由转动的摩擦辊(16),摩擦辊(16)定轴转动在底基板(2)上,摩擦辊(16)处于容纳框架(3)和导向架(17)之间。
4.根据权利要求3所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述底基板(2)上设有由电机驱动的主动轮(14),主动轮(14)通过皮带传动连接有从动轮(15),从动轮(15)同轴固定在摩擦辊(16)上,主动轮(14)通过转动轴与凹轮(11)同轴固定,转动轴贯穿并通过轴承转动连接在底基板(2)侧壁上。
5.根据权利要求1所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述导向架(17)包括一体成型的倾斜滑梯区(171)和水平码垛区(172),码垛机器人(1)处于水平码垛区(172)的一侧。
6.根据权利要求5所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述调齐组件包括设置在水平码垛区(172)上方的异形支撑架(18),异形支撑架(18)上固定连接有吊架(30),吊架(30)通过气缸固定连接在钢支撑架上,钢支撑架固定连接在底基板(2)上,异形支撑架(18)上设有在水平方向上同步相向或相背运动的两组横向夹板(23)和两组纵向夹板(21),两组横向夹板(23)与两组纵向夹板(21)之间的水平间距可调,两组横向夹板(23)与两组纵向夹板(21)的相对面组成容纳码垛箱体的空间。
7.根据权利要求6所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述异形支撑架(18)上设有两组在水平横向同步运动的调节座(19),调节座(19)的端部通过水平横滑架(22)固定连接横向夹板(23),异形支撑架(18)对应水平横滑架(22)位置开设有让位槽(28),调节座(19)上通过滑槽滑动连接有水平纵滑架(20),水平纵滑架(20)上固定连接有纵向夹板(21),水平纵滑架(20)的一侧设有改变纵向夹板(21)在水平纵向运动距离的调节组件。
8.根据权利要求7所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述调节组件包括定轴转动在水平纵滑架(20)上的导向块(31),导向块(31)滑动套设在导向柱(24)上,导向柱(24)的一端固定连接在由电机驱动自由转动的摆向轮(25)上。
9.根据权利要求7所述的一种饼干包装线的自动接箱码垛装置,其特征在于:所述异形支撑架(18)的中部定轴转动有由电机驱动的齿轮(27),齿轮(27)啮合有齿条面相对设置的两组横向齿条(26),两组横向齿条(26)分别通过l形连接杆(29)固定连接调节座(19)。
技术总结
本发明公开了一种饼干包装线的自动接箱码垛装置,包括码垛机器人和其一侧设置的底基板,底基板上设有向码垛机器人转运叠放状态托盘的承托结构,容纳框架远离码垛机器人的一侧设有在水平方向上往复运动的横滑座,容纳框架底板对应横滑座位置开设有通槽,横滑座上表面固定连接有梯形推块,底基板靠近码垛机器人的一侧固定连接有导向架,导向架的上方设有调整托盘及其上码垛箱体位置的调齐组件,本发明通过设置承托结构,减小人工放置托盘的工作量,并且能够调整托盘的位置和朝向,避免托盘的错位和倾斜,保证码垛的稳定性和安全性,并实现对码垛过程中箱体位置的规整,适应不同的码垛方式和需求,增加码垛的灵活性和通用性。
技术研发人员:张学俭,张韬,李海疆,张鑫
受保护的技术使用者:中山市顶盛食品机械有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!