一种电动修井机天车防碰控制方法、系统、设备及介质与流程
本发明涉及一种电动修井机天车防碰控制方法、系统、设备及介质,属于新能源。
背景技术:
1、修井机主要用于油、气、井的大修和小修及钻井作业。主要由电机、传动系统、滚筒、钢丝绳、天车、大钩等组成。电机通过传动系统驱动滚筒旋转,钢丝绳一端连接在滚筒上,随着滚筒的旋转缠绕在滚筒上,钢丝绳另一端通过天车连接在大钩上。随着钢丝绳的缠绕,大钩高度不断提升,存在碰撞天车的危险,容易造成完全事故。
2、在作业过程中,当大钩提升至危险高度时,需要采取制动措施,使滚筒制动,大钩停止提升从而避免大钩碰撞天车的安全事故发生。现有技术一般通过限位传感器、旋转编码器等判断大钩提升高度,当达到限制位置时,发出警报并通过制动系统完成制动刹车。因此,需要一套复杂的制动系统和传感器等装置来实现天车防碰的功能,且存在一定偏差、控制精度低、响应速度慢。
技术实现思路
1、为解决现有技术的不足,本发明的目的在于提供一种电动修井机天车防碰控制方法、系统、设备及介质,解决了现有技术中系统结构复杂且成本高、控制精度低、响应速度慢的问题
2、为了实现上述目标,本发明采用如下的技术方案:
3、一种电动修井机天车防碰控制方法,包括如下步骤:
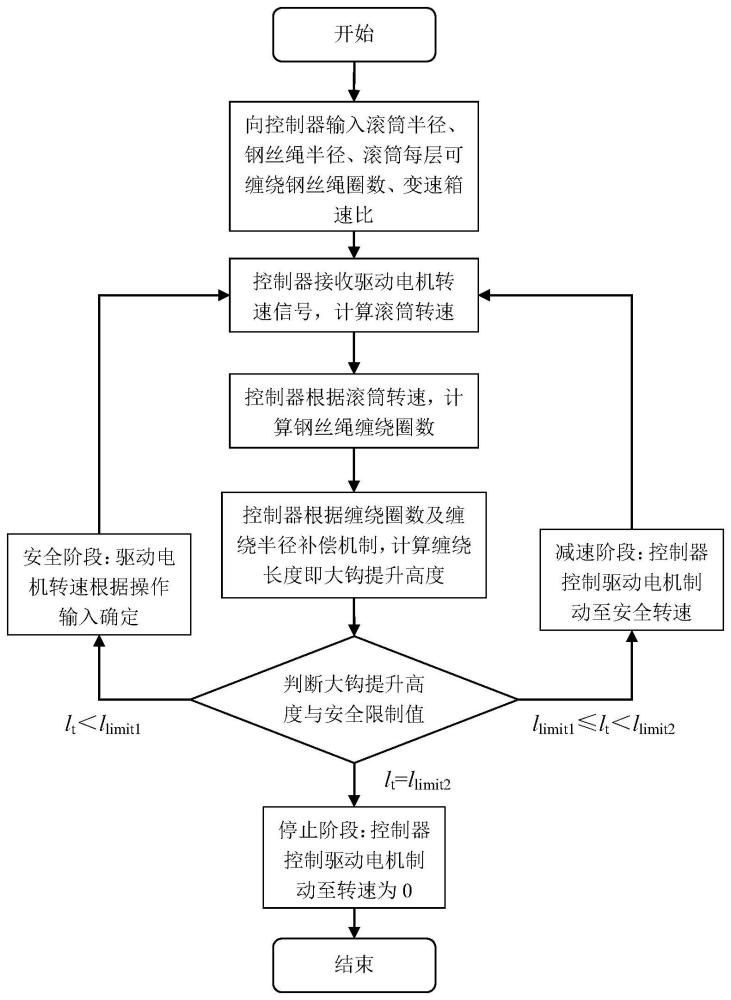
4、基于驱动电机转速n1和变速箱速比i,计算得到滚筒转速n2;
5、基于滚筒转速n2,计算滚筒上钢丝绳缠绕的圈数r;
6、基于滚筒上钢丝绳缠绕的圈数r、滚筒半径r1,钢丝绳半径r2和滚筒每层可缠绕钢丝绳圈数r0,计算大钩提升高度lt;
7、将大钩提升高度lt与预设的安全限制值进行比较,得到相应的比较结果;
8、基于比较结果,输出相应的控制信号进行制动控制。
9、进一步地,前述基于驱动电机转速n1和变速箱速比i,计算得到滚筒转速n2的步骤包括:
10、接收预先输入的变速箱速比i;
11、接收驱动电机转速信号,得到驱动电机转速n1;
12、计算滚筒转速n2:n2=n1/i。
13、进一步地,前述滚筒上钢丝绳缠绕的圈数r的计算式为:
14、r=∫n2·dt。
15、进一步地,前述大钩提升高度lt的计算式为:
16、
17、进一步地,前述将大钩提升高度lt与预设的安全限制值进行比较,得到相应的比较结果的步骤包括:
18、设定第一安全限制值llimit1、第二安全限制值llimit2,llimit1<llimit2;
19、若lt<llimit1,提升过程处于安全阶段;
20、若llimit1≤lt<llimit2,提升过程处于减速阶段;
21、若lt=llimit2,提升过程处于停止阶段。
22、进一步地,前述基于比较结果,输出相应的控制信号进行制动控制的步骤包括:
23、若提升过程处于安全阶段,向驱动电机发送转速指令,转速指令基于操作输入设定;
24、若提升过程处于减速阶段,控制驱动电机制动至安全转速nsafe;
25、若提升过程处于停止阶段,控制驱动电机制动至转速为0。
26、一种电动修井机天车防碰控制系统,包括驱动电机、控制器、变速箱、滚筒、钢丝绳、天车和大钩;
27、驱动电机通过变速箱连接到滚筒,用于驱动滚筒旋转;
28、钢丝绳通过天车,一端连接到滚筒上,另一端连接到大钩上;
29、控制器接收输入操作参数,经过运算后向驱动电机发送需求扭矩和转速指令,控制滚筒旋转速度。
30、进一步地,前述输入操作参数包括驱动电机转速n1、变速箱速比i、滚筒半径r1,钢丝绳半径r2和滚筒每层可缠绕钢丝绳圈数r0。
31、一种电子设备,包括处理器以及存储器,存储器存储有计算机介质,上计算机介质由处理器执行时,运行前述一项的电动修井机天车防碰控制方法。
32、一种计算机介质,计算机介质上存储有计算机程序,计算机程序被处理器运行时执行前述任一项的电动修井机天车防碰控制方法。
33、本发明所达到的有益效果:
34、1、本发明提出的电动修井机天车防碰控制系统,简化了传感器设备及机械制动系统,解决了现有技术方案系统复杂且成本高的问题;
35、2、本发明提出的钢丝绳缠绕半径补偿机制,提高了大钩提升高度的计算精度,解决了大钩提升高度判断误差大的问题;
36、3、本发明提出的电制动方式即电机转速控制模式,解决了机械制动系统复杂且响应速度慢的问题,制动响应快、控制精准;
37、4、本发明提出的分阶段控制方法,在既保证作业效率的前提下,又可以提高控制精度,最大程度的保证了系统的安全性。
技术特征:
1.一种电动修井机天车防碰控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的电动修井机天车防碰控制方法,其特征在于,所述基于驱动电机转速n1和变速箱速比i,计算得到滚筒转速n2的步骤包括:
3.根据权利要求1所述的电动修井机天车防碰控制方法,其特征在于,所述滚筒上钢丝绳缠绕的圈数r的计算式为:
4.根据权利要求1所述的电动修井机天车防碰控制方法,其特征在于,所述大钩提升高度lt的计算式为:
5.根据权利要求1所述的电动修井机天车防碰控制方法,其特征在于,将所述大钩提升高度lt与预设的安全限制值进行比较,得到相应的比较结果的步骤包括:
6.根据权利要求5所述的电动修井机天车防碰控制方法,其特征在于,基于所述比较结果,输出相应的控制信号进行制动控制的步骤包括:
7.一种电动修井机天车防碰控制系统,其特征在于,包括驱动电机、控制器、变速箱、滚筒、钢丝绳、天车和大钩;
8.根据权利要求7所述的电动修井机天车防碰控制系统,其特征在于,所述输入操作参数包括驱动电机转速n1、变速箱速比i、滚筒半径r1,钢丝绳半径r2和滚筒每层可缠绕钢丝绳圈数r0。
9.一种电子设备,其特征在于,包括处理器以及存储器,所述存储器存储有计算机介质,上所述计算机介质由所述处理器执行时,运行如权利要求1至6任一项所述的电动修井机天车防碰控制方法。
10.一种计算机介质,其特征在于,所述计算机介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至6任一项所述的电动修井机天车防碰控制方法。
技术总结
本发明公开了一种电动修井机天车防碰控制方法、系统、设备及介质,基于驱动电机转速n<subgt;1</subgt;和变速箱速比i,计算得到滚筒转速n<subgt;2</subgt;,基于滚筒转速n<subgt;2</subgt;,计算滚筒上钢丝绳缠绕的圈数r;基于滚筒上钢丝绳缠绕的圈数r、滚筒半径R<subgt;1</subgt;,钢丝绳半径R<subgt;2</subgt;和滚筒每层可缠绕钢丝绳圈数r<subgt;0</subgt;,计算大钩提升高度l<subgt;t</subgt;,将大钩提升高度l<subgt;t</subgt;与预设的安全限制值进行比较,得到相应的比较结果,基于比较结果,输出相应的控制信号进行制动控制。
技术研发人员:李岳,刘吉超,王洪强,邱剑飞
受保护的技术使用者:江苏徐工工程机械研究院有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!