多自由度组合式电动举升平台装配AGV及其车架装配方法与流程
本发明属于生产装配,具体地说涉及一种多自由度组合式电动举升平台装配agv及其车架装配方法。
背景技术:
1、随着智能化的发展,agv(自动导引车)逐步应用到生产、生活的方方面面,成为生产力提高的倍增器;现有的汽车装配流水线的运行方式有同步传输的(强制式),即链板输送线、倍速链输送线、悬挂链输送线等都是比较常见的组合,安装在地面,与地面齐平,需进行地基处理,不易拆装。
2、现有专利cn110615051a提供了一种车型后桥及板簧分装工装,包括底座、固定支撑件、第一活动支撑件、第二活动支撑件、第三活动支撑件以及第四活动支撑件,还包括有电机、四根共线设置的丝杆和连接在相邻两个丝杆之间的连接块,电机的电机轴与位于直线端部的丝杆一端相连;连接块的两端设有用于容纳相邻两个丝杆的端部的柱形容腔,且柱形容腔内还同轴固定有一环形的滑动槽,丝杆上还固定有一抵接板,抵接板的端部配置有可在滑动槽内滑动的滑动块,连接块上还设有三组连通柱形容腔的通槽,且相邻两个通槽之间的间距与所述滑动块的宽度相同,且通槽内可朝上柱形容腔内插接有限位板,本发明虽然能够实现多种车型后桥及板簧分装,但其位置比较固定,不易拆装调整产线。
技术实现思路
1、针对现有技术车辆装配生产工装需要进行地基处理,位置固定,不易拆装调整产线的问题,现提出一种多自由度组合式电动举升平台装配agv及其车架装配方法。本发明提供如下技术方案:
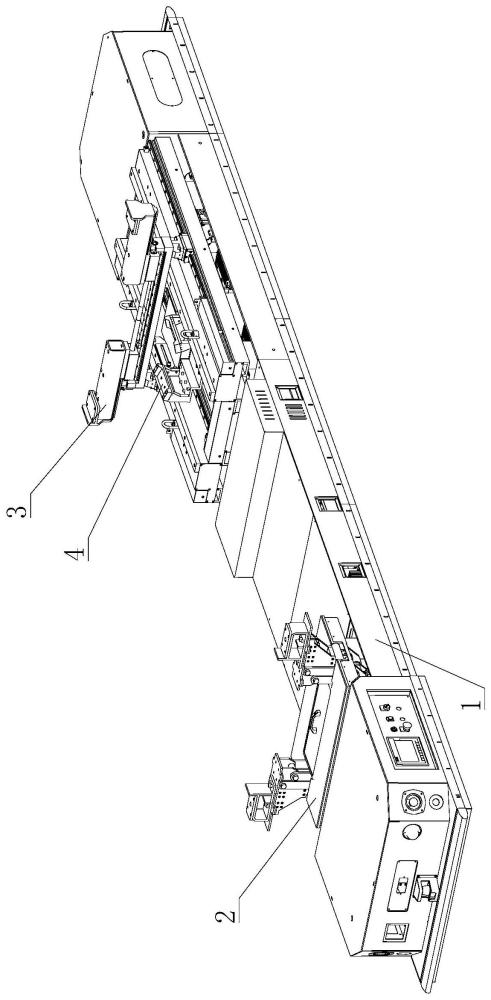
2、一种多自由度组合式电动举升平台装配agv,包括车体、前举升平台和后举升平台,所述前举升平台包括第一升降驱动装置和连接于第一升降装置输出端的第一支撑台面,所述第一支撑台两侧铰接有第一定位台,第一支撑台面下设置有第一驱动装置和第一丝杠,第一丝杆转动连接于第一支撑台面,第一驱动装置传动连接于第一丝杆,第一丝杆上螺纹连接有第一丝杆螺母,第一丝杆螺母和第一定位台通过第一连杆相互连接,第一丝杆螺母通过第一连杆带动第一定位台翻转;第一丝杠两端均连接有第一丝杆螺母,当两个第一丝杆螺母的螺纹旋转方向相反,两侧的第一定位台可同步相背或相向地进行翻转;
3、后举升平台包括第二升降驱动装置,第二升降驱动装置的输出端连接有纵向移动底座,纵向移动底座上滑动连接有横向移动底座,横向移动底座上架设转动连接有第二丝杠,第二丝杠两端通过第二丝杆螺母螺纹连接有第二定位平台,两侧的第二定位平台可同步进行相向或背向移动。
4、优选的,所述第一定位台上端设置有若干组安装孔,第一定位台通过安装孔和螺栓连接有第一定位支架,所述第一定位支架上端设置有l型限位平台,l型限位平台上固定有橡胶垫片。
5、优选的,所述第一升降驱动装置包括依次传动连接的第一伺服电机、第一联轴器、第一齿轮箱、第一传动轴和用于直线驱动的第一多级电缸,第一传动轴两端各驱动连接一个第一多级电缸。
6、优选的,所述第一定位台通过第一铰接杆和第二铰接杆连接于第一支撑台,第一铰接杆和第二铰接杆与第一支撑台和第一定位台构成平行四边形连杆机构,第一连杆铰接于第一铰接杆并推动第一铰接杆翻转。
7、优选的,所述第二升降驱动装置包括依次传动连接的第二伺服电机、第二减速器、第二联轴器、第二齿轮箱、第二传动轴和用于直线驱动的第二多级电缸,第二传动轴两端各驱动连接一个第二多级电缸,第二多级电缸输出端连接于纵向移动底座底部。
8、优选的,所述后举升平台上还滑动连接有用于支撑驱动桥的桥包支撑座,所述桥包支撑座包括中部的驱动连接座和设置在驱动连接座两端的桥包定位台。
9、优选的,所述桥包支撑座滑接于纵向移动底座中部,第二定位平台位于桥包支撑座两侧,桥包支撑座与第二定位平台的移动方向相互平行,结构紧凑。
10、一种基于多自由度组合式电动举升平台装配agv的车架装配方法,其步骤包括:
11、s1、预先吊装车架,车架倒置;
12、s2、控制多自由度组合式电动举升平台装配agv移动至车架下方;
13、s3、根据车架类型,预先调整多自由度组合式电动举升平台装配agv的前举升平台和后举升平台的支撑间距和高度;
14、s4、控制多自由度组合式电动举升平台装配agv承接车架;
15、s5、对车架底侧的零件进行装配,装配后起吊并翻转车架;
16、s6、调整多自由度组合式电动举升平台装配agv的前举升平台和后举升平台的支撑间距和高度
17、s7、控制多自由度组合式电动举升平台装配agv承接车架;
18、s8、调整车架姿态或对车架上侧的零件进行装配;
19、s9、起吊车架,控制多自由度组合式电动举升平台装配agv重复步骤s1-s8。
20、优选的,在步骤s3之后,s4之前,先将吊装的车架下方,靠近多自由度组合式电动举升平台装配agv后再次调整前举升平台和后举升平台的支撑间距和高度。
21、优选的,步骤s9中,多自由度组合式电动举升平台装配agv执行操作前,预先判断自身电量,当电量不足以完成一整个步骤s1-s8时,则临时运行至充电区域进行充电,否则继续。
22、相对于现有技术,本发明具有以下有益效果:
23、1、本发明前举升平台可调高度、间隔和支撑角度,而后举升平台在可调高度自身间隔的同时还可以调整与前举升平台的距离,两者结合可以适用多种型号的车架,在agv的基础上能够主动适应各种产线,提高装配产线的装配效率;
24、2、基于多自由度组合式电动举升平台装配agv,可对车架提供准确的定位和可靠的支撑,搭配吊装设备可对翻转后的车架进行装配,提高装配效率;
25、3、在装配过程中多自由度组合式电动举升平台装配agv可主动在产线中进行行进替换及动力补充,多个多自由度组合式电动举升平台装配agv组合可实现多产线、不间断地装配加工循环。
技术特征:
1.一种多自由度组合式电动举升平台装配agv,其特征在于,包括车体(1)、前举升平台(2)和后举升平台(3),所述前举升平台(2)包括第一升降驱动装置(21)和连接于第一升降装置输出端的第一支撑台面(22),所述第一支撑台两侧铰接有第一定位台(23),第一支撑台面(22)下设置有第一驱动装置(25)和第一丝杠(29),第一丝杆转动连接于第一支撑台面(22),第一驱动装置(25)传动连接于第一丝杆,第一丝杆上螺纹连接有第一丝杆螺母(27),第一丝杆螺母(27)和第一定位台(23)通过第一连杆(28)相互连接,第一丝杆螺母(27)通过第一连杆(28)带动第一定位台(23)翻转;第一丝杠(29)两端均连接有第一丝杆螺母(27),当两个第一丝杆螺母(27)的螺纹旋转方向相反,两侧的第一定位台(23)可同步相背或相向地进行翻转;
2.根据权利要求1所述的多自由度组合式电动举升平台装配agv,其特征在于,所述第一定位台(23)上端设置有若干组安装孔,第一定位台(23)通过安装孔和螺栓连接有第一定位支架(24),所述第一定位支架(24)上端设置有l型限位平台。
3.根据权利要求1所述的多自由度组合式电动举升平台装配agv,其特征在于,所述第一升降驱动装置(21)包括依次传动连接的第一伺服电机(213)、第一联轴器、第一齿轮箱(212)、第一传动轴和用于直线驱动的第一多级电缸(211),第一传动轴两端各驱动连接一个第一多级电缸(211)。
4.根据权利要求1所述的多自由度组合式电动举升平台装配agv,其特征在于,所述第一定位台(23)通过第一铰接杆(2010)和第二铰接杆(2011)连接于第一支撑台,第一铰接杆(2010)和第二铰接杆(2011)与第一支撑台和第一定位台(23)构成平行四边形连杆机构,第一连杆(28)铰接于第一铰接杆(2010)并推动第一铰接杆(2010)翻转。
5.根据权利要求1所述的多自由度组合式电动举升平台装配agv,其特征在于,所述后举升平台(3)上还滑动连接有用于支撑驱动桥(6)的桥包支撑座(4),所述桥包支撑座(4)包括中部的驱动连接座(41)和设置在驱动连接座(41)两端的桥包定位台(42)。
6.根据权利要求5所述的多自由度组合式电动举升平台装配agv,其特征在于,所述桥包支撑座(4)滑接于纵向移动底座(32)中部,第二定位平台(35)位于桥包支撑座(4)两侧,桥包支撑座(4)与第二定位平台(35)的移动方向相互平行。
7.根据权利要求1所述的多自由度组合式电动举升平台装配agv,其特征在于,所述第二升降驱动装置(31)包括依次传动连接的第二伺服电机(311)、第二减速器、第二联轴器、第二齿轮箱(312)、第二传动轴和用于直线驱动的第二多级电缸(313),第二传动轴两端各驱动连接一个第二多级电缸(313),第二多级电缸(313)输出端连接于纵向移动底座(32)底部。
8.一种基于多自由度组合式电动举升平台装配agv的车架装配方法,其特征在于,通过如权利要求1-7任意一项所述的多自由度组合式电动举升平台装配agv进行车架(5)的装配,其步骤包括:
9.根据权利要求8所述的基于多自由度组合式电动举升平台装配agv的车架装配方法,其特征在于,步骤s3之后,s4之前,先将吊装的车架(5)下方,靠近多自由度组合式电动举升平台装配agv后再次调整前举升平台(2)和后举升平台(3)的支撑间距和高度。
10.根据权利要求8所述的基于多自由度组合式电动举升平台装配agv的车架装配方法,其特征在于,步骤s9中,多自由度组合式电动举升平台装配agv执行操作前,预先判断自身电量,当电量不足以完成一整个步骤s1-s8时,则临时运行至充电区域进行充电,否则继续。
技术总结
本发明属于生产装配技术领域,具体公开一种多自由度组合式电动举升平台装配AGV及其车架装配方法,包括车体、前举升平台和后举升平台,前举升平台包括第一升降驱动装置和第一支撑台面,第一支撑台两侧铰接有第一定位台;后举升平台包括第二升降驱动装置,第二升降驱动装置的输出端连接有纵向移动底座,纵向移动底座上滑动连接有横向移动底座,横向移动底座上架设转动连接有第二丝杠,第二丝杠两端通过第二丝杆螺母螺纹连接有第二定位平台,前举升平台可调高度、间隔和支撑角度,而后举升平台在可调高度自身间隔的同时还可以调整与前举升平台的距离,两者结合可以适用多种型号的车架,在AGV的基础上能够主动适应各种产线,提高装配产线的装配效率。
技术研发人员:朱津明,韩安民,陈博,田洪云,薛伟,张林林,高升栋,贾瑞宽
受保护的技术使用者:临沂临工智能信息科技有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!