一种支持混合码垛及其垛型规划的视觉机器人的制作方法
本发明涉及码垛机器人,具体涉及一种支持混合码垛及其垛型规划的视觉机器人。
背景技术:
1、码垛机器人是机、电一体化高新技术产品,中、低位码垛机可以满足中低产量的生产需要,可按照要求的编组方式和层数,完成对料袋、胶块、箱体等各种产品的码垛。最优化的设计使得垛形紧密、整齐。
2、现有的码垛机器人在使用过程中是通过人工输入码垛物品的参数以及数量、然后通过六轴机械臂将物品进行抓取码垛,上述方式在码垛过程中,由于无法对码垛空间的面积以及码垛物品的规格进行测量,进而导致无法对垛型进行规划以及无法对不同的物品进行混合码垛,导致装置的使用性能不佳,同时在码垛过程中,由于无法对六轴机械臂旋转半径内的障碍物以及人体进行监测,进而导致其无法进行避障,容易对人体造成伤害,安全性不佳。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种支持混合码垛及其垛型规划的视觉机器人。
2、本发明通过以下技术方案来实现上述目的:
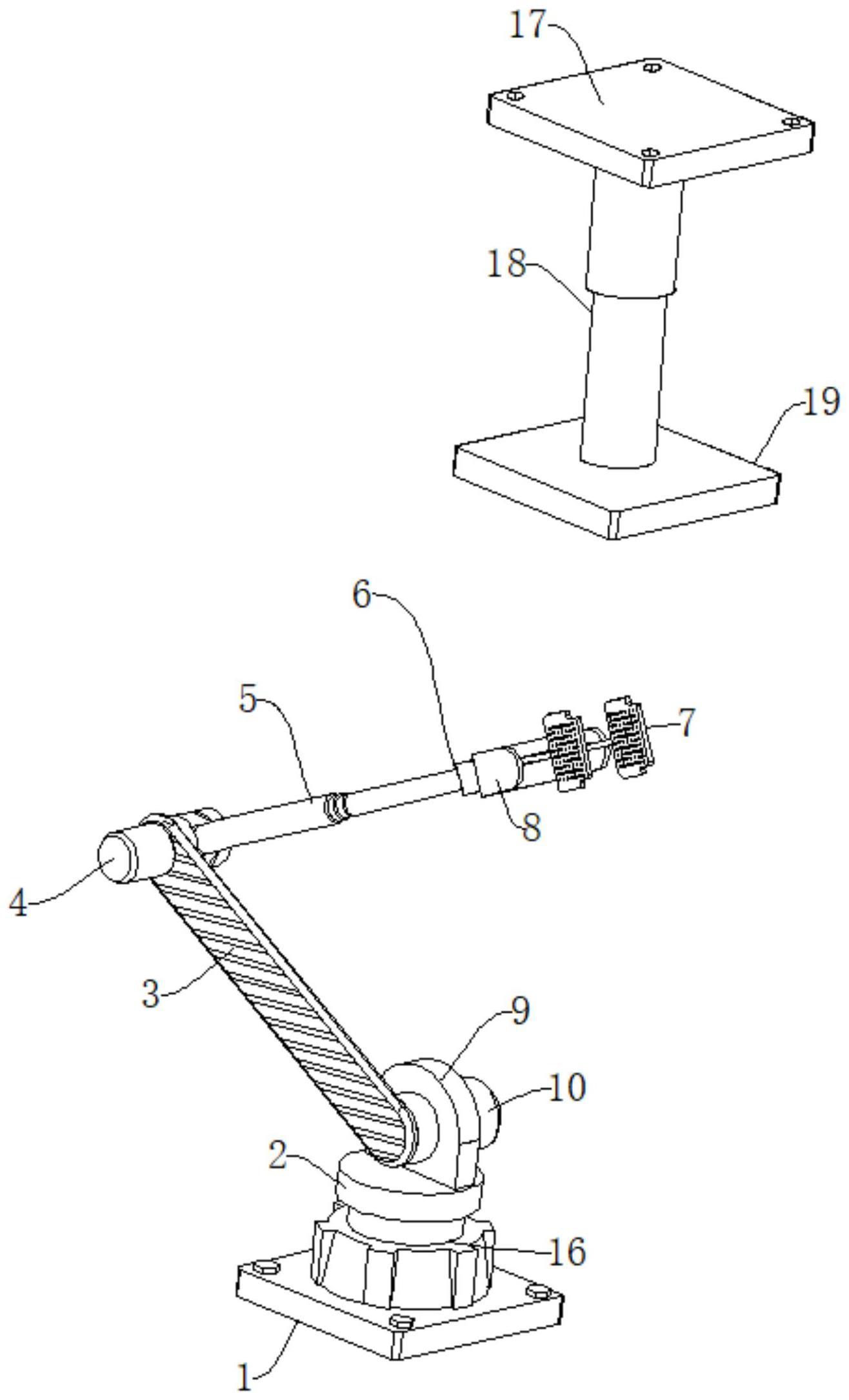
3、一种支持混合码垛及其垛型规划的视觉机器人,包括安装座,所述安装座上端固定有承载座,所述承载座内设置有电机四,所述电机四的输出轴上固定有转盘,所述转盘上端设置有支座,所述支座一侧壁上安装有电机一,所述支座与所述电机一相对的一侧壁上安装有联动臂一,所述联动臂一一端固定有电机二,所述电机二的输出轴上固定有联动臂二,所述联动臂二一端设置有连接座,所述连接座内安装有电机三,所述电机三的输出轴上固定有夹持架,所述夹持架内壁之间固定有导向杆,所述导向杆上套设有导向块,所述导向块一侧壁上连接有夹持板,所述夹持板背壁与所述夹持架内壁之间安装有气缸,所述夹持架上方设置有固定板,所述固定板底端安装有电动推杆,所述电动推杆的输出端上连接有升降板,所述升降板底壁中部固定有投射器,所述投射器两侧均固定有ccd相机,所述升降板底壁上阵列分布有多组雷达探头,所述雷达探头一侧设置有警报器。
4、进一步的,所述承载座焊接在所述安装座上,所述承载座外壁上呈圆周分布有加强筋,所述电机四通过螺栓固定在所述承载座内部,所述电机四的输出轴与所述转盘固定连接。
5、通过采用上述技术方案,所述安装座便于将装置进行固定,所述电机四通过所述转盘可对六组机械臂的方位进行调节。
6、进一步的,所述支座焊接在所述转盘上,所述电机一通过螺栓固定在所述支座一侧壁上,所述电机一的输出轴贯穿所述支座与所述联动臂一底端固定连接。
7、通过采用上述技术方案,所述电机一可带动所述联动臂一转动,进而对其角度进行调节。
8、进一步的,所述电机二通过螺栓固定在所述联动臂一顶端一侧壁上,所述电机二的输出轴与所述联动臂二固定连接,所述联动臂二为一组具有多级伸缩性能的液压杆。
9、通过采用上述技术方案,所述电机二可带动所述联动臂二转动,进而对其角度进行调节,所述联动臂二可进行伸缩对所述夹持板的高度进行调节。
10、进一步的,所述连接座通过螺栓固定在所述联动臂二一端,所述连接座为u型结构,所述电机三通过螺栓固定在所述连接座内。
11、通过采用上述方案,所述电机三可带动所述夹持架转动,进而对所述夹持板的角度进行调节。
12、进一步的,所述电机三的输出轴与所述夹持架固定连接,所述夹持架为u型结构,所述导向杆焊接在所述夹持架内,所述导向块与所述导向杆滑动连接。
13、通过采用上述技术方案,所述导向杆与所述导向块相结合可对所述夹持板的移动进行导向。
14、进一步的,所述夹持板与所述导向块焊接,所述气缸的固定部与所述夹持架通过螺钉连接,所述气缸的输出端与所述夹持板通过螺栓连接,所述夹持板为t型结构且表面为镂空结构。
15、通过采用上述技术方案,所述气缸推动所述夹持板相向移动可对需要码垛的物品进行夹持。
16、进一步的,所述电动推杆的固定部与所述固定板通过螺钉连接,所述电动推杆的输出端与所述升降板通过螺栓连接。
17、通过采用上述技术方案,所述固定板可固定在六轴机械臂操作空间的上方,所述电动推杆通过所述升降板可对所述ccd相机以及所述投射器的高度调节,以保证其可以监测整个码垛空间。
18、进一步的,所述投射器与所述升降板通过螺栓连接,所述ccd相机与所述升降板通过螺栓连接,所述ccd相机分布在所述投射器两侧,所述ccd相机与所述投射器电连接。
19、通过采用上述技术方案,所述投射器与所述ccd相机和组成3d结构光,其通过所述投射器投射到被测物体表面的主动结构信息,如激光条纹、格雷码、正弦条纹等,再通过两组所述ccd相机拍摄被测表面即得结构光图像,最后,基于三角测量原理经过图像三维解析计算从而实现三维重建,可得到物体的尺寸,进而可使3d结构光预先对码垛空间的面积进行计算,接着再对码垛物品的尺寸进行计算,通过后台处理便可对码垛空间进行合理规划,同时也可对垛型进行规划以及支持混合码垛,保证码垛效果,有效提高六轴机械臂的使用性能。
20、进一步的,所述雷达探头通过螺钉固定在所述升降板内部,所述警报器与所述升降板通过螺钉连接,所述雷达探头与所述警报器电连接。
21、通过采用上述技术方案,在码垛过程中,所述雷达探头可对六轴机械臂作业范围内的障碍物以及人体进行实时监测,当监测到障碍物时,可通过后台改变移动路径进行避障,当监测到人体时,可通过所述警报器对人员进行提醒,使其快速撤离出作业范围,避面对人员造成伤害,提高六轴机械臂码垛时的安全性。
22、具体工作原理为:首先通过安装座将装置进行安装固定,再将所述固定板固定在六轴机械臂操作空间的上方,所述电动推杆通过所述升降板可对所述ccd相机以及所述投射器的高度调节,以保证其可以监测整个码垛空间,接着通过所述ccd相机与所述投射器组成的3d结构光预先对码垛空间的面积进行计算,接着再对码垛物品的尺寸进行计算,通过后台处理便可对码垛空间进行合理规划,同时也可对垛型进行规划以及支持混合码垛,然后所述电机一带动所述联动臂一转动,所述电机二带动所述联动臂二转动,同时所述联动臂二伸出,再在所述电机三的作用下对所述夹持板的角度进行调节,调节完成后,所述气缸推动所述夹持板相向移动对码垛物品进行夹持,在移动过程中,所述导向块与所述导向杆相结合可保证移动时的稳定性,接着重复上述操作,所述电机四通过所述转盘带动物品转动,同时再配合所述电机一、所述电机二以及所述电机三将物品调节到码垛区域进行码垛,在码垛过程中,所述雷达探头可对六轴机械臂作业范围内的障碍物以及人体进行实时监测,当监测到障碍物时,可通过后台改变移动路径进行避障,当监测到人体时,可通过所述警报器对人员进行提醒,使其快速撤离出作业范围,避面对人员造成伤害,提高六轴机械臂码垛时的安全性。
23、本发明的有益效果在于:
24、1、通过设置电动推杆、升降板、ccd相机和投射器,在装置工作过程中,电动推杆通过升降板可对ccd相机以及投射器的高度调节,以保证其可以监测整个码垛空间,接着通过ccd相机与投射器组成的3d结构光预先对码垛空间的面积进行计算,接着再对码垛物品的尺寸进行计算,通过后台处理便可对码垛空间进行合理规划,同时也可对垛型进行规划以及支持混合码垛,提高六轴机械臂码垛时的使用性能;
25、2、通过设置雷达探头和警报器,在码垛过程中,雷达探头可对六轴机械臂作业范围内的障碍物以及人体进行实时监测,当监测到障碍物时,可通过后台改变移动路径进行避障,当监测到人体时,可通过警报器对人员进行提醒,使其快速撤离出作业范围,避面对人员造成伤害,提高六轴机械臂码垛时的安全性。
- 还没有人留言评论。精彩留言会获得点赞!