具有地面层订单履行区和用于单元负载的存储系统的订单履行系统的制作方法
传统的高货架存储设施包括进料或存储入口区域,托盘(单元负载)经由该区域被交付,并且货架服务单元(自动存储和取回系统,asrs)从该区域收集托盘以进入存储区,即所谓的预置区。类似地,需要一个从存储区移出的区域,在从存储区移出后,货架服务单元也同样将托盘分配给预置区。对于自动拣选仓库,拣选点通常布置在预置区中。预置区也是为库存管理系统或物料流计算机识别托盘的地方。
背景技术:
1、这种基于asrs的传统系统在适应给定仓库空间方面的灵活性有限。相比之下,建筑物的设计通常遵循asrs的要求,而不是相反。另外,固定基础设施的使用导致入库/出库点的数量和位置的灵活性较低。这也意味着从每个输入/输出点存取整个sku(库存单元)的灵活性较低。所有这些都需要建筑物的天花板高度比平时更高,从而产生大额投资。使用固定基础设施会降低存储位置和吞吐量方面的可扩展性。因此,存储密度以及存储密度和吞吐量的平衡也不是最佳的。从本质上讲,给定空间中的绝对性能很低。
2、已知一种不同类型的托盘存储机构,其使用二维托盘穿梭机,穿梭机在过道中以及在横向货架存储通道内输送托盘,参见例如ep 3 090 966 a1或ep 3 003 917 a1。在这两种情况下,这些所谓的2d托盘穿梭机都具有被提升和降低以承载托盘的承载框架,从而可以使它们在托盘下方行进,然后将其提升进行运输。
3、然而,这些2d托盘穿梭机还存在其他问题,例如存储成本较高或每个存储位置的成本较高,因为货架非常复杂且2d穿梭机价格昂贵。另外,使用这些2d托盘穿梭系统进行订单合并和按优选顺序取回物品既慢且难。因为2d托盘穿梭机必须与升降机连接,所以在竖直移动方面的性能也受到限制。
技术实现思路
1、因此,本发明的一个目的是提供一种具有地面层订单履行区和用于单元负载的存储系统的订单履行系统,其允许高密度存储,同时保持灵活性并具有高性能,即不具有上述任一系统的缺点。
2、该目的通过权利要求1的系统来解决。
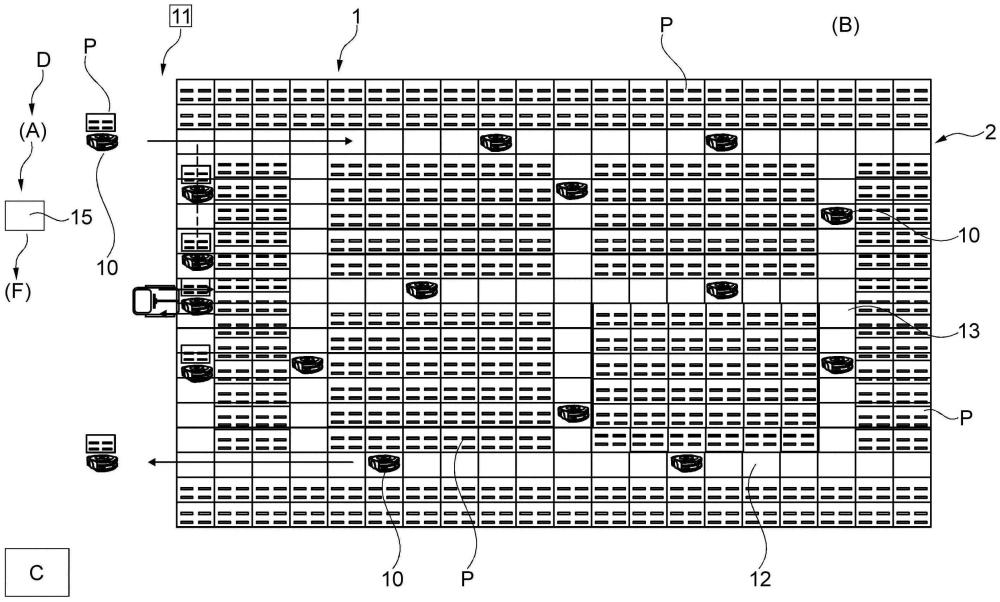
3、已经认识到一种具有地面层订单履行区和用于单元负载的存储系统的订单履行系统,该存储系统具有地面层存储区和高架存储区,其中高架存储区是多层货架,该多层货架具有位于每层的货架与每层具有存储通道(其具有存储轨道)的货架之间的过道轨道,过道轨道和存储轨道由双向载重穿梭机提供服务,该双向载重穿梭机适于在所述存储轨道和所述过道轨道两者上行进以用于单元负载的存储和取回。过道轨道和存储轨道可以有利地与由在控制器的控制下的自主移动机器人(amr)和/或自动导引车(agv)提供服务的地面层订单履行区和地面层存储区相结合,以克服上述问题。
4、换句话说,并且根据本发明,快速移动装置存储和订单缓冲发生在地面层,并且地面层由高度灵活的自主移动机器人(amr)和/或自动导引车(agv)服务。而慢速移动装置存储位于快速移动装置存储上方并由2d穿梭机服务。
5、使用2d穿梭机有助于极大地改善与传统的基于asrs的系统相关的限制,而使用基于amr/agv的存储有助于极大地改善2d穿梭机的缺点。
6、通过本发明,由于地面存储的性质,地面层实现了吞吐量的显著提高,从而允许从所有四个方向存取任何位置的单元负载。这显著减少了穿梭和洗选的数量。此外,货架结构不需要或不用于基于地面层的存储,因此货架的立柱不需要支承地面层上的单元负载(例如托盘),从而减少了总体货架负载和成本。
7、此外,amr/agv的单价预计将低于2d单元负载穿梭机的单价。通过使用具有amr/agv的地面层作为慢速移动装置缓冲区和排序区,订单合并和排序的吞吐量得到提高。
8、通过使用双向载重穿梭机主要将慢速移动装置存储在高架存储区上,应当减少了竖直运动,并且因此降低了使用竖直升降机的必要性,从而提高了性能。
9、竖直搬运装置将连接高架存储区和地面存储区。竖直搬运装置可以是专用的固定式升降机和/或自动或手动叉车。这些可以具有用于相应服务车辆的对接。
10、单元负载和/或双向载重穿梭机在各层之间的交换优选地通过固定式专用升降机来执行,该固定式专用升降机可以与双向载重穿梭机和自主移动机器人(amr)或自动导引车(agv)两者对接。
11、如果固定式专用升降机是混合升降机,该混合升降机被配置为:使用在升降平台上交错的侧面支承件以彼此上下堆叠的布置同时运输单元负载和/或双向载重穿梭机和/或自主移动机器人(amr)或自动导引车(agv)两者,其中,单元负载侧面支承件位于最外侧并且相对于升降平台能够竖直伸缩,单元负载和车辆的交换可以同时进行,并且2d载重穿梭机和amr或agv之间的单元负载的交接也可以在升降机上进行。这提高了吞吐量。
12、任选地,可以使用叉车与高架2d穿梭机操作的货架层之间的直接叉车对接。这可以实施为叉车可进入的专用外向车道。
13、在一个实施例中,根据本发明的订单履行系统的特征在于,地面层存储区中的单元负载存储在固定式或移动式支承框架上。
14、通过另外地包括地面层缓冲区和/或地面层货物进口和/或地面层装运区(每个区均以物料流方式连接并由自主移动机器人(amr)和/或自动导引车(agv)提供服务),可以实现amr/agv在整个订单履行系统中的集成和使用。然后,该控制器能够操作以控制同一自主移动机器人(amr)或自动导引车(agv)用于地面层存储操作和从源位置到地面层存储区以及从地面层存储区到仓库目的地的运输两者,并且服务于所有这些操作而无需在存储系统的入口/出口处的交接过程。
15、优选地,控制器能够操作以控制地面层缓冲区用于缓冲具有慢速移动装置和/或快速移动装置的单元负载,直到用于履行订单的所有单元负载是可用的并且这些单元负载可以被运输到地面层装运区、处理区或拣选区。
16、控制器能够操作以控制地面层存储区,以用于缓冲目的以将用于订单履行的所有单元负载源源不断地提供给地面层订单处理和履行区,和/或以用于从地面层订单履行区拣选的单元负载的中间存储。
17、术语“单元负载”是指为便于存储和搬运而将多个单独物品组合成的组合体的大小,例如托盘负载表示可以使用托盘千斤顶或叉车轻松移动的单元负载,或者集装箱负载表示用于装运目的的单元。单元负载可以紧密地装入仓库货架、联运集装箱、卡车或棚车中,但可以在配送点(通常是配送中心、批发商或零售店)轻松拆开以出售给消费者或使用。因此,目前意义上的单元负载尤其是托盘、防滚架和移动搁架。
18、与结构化技术(固定式基础设施)相比,自主移动机器人(amr)和/或自动导引车(agv)的使用允许灵活使用可用空间并在需要时改变路线。
19、自动导引车(agv)被定义为:移动式自动驾驶运输平台,其通常遵循给定路线(例如沿着地板上标记的长线或电线),或使用无线电波、视觉相机、磁体或激光来导航和运输通常(但不限于)形式为托盘负载的物体。它们能够根据预定义的路线等来自动移动和拣选制造设施、配送中心、仓库中的物体。
20、自主移动机器人(amr)类似于agv。amr通常比agv更复杂,并且能够动态导航并规划自己的路径。它通常配备机载装置以了解操作环境并对操作环境做出反应。这使其在多个订单履行使用应用中具有高度灵活性。它们均将物品运送到某个地点或从某个地点运出。
21、优选而言,成品载架借助于所述amr和/或agv从所述供应层中的手动包装站点自动卸载。换言之,amr和/或agv不仅用于向站点供应物体,还用于卸载成品载架,并且然后可以运输到装运区。也可以使用amr和/或agv来供应空载载架。
22、在一个优选实施例中,根据空间布置的物体借助于amr和/或agv以分组方式(尤其是托盘上)从诸如托盘仓库的预拣选设施供应在供应层中。这可以简化和优化工作站点的拣选过程。这还允许(与计算机辅助空间布置一起)对物体(供体)进行严格排序。
23、amr/agv用于包括产品的缓冲和合并的地面层存储操作以及从源位置到仓库目的地的仓库运输。同一amr/agv可以用于满足所有这些目的而无需在存储系统的入口/出口处的交接过程,以实现更高效、快速和可扩展的操作,并应对各种操作需求的波动。
24、订单履行系统的功能如下:
25、在高架存储区中,传入产品(慢速移动装置)的单元负载(例如托盘)存储在由2d载重穿梭机提供服务的高密度货架中。它们用于水平地运输单元负载并运输至升降机进行竖直移动。可以调整穿梭机的数量,以适应影响产品洗选频率的所需吞吐量和产品混合的变化。快速移动装置在高架存储区下方直接存储在移动支承件上的存储区中的地面上。
26、在接收到要进行订单履行的(出库)订单后,订单的物品(位于单元负载内,例如托盘)在仓库管理系统(wms)(控制器)的控制下被发送到缓冲区。物品由amr或agv运输,这简化了源单元负载(托盘)的排序并加快了拣选过程。
27、在地面层订单履行区的箱子拣选工作站,操作人员从供体单元负载中拣选箱子,并根据wms提供的预先计算的堆叠模式将其堆叠在订单载架(例如目标托盘)上。拣选工作站处的界面为操作人员提供了重要信息(包括数量),并且激光指示器指定了箱子在订单载架上的放置位置。当另一个工作站需要同一供体单元负载时,amr/agv将其移动到下一个工作站,并且新的单元负载可能会被带到先前的拣选工作站以继续拣选新物品。
28、在出口和卡车装载或装运区,自动叉车将订单载架(目标托盘)装载到卡车上,以采用最佳堆叠方式进行调度,以最大限度地利用卡车空间。
29、订单履行系统可以根据下面描述的被称为“机场出发”策略的操作策略进行操作。根据此操作原理,只有包含相关源单元或者是完整的源单元的单元负载才会借助于amr/agv被转移到选定的履行区。源单元负载或产品单元负载是包括为履行特定订单而选择的物品的单元。履行区内的具体位置是基于amr/agv移动的最小化以及拣选工作站处的订单利用和分配来选择的。换言之,出于拣选和/或合并的目的,所选择的amr/agv能够最大限度地减少用于订单处理的产品单元负载的移动,并且订单可以在一个单独的履行区或单个拣选工作站处完成,作为订单单元负载的订单载架在该工作站处完成来自相应产品单元负载的订单的所有物品。订单单元负载可以从拣选工作站转移回到存储区或缓冲区以在其中临时存储和合并,或者可以被转移到装运区。
30、虽然由2d载重穿梭机提供服务的高架存储密度很高,但它在取回和提供订单履行所需的相应单元负载的速度方面存在很大偏差。取回提前时间很大程度上取决于必须移开多少单元负载才能存取所需的单元负载,以及有多少个2d载重穿梭机可以用于执行此类工作。通过使用地面层amr/agv,一旦地面层缓冲区上存在特定订单所需的所有单元负载,就可以通过在地面层上的缓冲区中将所需的单元负载缓冲然后将它们分组运输到拣选区/订单区/处理区/调度区来解决此问题。这使得所有需要的物品在需要的位置同时可用。例如,在拣选工作站中,可以立即执行拣选,不会有等待单元负载上来自由2d载重穿梭机提供服务的高架存储区的物品的延迟。
- 还没有人留言评论。精彩留言会获得点赞!