一种叉车位置监控方法、系统和仪表与流程
本发明涉及车辆监控,尤其涉及一种叉车位置监控方法、系统和仪表。
背景技术:
1、叉车作为非道路特种车辆,其工作区域范围有限,目前叉车的车辆管理平台大多不能有效监控车辆在其限定区域的位置,无法有效防止叉车驶出指定区域而造成安全隐患。因此,有必要设计一种叉车位置监控方法。
技术实现思路
1、本发明提供了一种叉车位置监控方法、系统和仪表,以实现对限定工作区域叉车的管控。
2、根据本发明的一方面,提供了一种叉车位置监控方法,该叉车位置监控方法包括:
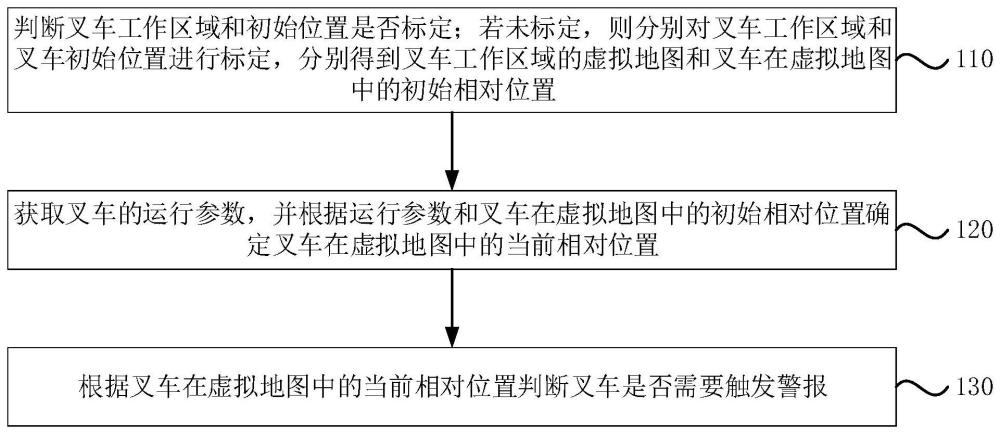
3、判断叉车工作区域和初始位置是否标定;若未标定,则分别对叉车工作区域和叉车初始位置进行标定,分别得到叉车工作区域的虚拟地图和叉车在所述虚拟地图中的初始相对位置;
4、获取叉车的运行参数,并根据所述运行参数和叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置;
5、根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报。
6、可选地,所述对叉车工作区域进行标定,得到工作区域的虚拟地图,包括:
7、获取所述工作区域的各个顶点的位置信息;
8、根据所述工作区域的各个顶点的位置信息确定所述工作区域的虚拟地图。
9、可选地,所述获取所述工作区域的各个顶点的位置信息,包括:
10、通过gps定位获取所述工作区域的各个顶点的位置信息。
11、可选地,所述根据所述运行参数和叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置,包括:
12、根据所述运行参数计算所述叉车的位移;
13、根据所述叉车的位移、所述叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置。
14、可选地,所述运行参数至少包括叉车的运行速度和转向角度。
15、可选地,所述根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报,包括:
16、判断所述叉车在所述虚拟地图中的当前相对位置是否满足第一预设范围,若是,则判定叉车处于告警区域并发出告警信息。
17、可选地,所述根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报,包括:
18、判断所述叉车在所述虚拟地图中的当前相对位置是否满足第二预设范围,若是,则判定叉车超出管控范围并发出停止运行指令。
19、可选地,该叉车位置监控方法还包括:若叉车工作区域和初始位置已经标定,则从存储器中获取叉车工作区域的虚拟地图和叉车在所述虚拟地图中的初始相对位置。
20、根据本发明的另一方面,提供了一种叉车位置监控系统,该叉车位置监控系统包括:
21、标定判断模块,用于判断叉车工作区域和初始位置是否标定;
22、虚拟地图标定模块,用于对叉车工作区域和进行标定,得到叉车工作区域的虚拟地图;
23、初始位置标定模块,用于对叉车初始位置进行标定,得到叉车在所述虚拟地图中的初始相对位置;
24、运行参数获取模块,用于获取叉车的运行参数;
25、当前相对位置确定模块,用于根据所述运行参数和叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置;
26、触发警报判断模块,用于根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报。
27、根据本发明的另一方面,提供了一种仪表,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,该仪表还包括:人机交互模块,用于显示叉车运行参数和位置信息;gps定位模块,用于标定虚拟地图时提供定位信息;其中,所述处理器执行所述程序时实现如第一方面所述的方法。
28、本发明实施例的技术方案,通过提供一种叉车位置监控方法、系统和仪表,该叉车位置监控方法包括:判断叉车工作区域和初始位置是否标定;若未标定,则分别对叉车工作区域和叉车初始位置进行标定,分别得到叉车工作区域的虚拟地图和叉车在所述虚拟地图中的初始相对位置;获取叉车的运行参数,并根据所述运行参数和叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置;根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报。由此可知,通过该方法可以实现对限定工作区域叉车的管控。且与现有技术相比,通过在车辆本地绘制虚拟地图,不完全依赖于信号传输和gps定位,具有更高的可靠性和安全性,且方案成本低,符合实际的工作场景。
29、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种叉车位置监控方法,其特征在于,包括:
2.根据权利要求1所述的叉车位置监控方法,其特征在于,所述对叉车工作区域进行标定,得到工作区域的虚拟地图,包括:
3.根据权利要求2所述的叉车位置监控方法,其特征在于,所述获取所述工作区域的各个顶点的位置信息,包括:
4.根据权利要求1所述的叉车位置监控方法,其特征在于,所述根据所述运行参数和叉车在所述虚拟地图中的初始相对位置确定叉车在所述虚拟地图中的当前相对位置,包括:
5.根据权利要求4所述的叉车位置监控方法,其特征在于,所述运行参数至少包括叉车的运行速度和转向角度。
6.根据权利要求1所述的叉车位置监控方法,其特征在于,所述根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报,包括:
7.根据权利要求1所述的叉车位置监控方法,其特征在于,所述根据叉车在所述虚拟地图中的当前相对位置判断叉车是否需要触发警报,包括:
8.根据权利要求1所述的叉车位置监控方法,其特征在于,还包括:若叉车工作区域和初始位置已经标定,则从存储器中获取叉车工作区域的虚拟地图和叉车在所述虚拟地图中的初始相对位置。
9.一种叉车位置监控系统,其特征在于,包括:
10.一种仪表,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,还包括:人机交互模块,用于显示叉车运行参数和位置信息;gps定位模块,用于标定虚拟地图时提供定位信息;其中,所述处理器执行所述程序时实现如权利要求1-8任一项所述的方法。
技术总结
本发明公开了一种叉车位置监控方法、系统和仪表。该叉车位置监控方法包括:判断叉车工作区域和初始位置是否标定;若未标定,则分别对叉车工作区域和叉车初始位置进行标定,分别得到叉车工作区域的虚拟地图和叉车在所述虚拟地图中的初始相对位置;获取叉车的运行参数,并根据运行参数和叉车在虚拟地图中的初始相对位置确定叉车在虚拟地图中的当前相对位置;根据叉车在虚拟地图中的当前相对位置判断叉车是否需要触发警报。由此可知,通过该方法可以实现对限定工作区域叉车的管控。与现有技术相比,通过在车辆本地绘制虚拟地图,不完全依赖于信号传输和GPS定位,具有更高的可靠性和安全性,且方案成本低,符合实际的工作场景。
技术研发人员:高巽,张平化,孟凡己
受保护的技术使用者:凡己科技(苏州)有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!