一种新型高稳定多连杆垂直升降机构的制作方法
本发明涉及自动化机电设备,具体涉及一种新型高稳定多连杆垂直升降机构。
背景技术:
1、升降机构是一种常用的升降设备,在许多领域具有广泛的应用,目前升降行程大且降落状态高度小的升降机构主要有剪刀叉和多连杆两种结构形式。
2、传统的剪刀叉结构需在铰接副的基础上增加一套滑动副,该滑动副大大降低了升降机构的稳定性;并且在起升到最高点时,由于滑动副的相对运动,升降台面将处于悬臂状态,影响升降机构的整体受力状态及其稳定性。而传统的多连杆结构,大多不能够解决上安装板在升降过程中的垂直起降问题。且其在最低点时,传动机构为费力机构,这就导致较小的外部扰动力就会使升降台面有较大的跳动量。
3、以上因素制约了传统升降机构在车载或船载等存在颠振、倾斜或紧急加减速等环境下使用。
技术实现思路
1、本发明的目的是为了解决在车载、船载等存在颠振、倾斜或紧急加速等应用环境,由于升降机构上所安装载荷重心的跳动以及复杂使用工况的影响,各种类型升降机的叉臂结构会产生较大的变形,导致各类型升降机整体抗振、抗颠及抗偏载能力差,稳定性不足的问题,而提供一种新型高稳定多连杆垂直升降机构。
2、为了解决上述现有技术所存在的不足之处,本发明提供了如下技术解决方案:
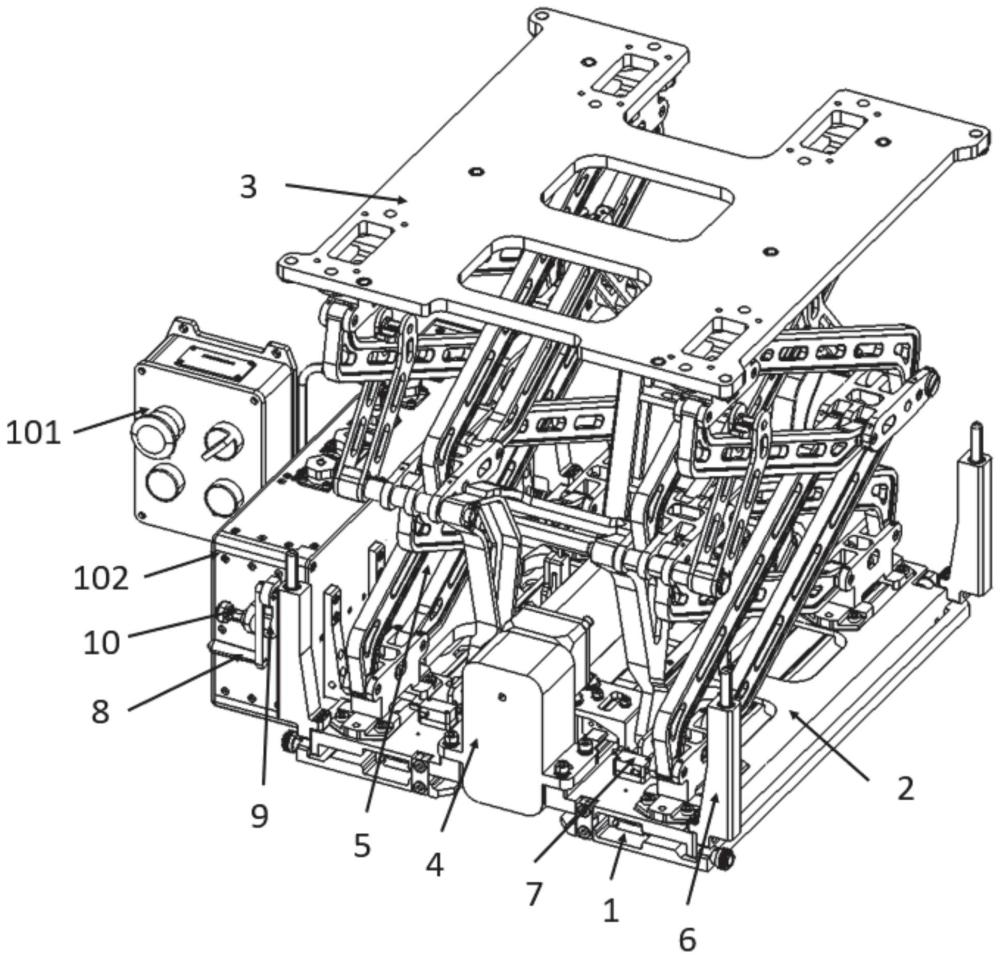
3、一种新型高稳定多连杆垂直升降机构,其特殊之处在于:包括由下至上依次设置的底座、升降底板和升降台面,以及丝杠传动机构和叉臂组件;
4、所述丝杠传动机构用于驱动叉臂组件上升、下降,其包括设置在升降底板上的反向丝杠、驱动机构、丝杠支座和两个直线导轨;所述反向丝杠的一端连接所述驱动机构的驱动端,另一端连接所述丝杠支座,反向丝杠上套设有两个丝杠螺母,每个丝杠螺母上连接有一个滑块;所述两个直线导轨对称设置在反向丝杠两侧,直线导轨上设置两个所述滑块,两个所述滑块的运动方向相反;
5、所述叉臂组件包括两个叉臂单元和四个辅助叉臂单元,每个叉臂单元包括连杆组件和两个对称设置在所述反向丝杠两侧的升降单元;
6、每个升降单元包括依次连接的第一铰支座、第一叉臂、连接板、第二叉臂和第二铰支座,所述第一铰支座和第二铰支座分别与升降台面和升降底板固定;所述第一叉臂和第二叉臂的结构相同,均包括两个支臂杆,第一叉臂的两个支臂杆的上端分别与第一铰支座铰接,形成第一铰接点和第二铰接点,下端分别与连接板铰接,形成第三铰接点和第四铰接点,第二叉臂的两个支臂杆的上端分别与连接板在第三铰接点和第四铰接点处铰接,下端分别与第二铰支座铰接,形成第五铰接点和第六铰接点,第一铰接点、第二铰接点、第三铰接点和第四铰接点之间的连线构成一个平行四边形,第三铰接点、第四铰接点、第五铰接点和第六铰接点之间的连线构成一个平行四边形;
7、所述连杆组件用于使对应叉臂单元中的两个升降单元同步升降,其包括平行升降底板设置的连接部和垂直升降底板设置的支撑部,支撑部的下端与滑块铰接,上端套设在连接部上,连接部的两端分别和对应叉臂单元中的两个升降单元的连接板铰接;两个叉臂单元中位于反向丝杠同侧的升降单元沿其中垂线呈180°旋转对称;
8、每个所述辅助叉臂单元的一端与一个升降单元的连接部铰接,另一端与另一个升降单元的第一叉臂铰接。
9、进一步地,每个所述辅助叉臂单元包括平行设置的两个辅助叉臂,以及中间铰接座、中间件;两个辅助叉臂的下端与一个升降单元的连接部铰接,上端通过所述中间铰接座、中间件与一个升降单元的第一叉臂的一个支臂杆铰接,中间铰接座设置在另一个升降单元的第一叉臂的一个支臂杆上,中间件的中部与中间铰接座连接,两端分别与两个辅助叉臂的上端铰接。
10、进一步地,所述两个辅助叉臂的下端通过轴套与一个升降单元的连接部铰接,连接部依次穿过一个辅助叉臂的下端、轴套上的腰形孔、另一个辅助叉臂的下端,两个辅助叉臂的下端分别与轴套的两侧固定。轴套可以有效吸收支臂在受力变形过程中产生的能量,减少用于传动的组件的变形量,从而提高升降机构的稳定性。
11、进一步地,还包括控制盒、接线盒、应急手柄和手柄安装架;
12、所述控制盒用于控制接线盒内的电气元器件,进而控制丝杠传动机构;所述手柄安装架设置在接线盒的外壁上,用于放置所述应急手柄,应急手柄包括手柄连杆,以及设置在手柄连杆两端的手柄和安装杆;
13、所述驱动机构包括固定设置在升降底板上的步进电机和减速机,所述反向丝杠的一端连接减速机的输出端;减速机为双输入单输出型式,一端输入轴与步进电机通过联轴器连接,另一端输入轴用于与安装杆连接,以在紧急情况下由人工操作进行升降。
14、进一步地,所述手柄安装架包括安装平板和l型支架,所述安装平板的上部设置有与应急手柄的安装杆适配的预留孔,所述l型支架设置在安装平板的下部,且与安装平板形成限位槽,l型支架上设置有垂直安装平板的限位通孔,限位通孔内设置有弹簧柱塞,弹簧柱塞用于依次穿过限位通孔、手柄上设置的定位孔,实现对应急手柄的固定。
15、进一步地,所述底座上通过多级滑轨组设置所述升降底板,底座上设置有两个万向球滚道,两个万向球滚道上均设置有耐磨层;
16、所述升降底板下方设置有与两个万向球滚道对应的多个万向球,用于升降底板在多级滑轨组上滑动时对升降底板滚动支撑。
17、进一步地,所述底座的后端端部设置有限位块,前端端部通过多个定位销与升降底板固定,两个侧面均设置有一个用于对升降底板紧固并限位的旋钮柱塞。
18、进一步地,所述底座上设置有多个固定孔,用于通过螺钉将底座固定于预设位置。当升降机构发生不可修复的毁坏时,随行操作人员可快速通过底座拆除整机,并进行更换,从而保障整机作业任务的顺利完成。
19、进一步地,所述底座和升降底板上均设置有两个定位柱组件,每个定位柱组件包括用于限定叉臂组件的下降位置的下降限位开关;四个定位柱组件分别与升降台面的四角对应;
20、所述升降底板上沿所述反向丝杠对称设置有两个上升限位开关组,用于通过测量滑块的位置限制叉臂组件的上升位置。
21、与现有技术相比,本发明的有益效果是:
22、(1)本发明一种新型高稳定多连杆垂直升降机构,包括底座、升降底板、升降台面、丝杠传动机构和叉臂组件,叉臂组件包括两个叉臂单元和四个辅助叉臂单元;
23、两个叉臂单元共设置有两个连杆组件和四个升降单元,四个升降单元通过四个第一铰支座与升降台面固定,通过四个第二铰支座与升降底板固定,使得升降台面、升降底板上均有四个受力点,并且每个升降单元设置有第一铰接点、第二铰接点、第三铰接点、第四铰接点、第五铰接点和第六铰接点,构成两个近似平行四边形的结构,通过两个连杆组件约束升降台面仅具备竖直升降的自由度;相较于传统的剪刀叉结构需在铰接副的基础上增加一套滑动副,本发明的升降台面相对升降底板几乎不会有水平方向的位置,提高了结构稳定性;
24、本发明升至最高位置时,每个平行四边形的锐角和钝角之间的角度差值最小,结构稳定性较强,本发明降至最低位置时,每个平行四边形的锐角和钝角之间的角度差值最大,结构稳定性最差,为避免载荷中心偏置造成的单个升降单元受力过大,支臂杆变形,本发明将两个辅助叉臂单元作为一组,两组辅助叉臂单元使四个升降单元整体连接在一起,在升起、降下的运动过程中作为一个整体共同承担载荷,解决了在负载变化或外界干扰的情况下,由载荷重心偏移引起的各升降单元承力不均匀造成的起降过程振动较大,抗震性能较差,稳定性下降的问题,在颠簸、冲击、震动环境(如车载、船载)下,可以固定并保证载荷与安装环境不发生相对运动,可广泛应用于各种类型的连杆式升降机。
25、(2)本发明一种新型高稳定多连杆垂直升降机构,两个辅助叉臂的下端通过带腰形孔的轴套与一个升降单元的连接部铰接,且两个辅助叉臂的下端分别与轴套的两侧固定;由于每个升降单元在升降过程中,两个辅助叉臂的下端与升降单元的连接部之间会产生微小的相对位移,为避免微小的相对位移引起升降单元的较大振动,轴套上设置有腰形孔,使得升降单元的连接部在升降过程始终与腰形孔内壁抵接,从而通过轴套有效吸收支臂在受力变形过程中产生的能量,减少用于传动的组件的变形量,进一步提高升降机构的稳定性。
26、(3)本发明一种新型高稳定多连杆垂直升降机构中,设置有应急手柄和手柄安装架,剪叉式升降机构正常工作时,应急手柄放置在手柄安装架中。当在紧急情况下需要人工升降时,可将应急手柄与减速机的一端输入轴连接;当需要对升降底板上的丝杠传动机构和叉臂组件进行维护、保养、检修时,可通过应急手柄的安装杆拆卸定位销,进而人工抓握升降台面上设置的通孔将升降底板通过多级滑轨组拉出,本发明提高了升降机构的可维修性。
27、(4)本发明一种新型高稳定多连杆垂直升降机构中,升降底板与底座之间通过多级滑轨组滑动连接,并通过多个万向球滚动支撑,可沿多级滑轨组滑动的方向将升降底板整体拉出,便于人工操作,提高维修效率;本发明具备随时拆卸、维护保养的功能。在野外有限资源的局限下,随行操作人员能够快速实现升降机构的维护、保养,甚至是简单故障排除。
28、(5)本发明一种新型高稳定多连杆垂直升降机构中,底座上设置有多个固定孔,用于通过螺钉将底座固定于预设位置,当升降机构发生不可修复的毁坏时,随行操作人员可快速将其拆除,并进行更换,从而保障整机作业任务的顺利完成。
- 还没有人留言评论。精彩留言会获得点赞!