一种全自动超声波扫描显微镜上下料机的制作方法
本发明涉及超声波扫描,具体涉及一种全自动超声波扫描显微镜上下料机。
背景技术:
1、在工业生产中,在生产完工件后,还需要对工件质量进行质检,而随着科技的进步,超声波扫描技术也逐渐应用到工件的质检当中,能够对工件进行探伤,因其探伤过程不会损坏工件和原材料的工作状态,且对被检验部件的表面和内部质量均能进行检测,因此现已被广泛应用。
2、而现有的超声波扫描模式为人工手动将产品放入扫描治具中进行超声波扫描,扫描模式单一无法适应多种产品,且无法实现扫描自动化,因此在现有技术中就存在扫描模式单一,上下料为人工取放、节拍慢,人工取放有损伤产品的风险,扫描完毕后产品表面有水渍,进而损坏产品的问题。
技术实现思路
1、本发明的目的在于:为解决上述扫描模式单一、节拍慢,人工取放有损伤产品的风险,扫描完毕后产品表面有水渍,进而损坏产品的问题,本发明提供了一种全自动超声波扫描显微镜上下料机。
2、本发明为了实现上述目的具体采用以下技术方案:
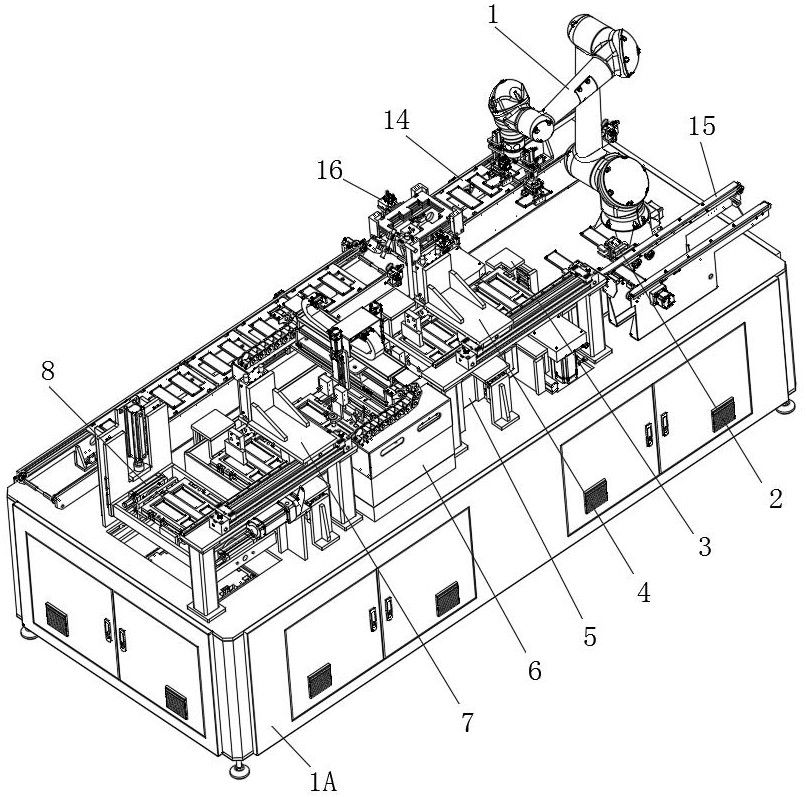
3、一种全自动超声波扫描显微镜上下料机,包括机体、产品和防水治具,还包括:
4、机器人上下料工位,所述机器人上下料工位固定安装在所述机体右侧的顶部,能够对产品进行扫码,并进行抓取拿放;
5、产品翻面工位,所述产品翻面工位设置在所述机体的顶部,且位于所述机器人上下料工位的前侧,能够夹紧产品并旋转180°完成翻面;
6、治具扣合反压工位和顶升加压工位,所述治具扣合反压工位和顶升加压工位设置在所述产品翻面工位的左侧,所述治具扣合反压工位配合顶升加压工位对产品和防水治具扣合压紧,其中所述治具扣合反压工位包括防水治具弹簧压扣、防水治具弹簧压扣打开气缸、扣合反压工位加压顶升电缸、扣合反压工位避让气缸,所述治具扣合反压工位中放置有防水治具,所述治具扣合反压工位中防水治具的外围设置有防水治具弹簧压扣,所述防水治具弹簧压扣的下方设置有防水治具弹簧压扣打开气缸,所述治具扣合反压工位中防水治具的左右两侧设置有扣合反压工位加压顶升电缸,所述扣合反压工位加压顶升电缸的前侧设置有扣合反压工位避让气缸;
7、治具入水上料工位,所述治具入水上料工位位于所述治具扣合反压工位的左侧,能够抓取防水治具放入水槽输送线上;
8、水槽工位,所述水槽工位位于治具入水上料工位的左侧,能够将防水治具输送到待扫描工位;
9、超声波扫描工位,所述超声波扫描工位位于水槽工位的左侧,能够对输送到待扫描工位的防水治具中的产品进行扫描;
10、治具出水下料工位,所述治具出水下料工位位于超声波扫描工位的左侧,能够对防水治具进行抓取,并移动至治具翻转下降工位;
11、治具翻转下降工位,所述治具翻转下降工位位于治具出水下料工位的左侧,能够对防水治具进行翻面并下降至治具清扫工位中;
12、治具清扫工位,所述治具清扫工位位于治具出水下料工位的下侧,能够对防水治具整体进行吹扫;
13、移栽工位一、中转输送工位、移栽工位二,所述移栽工位一、中转输送工位、移栽工位二位于治具清扫工位的右侧,所述移栽工位一能够将吹扫完成的防水治具抬升并移动至中转输送工位上,所述中转输送工位将防水治具翻转180°后再由移栽工位二将其放置在顶升加压工位上,所述顶升加压工位将防水治具抬升至治具扣合反压工位将防水治具上盖打开,便于机器人上下料工位抓取。
14、进一步地,还包括:
15、产品托盘上下料输送线,所述产品托盘上下料输送线位于所述机体的后侧,用于产品托盘上下料;
16、产品ng排料输送线,所述产品ng排料输送线位于所述机器人上下料工位前侧,用于输送ng产品;
17、产品托盘堆栈工位,所述产品托盘堆栈工位位于所述产品托盘上下料输送线的上方,用于产品托盘的堆栈。
18、进一步地,所述机器人上下料工位包括有协作机器人、机器人升降气缸、机器人夹爪气缸和机器人扫描头,所述协作机器人抓取臂的底部安装有机器人升降气缸,所述机器人升降气缸的底部安装有机器人夹爪气缸,所述机器人升降气缸一侧且位于机器人夹爪气缸的上方安装有机器人扫描头,所述机器人扫描头能够对机器人夹爪气缸抓取的产品进行扫描。
19、进一步地,所述机器人升降气缸、机器人夹爪气缸共有两组,能同时对两个产品进行抓取。
20、进一步地,所述产品翻面工位包括有翻面工位翻转气缸和翻面工位夹紧气缸,所述翻面工位夹紧气缸能够对产品进行夹取。
21、进一步地,所述超声波扫描工位包括有扫描工位大理石平台、扫描工位x轴直线电机、扫描工位y轴直线电机、扫描工位z轴kk模组、扫描工位超声波探头,所述扫描工位大理石平台的顶端安装有扫描工位x轴直线电机,所述扫描工位大理石平台的顶端扫描工位x轴直线电机的两侧安装有扫描工位y轴直线电机,所述扫描工位x轴直线电机的顶部安装有扫描工位z轴kk模组,所述扫描工位z轴kk模组的底部安装有扫描工位超声波探头。
22、进一步地,所述扫描工位z轴kk模组和扫描工位超声波探头的数量为两组,能同时对两个防水治具中的产品进行扫描。
23、进一步地,所述治具翻转下降工位包括有翻转下降工位底部夹紧气缸、翻转下降工位旋转气缸、翻转下降工位滑块导轨、翻转下降工位升降气缸,所述翻转下降工位底部夹紧气缸位于防水治具的前后两侧,所述翻转下降工位旋转气缸位于防水治具的左右两侧,所述翻转下降工位底部夹紧气缸、翻转下降工位旋转气缸整体的一侧设置有翻转下降工位滑块导轨,所述翻转下降工位底部夹紧气缸、翻转下降工位旋转气缸整体的顶部连接有翻转下降工位升降气缸。
24、进一步地,所述治具清扫工位包括有清扫工位上升气缸、清扫工位下降气缸、清扫工位吹气风刀、风刀横移气缸、清扫箱开合盖横移气缸,所述治具清扫工位的内部可放置防水治具,所述治具清扫工位内防水治具的后侧安装有清扫工位上升气缸,所述治具清扫工位内防水治具的左右两侧安装有清扫工位下降气缸,所述治具清扫工位内防水治具的左右两侧和前侧安装有清扫工位吹气风刀,所述治具清扫工位内左侧安装有清扫箱开合盖横移气缸。
25、进一步地,所述中转输送工位位于移栽工位一和移栽工位二之间,且所述中转输送工位包括有中转工位夹紧气缸、中转工位旋转气缸、中转工位输送机,所述中转工位夹紧气缸、中转工位旋转气缸共有两组,且两个所述中转工位旋转气缸均位于中转工位夹紧气缸的内侧,两个所述中转工位旋转气缸之间放置有防水治具,所述中转工位夹紧气缸、中转工位旋转气缸的底部设置有中转工位输送机,所述移栽工位一包括有移栽工位一承托气缸一、移栽工位一承托气缸二、移栽工位一横移气缸,所述移栽工位二包括有移栽工位二承托气缸、移栽工位二横移气缸。
26、本发明的有益效果如下:
27、本发明,通过机器人上下料工位的设计,能够产品进行自动化的取放动作,同时进行扫码完成信息的绑定,无需人工手动操作,取放动作能不间断完成,节省节拍,同时避免人工取放对产品的损坏,进而影响检测。
28、本发明,通过超声波扫描工位的设计,通过xy直线电机平台在满足检测要求的情况下实现对产品位置测量的高速精确移动,实现对产品某个点位的快速探伤测量,同时利用z轴kk模组可根据产品厚度进行上下自动调整探头与产品表面之间的距离,保证扫描精度和速率的同时,也能够适应于多种产品,避免扫描模式的单一。
29、本发明,通过治具清扫工位的设计,够自动对扫描完毕后带水渍的产品进行封闭式清扫,避免产品的损坏。
30、本发明,通过整体机械自动化的设计,可根据客户要求对接产线,方便快捷满足客户的生产要求。
- 还没有人留言评论。精彩留言会获得点赞!