一种浮动锁紧小车运输方法、系统、存储介质及智能终端与流程
本技术涉及小车运输的领域,尤其是涉及一种浮动锁紧小车运输方法、系统、存储介质及智能终端。
背景技术:
1、浮动锁紧机构是模拟发射装置产生模拟冲量过程中的重要机构,其主要代替弹丸的浮动活塞和完成锁紧任务的锁键组成。
2、相关技术中,大型工件、例如:车壳这一类工件的运输过程较为困难,当夹持力度过小时车壳本身的重量较大,容易掉落,而夹持力度过大,由于车壳的厚度较薄,容易发生形变,故为了实现对工件的夹持过程中不会因为夹持过紧而损坏,通过会利用浮动锁紧机构作为夹持的设备来进行夹持,然后利用滑动轨道进行滑移运输。
3、现有技术中存在以下问题,虽然小车本身利用了浮动锁紧机构进行锁紧而使得工件不会因为小车而损坏,但是小车运输过程中难以保证外界的碰撞,仍然容易损坏,尚有改进的空间。
技术实现思路
1、为了改善小车运输过程中难以保证外界的碰撞,仍然容易损坏的问题,本技术提供一种浮动锁紧小车运输方法、系统、存储介质及智能终端。
2、第一方面,本技术提供一种浮动锁紧小车运输方法,采用如下的技术方案:
3、一种浮动锁紧小车运输方法,包括:
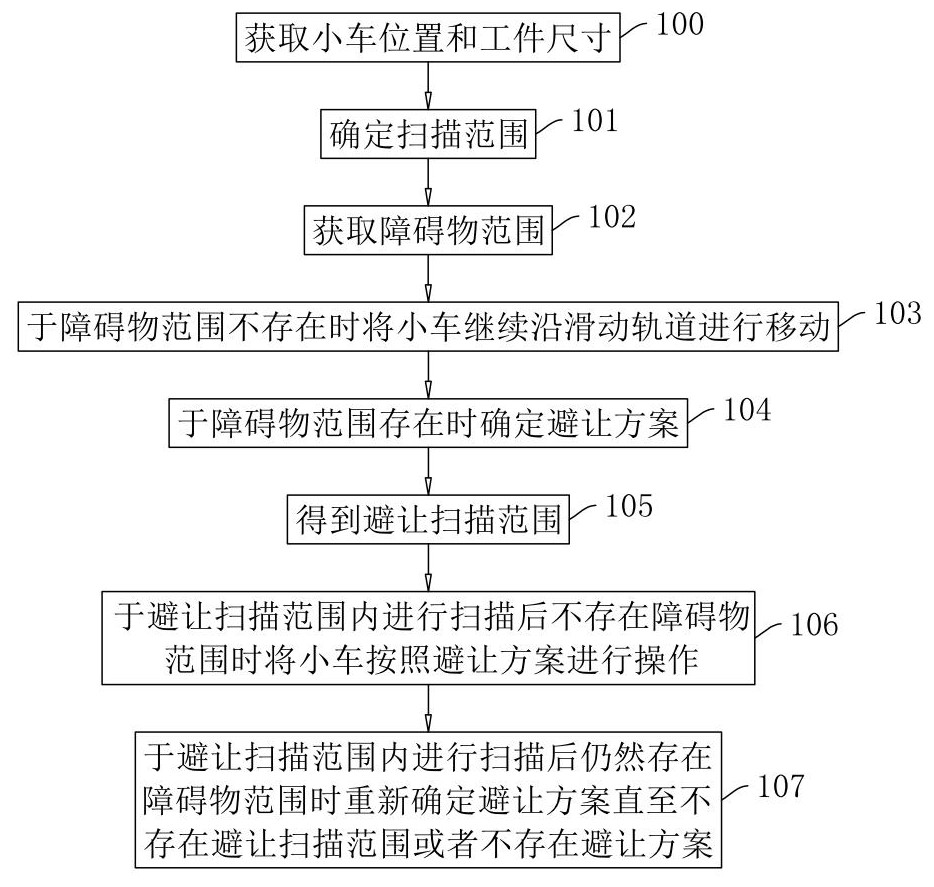
4、获取小车位置和工件尺寸,所述小车包括浮动锁紧机构、水平转动机构、竖直升降机构和横向移动机构;
5、基于小车位置、工件尺寸、预设的滑动轨道、可动范围和反应距离确定扫描范围;
6、于扫描范围内进行扫描以获取障碍物范围;
7、当障碍物范围不存在时将小车继续沿滑动轨道进行移动;
8、当障碍物范围存在时基于障碍物范围和工件尺寸确定避让方案;
9、基于避让方案对扫描范围进行更新以得到避让扫描范围;
10、于避让扫描范围内进行扫描后不存在障碍物范围时将小车按照避让方案进行操作;
11、于避让扫描范围内进行扫描后仍然存在障碍物范围时重新确定避让方案直至不存在避让扫描范围或者不存在避让方案。
12、通过采用上述技术方案,通过在小车移动过程中对前方能够充分进行反应的位置范围内进行扫描从而识别出障碍物,然后根据障碍物的位置查找避让的方案,使得车壳在小车运输过程中不会和路径上的障碍物碰撞而损坏,提高了工件运输过程中的安全性。
13、可选的,基于障碍物范围和工件尺寸确定避让方案的方法包括:
14、基于工件尺寸中的工件宽度、工件高度和预设的放置基准点确定工件宽度范围;
15、基于障碍物范围和工件宽度范围确定交错范围;
16、基于交错范围和预设的留空避让距离确定供选移动矢量;
17、基于可动范围对供选移动矢量进行筛选以得到符合移动矢量;
18、基于符合移动矢量确定避让方案中的移动类别为平移类别;
19、基于平移类别确定移动装置为竖直升降机构和横向移动机构;
20、将移动装置为竖直升降机构和横向移动机构,移动距离为符合移动矢量作为避让方案进行输出。
21、可选的,将移动装置为竖直升降机构和横向移动机构,移动距离为符合移动矢量作为避让方案进行输出的方法包括:
22、基于滑动轨道、反应距离和小车位置计算出反应位置;
23、基于反应位置和滑动轨道确定反应位置类别;
24、当反应位置类别为直线或圆周拐角时将移动装置为竖直升降机构和横向移动机构,移动距离为符合移动矢量作为避让方案进行输出;
25、当反应位置类别为直线拐角时基于工件长度和预设的放置基准点确定工件长度范围;
26、基于工件长度范围确定位于直线拐角的拐点扫描范围;
27、基于拐点扫描范围和障碍物范围确定拐点交错范围;
28、基于拐点交错范围和留空避让距离确定拐点供选移动矢量;
29、基于可动范围对拐点移动矢量进行筛选以得到符合拐点移动矢量;
30、当符合拐点移动矢量存在时基于符合拐点移动矢量和符合移动矢量确定最终拐点移动矢量;
31、将移动装置为竖直升降机构和横向移动机构,将移动距离为最终拐点移动矢量作为避让方案进行输出;
32、当符合移动矢量不存在时重新基于工件宽度范围对拐点扫描范围进行更新以得到重置扫描范围,并重新确定符合拐点移动矢量,将该符合拐点移动矢量定义为后拐点移动矢量;
33、当后拐点移动矢量存在时重新基于工件长度范围确定位于直线拐角以及以前的扫描范围,将该扫描范围定义为前扫描范围,并重新确定符合拐点移动矢量,将该符合拐点移动矢量定义为前拐点移动矢量;
34、当前拐点移动矢量存在时将移动装置为水平转动机构、竖直升降机构和横向移动机构,移动距离为前拐点移动矢量、后拐点移动矢量和预设的垂直转动角度作为避让方案进行输出,并于输出后将工件长度范围和工件宽度范围进行互换;
35、当前拐点移动矢量不存在或者后拐点移动矢量不存在时输出无法移动信息。
36、通过采用上述技术方案,当小车即将到达拐角点时,则说明此时小车即将拐弯,但是有些小车为了使得车壳较为稳定,通常可能仅是底盘转动而车壳仍然保持原始的朝向,故在拐角处判断车壳沿滑移轨道滑移所扫过的范围时是车壳的长度,故需要判断是否可以采用提前调整角度的方式进行运输,从而使得小车可以在拐点以及拐点前后位置采用将车壳进行转动的方式从而达到避让的效果,提高了避让方案的多样性和灵活性。
37、可选的,将小车按照实际避让方案进行操作的方法包括:
38、获取小车上正在采用的实际避让方案和障碍物范围,将该实际避让方案定义为当前避让方案,将该障碍物范围定义为当前障碍物范围;
39、当再次确定避让方案后将新确定的避让方案定义为预计避让方案;
40、根据预计避让方案进行模拟以得到工件预计范围;
41、当工件预计范围不落入当前障碍物范围时将小车按照预计避让方案进行操作;
42、当工件预计范围落入当前障碍物范围时基于当前避让方案对应的反应位置、小车位置和工件长度范围计算出调整移动距离;
43、小车按照当前避让方案进行操作且向前移动,于移动至调整移动距离时停止移动,然后小车按照预计避让方案进行操作。
44、通过采用上述技术方案,当下一个位置的避让方案会对当前采用的方案对应的障碍物位置造成干扰时,则将小车先移动到当前采用的方案对应的障碍物位置进行避让之后停下来再采用新的避让方案,从而达到能够对所有的障碍物均进行避让,保证了工件的安全性。
45、可选的,还包括当工件预计范围落入当前障碍物范围时小车按照预计避让方案进行操作的方法,该方法包括:
46、将当前避让方案对应的反应位置定义为当前反应位置,将预计避让方案对应的反应位置定义为预计反应位置;
47、根据小车位置、当前反应位置和预计反应位置计算出当前百分比;
48、基于当前百分比、当前避让方案和预计避让方案中各自对应的符合移动矢量确定中途避让方案;
49、基于中途避让方案进行模拟以得到中途工件预计范围;
50、当中途工件预计范围不落入当前障碍物范围时将小车按照预计避让方案进行操作;
51、当中途工件预计范围落入当前障碍物范围时,小车按照当前避让方案进行操作且向前移动,于移动至调整移动距离时停止移动,然后小车按照预计避让方案进行操作。
52、通过采用上述技术方案,当从当前避让方案转化到预计避让方案的过程中刚好小车可以经过当前避让方案对应的障碍物时,则完全可以在移动过程中边转化方案边移动,提高了小车运输的流畅性。
53、可选的,于扫描范围内进行扫描以获取障碍物范围的方法包括:
54、将位于反应距离和小车位置之间的障碍物范围定义为历史障碍物范围;
55、获取沿滑动轨道方向进行扫描的扫描反馈距离;
56、将扫描反馈距离对应的坐标定义为当前坐标,并基于当前坐标形成当前水平轮廓,并将当前水平轮廓记录于历史坐标数据库,将记录于历史坐标数据库的当前水平轮廓定义为历史水平轮廓;
57、基于当前水平轮廓从历史坐标数据库查找出对应的历史水平轮廓;
58、基于当前水平轮廓和历史水平轮廓确定轮廓移动轨迹;
59、基于反应距离所对应的反应时间和轮廓移动轨迹对当前水平轮廓进行模拟以得到预计水平轮廓;
60、当预计水平轮廓中对应的扫描反馈距离小于或等于反应距离时将预计水平轮廓对应的坐标定义为障碍物坐标,并基于障碍物坐标形成障碍物范围。
61、通过采用上述技术方案,通过形成轮廓并且在每一次都进行比对,从而确定相同轮廓的是同一个物体,然后将该物体的移动轨迹进行识别,从而确定障碍物在小车在移动过程中的具体位置,继而确定是否会和未来的时间里的障碍物进行碰撞,提高了障碍物识别的准确性和预判性。
62、可选的,基于当前水平轮廓和历史水平轮廓确定轮廓移动轨迹的方法包括:
63、将当前水平轮廓和任意一个历史水平轮廓进行匹配;
64、当当前水平轮廓和其中一个历史水平轮廓完全一致时将所有的完全一致的历史水平轮廓和当前水平轮廓确定轮廓移动轨迹;
65、当当前水平轮廓和任何一个历史水平轮廓均不一致时确定当前水平轮廓和任何一个历史水平轮廓的相似程度;
66、当相似程度大于预设的临界相同程度时将对应的历史水平轮廓定义为同一水平轮廓;
67、基于同一水平轮廓、当前水平轮廓和剩余的历史水平轮廓重新确定相似程度,并重新确定同一水平轮廓直至不存在剩余的历史水平轮廓或不存在剩余的同一水平轮廓;
68、基于同一水平轮廓和当前水平轮廓确定轮廓移动轨迹以及轮廓变化轨迹,并将两者一并输出。
69、通过采用上述技术方案,当障碍物本身是会发生形态变化时,通过相似度来进行识别,从而确定属于同一个障碍物的轮廓,然后将这些轮廓的变化情况进行识别,从而也确定预计变化的形态,综合考虑障碍物的演变过程,提高了障碍物识别的准确性。
70、第二方面,本技术提供一种浮动锁紧小车运输系统,采用如下的技术方案:
71、一种浮动锁紧小车运输系统,包括:
72、获取模块,用于获取小车位置、工件尺寸、障碍物范围和扫描反馈距离;
73、存储器,用于存储上述任一种浮动锁紧小车运输方法的控制方法的程序;
74、处理器,存储器中的程序能够被处理器加载执行且实现上述任一种浮动锁紧小车运输方法的控制方法。
75、通过采用上述技术方案,通过在小车移动过程中对前方能够充分进行反应的位置范围内进行扫描从而识别出障碍物,然后根据障碍物的位置查找避让的方案,使得车壳在小车运输过程中不会和路径上的障碍物碰撞而损坏,提高了工件运输过程中的安全性。
76、第三方面,本技术提供智能终端,采用如下的技术方案:
77、智能终端,包括存储器和处理器,存储器上存储有能够被处理器加载并执行上述任一种浮动锁紧小车运输方法的计算机程序。
78、通过采用上述技术方案,通过在小车移动过程中对前方能够充分进行反应的位置范围内进行扫描从而识别出障碍物,然后根据障碍物的位置查找避让的方案,使得车壳在小车运输过程中不会和路径上的障碍物碰撞而损坏,提高了工件运输过程中的安全性。
79、第四方面,本技术提供计算机存储介质,能够存储相应的程序,具有反应迅速识别准确的特点。
80、计算机可读存储介质,采用如下的技术方案:
81、计算机可读存储介质,存储有能够被处理器加载并执行上述任一种浮动锁紧小车运输方法的计算机程序。
82、通过采用上述技术方案,通过在小车移动过程中对前方能够充分进行反应的位置范围内进行扫描从而识别出障碍物,然后根据障碍物的位置查找避让的方案,使得车壳在小车运输过程中不会和路径上的障碍物碰撞而损坏,提高了工件运输过程中的安全性。
83、综上所述,本技术包括以下至少有益技术效果:
84、根据障碍物的位置查找避让的方案,使得车壳在小车运输过程中不会和路径上的障碍物碰撞而损坏,提高了工件运输过程中的安全性;
85、判断是否可以采用提前调整角度的方式进行运输,从而使得小车可以在拐点以及拐点前后位置采用将车壳进行转动的方式从而达到避让的效果,提高了避让方案的多样性和灵活性;
86、确定障碍物在小车在移动过程中的具体位置,继而确定是否会和未来的时间里的障碍物进行碰撞,提高了障碍物识别的准确性和预判性。
- 还没有人留言评论。精彩留言会获得点赞!