用于高空作业机械的控制系统的控制方法及控制系统与流程
本发明涉及工程机械领域,具体地涉及一种用于高空作业机械的控制系统的控制方法及控制系统。
背景技术:
1、现有技术中,高空作业机械的作业平台上通常设置有用来检测障碍物的传感器,例如超声波雷达或者毫米波雷达等,通过超声波雷达或者毫米波雷达可以获取障碍物与作业平台的距离信息,进而根据距离信息控制作业平台工作,以实现作业平台的防碰撞等安全保护。然而,如果作业平台上的作业人员将手或者工具伸出作业平台,传感器通常会将其误探测为障碍物,进而引发报警或者限动动作,影响作业人员正常作业,即现有技术存在高空作业机械工作效率不高的问题。
技术实现思路
1、本发明实施例的目的是提供一种用于高空作业机械的控制系统的控制方法、处理器、人体穿戴设备、作业平台控制器、用于高空作业机械的控制系统以及高空作业机械,以解决现有技术存在的高空作业机械工作效率不高的问题。
2、为了实现上述目的,本发明实施例第一方面提供一种用于高空作业机械的控制系统的控制方法,控制系统包括采用无线通信方式进行通信的人体穿戴设备和作业平台控制器,控制方法执行于人体穿戴设备,控制方法包括:
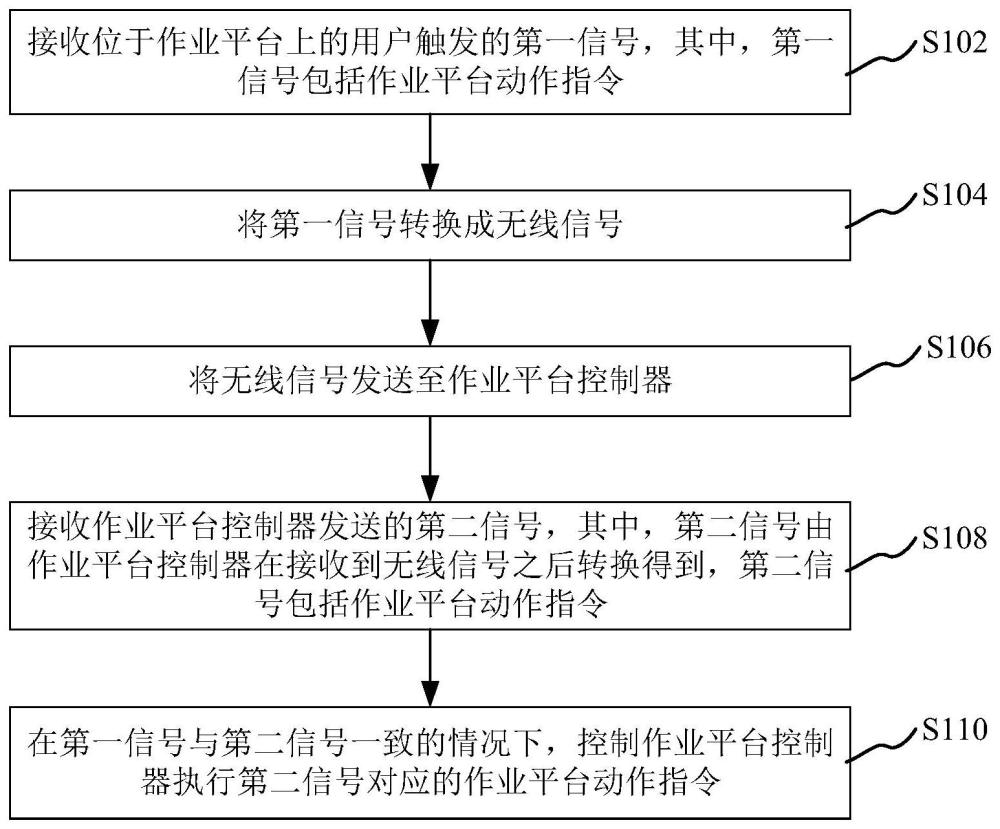
3、接收位于作业平台上的用户触发的第一信号,其中,第一信号包括作业平台动作指令;
4、将第一信号转换成无线信号;
5、将无线信号发送至作业平台控制器;
6、接收作业平台控制器发送的第二信号,其中,第二信号由作业平台控制器在接收到无线信号之后转换得到,第二信号包括作业平台动作指令;
7、在第一信号与第二信号一致的情况下,控制作业平台控制器执行第二信号对应的作业平台动作指令。
8、在本发明实施例中,控制方法还包括:在第一信号与第二信号不一致的情况下,发出报警信号。
9、在本发明实施例中,控制方法还包括:获取无线信号对应的发送时间戳和第二信号对应的接收时间戳;在接收时间戳与发送时间戳之间的间隔时长大于第一预设间隔时长的情况下,发出报警信号。
10、在本发明实施例中,控制方法还包括:在第二预设间隔时长内未接收到第二信号的情况下,发出报警信号。
11、本发明实施例第二方面提供一种用于高空作业机械的控制系统的控制方法,控制系统包括采用无线通信方式进行通信的人体穿戴设备和作业平台控制器,控制方法执行于作业平台控制器,控制方法包括:
12、接收人体穿戴设备发送的无线信号,其中,无线信号由人体穿戴设备在接收到位于作业平台上的用户触发的包括作业平台动作指令的第一信号之后转换得到;
13、将无线信号转换换成第二信号,其中,第二信号包括作业平台动作指令;
14、将第二信号发送至人体穿戴设备;
15、接收并执行人体穿戴设备发送的执行第二信号对应的作业平台动作指令的控制指令,其中,控制指令由人体穿戴设备在确定第一信号与第二信号一致时发出。
16、本发明实施例第三方面提供一种处理器,被配置成执行根据上述的用于高空作业机械的控制系统的控制方法。
17、本发明实施例第四方面提供一种人体穿戴设备,包括:
18、第一信号接收模块,用于接收位于作业平台上的用户触发的第一信号,其中,第一信号包括作业平台动作指令;
19、第一信号转换模块,用于将第一信号转换成无线信号;
20、无线信号传输模块,用于将无线信号发送至作业平台控制器;
21、第二信号接收模块,用于接收作业平台控制器发送的第二信号,其中,第二信号由作业平台控制器在接收到无线信号之后转换得到,第二信号包括作业平台动作指令;
22、动作控制模块,用于在第一信号与第二信号一致的情况下,控制作业平台控制器执行第二信号对应的作业平台动作指令。
23、本发明实施例第五方面提供一种作业平台控制器,包括:
24、无线信号接收模块,用于接收人体穿戴设备发送的无线信号,其中,无线信号由人体穿戴设备在接收到位于作业平台上的用户触发的包括作业平台动作指令的第一信号之后转换得到;
25、无线信号转换模块,用于将无线信号转换换成第二信号,其中,第二信号包括作业平台动作指令;
26、第二信号发送模块,用于将第二信号发送至人体穿戴设备;
27、动作执行模块,用于接收并执行人体穿戴设备发送的执行第二信号对应的作业平台动作指令的控制指令,其中,控制指令由人体穿戴设备在确定第一信号与第二信号一致时发出。
28、本发明实施例第六方面提供一种用于高空作业机械的控制系统,包括:根据上述的人体穿戴设备;以及根据上述的作业平台控制器,人体穿戴设备与作业平台控制器采用无线通信方式进行通信。
29、本发明实施例第七方面提供一种高空作业机械,包括:根据上述的用于高空作业机械的控制系统。
30、上述技术方案,不需要设置传感器检测障碍物,穿戴人体穿戴设备的用户在观察到障碍物后,可以与人体穿戴设备进行人机交互,人体穿戴设备可以与作业平台控制器进行无线通信从而协同操作,实现高空作业机械的作业平台的动作控制,解决了现有技术中由于传感器误报导致高空作业机械工作效率不高的问题,不需要依靠传感器即可实现作业平台的准确控制,提高了用户和高空作业机械的工作效率,降低了因传感器存在视野盲区导致操作人员被障碍物挤压或碰撞的风险,通过比较第一信号和第二信号,可以避免无线传输过程中的数据失真而引起的作业动作误操作,减少了无线传输的数据安全隐患,提高了高空作业的精准度。
31、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于高空作业机械的控制系统的控制方法,其特征在于,所述控制系统包括采用无线通信方式进行通信的人体穿戴设备和作业平台控制器,所述控制方法执行于所述人体穿戴设备,所述控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,所述控制方法还包括:
3.根据权利要求1所述的控制方法,其特征在于,所述控制方法还包括:
4.根据权利要求1所述的控制方法,其特征在于,所述控制方法还包括:
5.一种用于高空作业机械的控制系统的控制方法,其特征在于,所述控制系统包括采用无线通信方式进行通信的人体穿戴设备和作业平台控制器,所述控制方法执行于所述作业平台控制器,所述控制方法包括:
6.一种处理器,其特征在于,被配置成执行根据权利要求1至4中任意一项所述的用于高空作业机械的控制系统的控制方法或者权利要求5所述的用于高空作业机械的控制系统的控制方法。
7.一种人体穿戴设备,其特征在于,包括:
8.一种作业平台控制器,其特征在于,包括:
9.一种用于高空作业机械的控制系统,其特征在于,包括:
10.一种高空作业机械,其特征在于,包括:
技术总结
本发明实施例提供一种用于高空作业机械的控制系统的控制方法及控制系统,属于工程机械领域。该控制系统包括采用无线通信方式进行通信的人体穿戴设备和作业平台控制器,该控制方法执行于人体穿戴设备,该控制方法包括:接收位于作业平台上的用户触发的第一信号,其中,第一信号包括作业平台动作指令;将第一信号转换成无线信号;将无线信号发送至作业平台控制器;接收作业平台控制器发送的第二信号,其中,第二信号由作业平台控制器在接收到无线信号之后转换得到,第二信号包括作业平台动作指令;在第一信号与第二信号一致的情况下,控制作业平台控制器执行第二信号对应的作业平台动作指令。本发明实施例可以提高高空作业机械的工作效率。
技术研发人员:徐运海,龙冶国,楚斯铭,郑波,田超,杨胜虎
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!