一种冷库用叉车剪刀叉前端传感器的布置方法与流程
本发明涉及叉车,具体为一种冷库用叉车剪刀叉前端传感器的布置方法。
背景技术:
1、叉车是一种以货叉为取物装置,能将货物进行点对点搬运的特种设备,在冷库场景中,为了提供仓库空间利用率,通常使用的是双深货架,相应的叉车上也通常搭配上剪刀叉用于第二深位货物的取放。目前市面剪刀叉式前移车普遍还是以人工驾驶为主,这对叉车司机的操作技术要求较高。
2、当叉车在高位取放上单靠人工操作,其安全性也是偏低的,但现有的无人叉车在进行工作作业的过程中,无法保证无人叉车在进行高位双深货架货物取放场景中作业的安全性,影响工人和设备的安全保障。
技术实现思路
1、本发明的目的在于提供一种冷库用叉车剪刀叉前端传感器的布置方法,以解决上述背景技术中提出的无人叉车在进行工作作业的过程中,无法保证无人叉车在进行高位双深货架货物取放场景中作业的安全性,影响工人和设备的安全保障的问题。
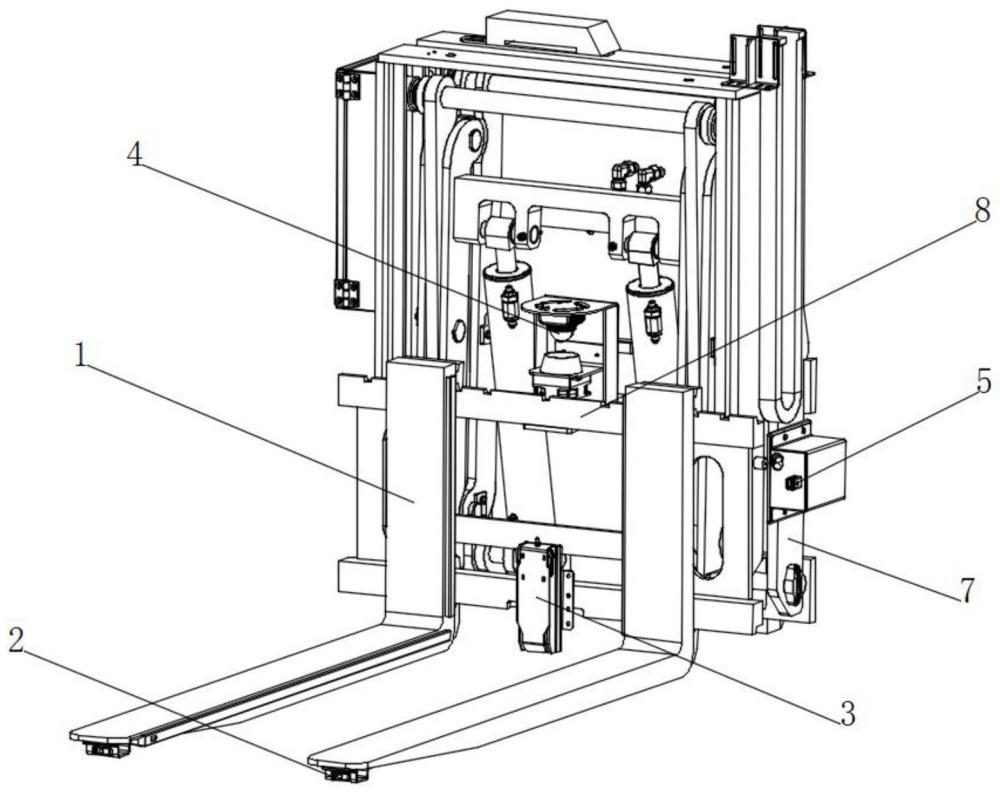
2、为实现上述目的,本发明提供如下技术方案,一种冷库用叉车剪刀叉前端传感器的布置方法,包括剪刀叉,所述剪刀叉的表面固定连接有安装板,所述安装板的内部安装有牙尖超声波,所述剪刀叉的表面固定连接有横板,所述横板的表面固定连接有固定板和第一接近开关,所述固定板的内部安装有激光雷达,所述横板的外表面设置有竖板,所述竖板的表面固定连接有安装盒和第二接近开关,所述安装盒的内部安装有拉线编码器,所述第二接近开关的表面固定连接有连接架。
3、优选的,所述剪刀叉的表面呈l型,所述剪刀叉的一端固定连接在安装板的表面,所述剪刀叉的另一端固定连接在横板的一端,所述牙尖超声波设置有两组,两组所述牙尖超声波固定连接在安装板的内表面。
4、优选的,所述横板呈板状设置有两组,一组所述横板的表面固定连接在第一接近开关的表面,另一组所述横板固定连接在固定板的表面,所述固定板的表面呈c型。
5、优选的,所述固定板的一侧固定连接在横板的表面,所述固定板的另一侧固定连接在激光雷达的表面,所述激光雷达的表面呈球面状。
6、优选的,所述竖板设置有两组,两组所述竖板的表面呈板状,一组所述竖板的表面固定连接在安装盒的表面,另一组所述竖板的表面固定连接在第一接近开关的表面。
7、优选的,所述安装盒的表面呈方形,所述安装盒的表面设置有安装孔,所述安装盒通过安装孔固定连接在竖板的表面,所述第二接近开关的两侧设置有通孔。
8、优选的,所述第二接近开关的一端通过通孔固定连接在竖板的表面,所述第二接近开关的另一端固定连接在连接架的表面,所述连接架的表面呈l状。
9、与现有技术相比,本发明的有益效果是:
10、1、通过对于冷库剪刀叉传感器布置方案,能让无人叉车较好地感知自身状态与外部环境信息,并基于传感器信息数据实现对整车更为安全的控制,通过在叉车的不同位置安装传感器,以检测叉车周边是否有障碍物,并检测叉车的各个结构是否作业完成,以保障叉车的作业的安全,同时也保证周边操作人员的安全。
技术特征:
1.一种冷库用叉车剪刀叉前端传感器的布置方法,包括剪刀叉(1),其特征在于:所述剪刀叉(1)的表面固定连接有安装板(9),所述安装板(9)的内部安装有牙尖超声波(2),所述剪刀叉(1)的表面固定连接有横板(8),所述横板(8)的表面固定连接有固定板(12)和第一接近开关(3),所述固定板(12)的内部安装有激光雷达(4),所述横板(8)的外表面设置有竖板(7),所述竖板(7)的表面固定连接有安装盒(10)和第二接近开关(6),所述安装盒(10)的内部安装有拉线编码器(5),所述第二接近开关(6)的表面固定连接有连接架(11)。
2.根据权利要求1所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:所述剪刀叉(1)的表面呈l型,所述剪刀叉(1)的一端固定连接在安装板(9)的表面,所述剪刀叉(1)的另一端固定连接在横板(8)的一端,所述牙尖超声波(2)设置有两组,两组所述牙尖超声波(2)固定连接在安装板(9)的内表面。
3.根据权利要求1所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:所述横板(8)呈板状设置有两组,一组所述横板(8)的表面固定连接在第一接近开关(3)的表面,另一组所述横板(8)固定连接在固定板(12)的表面,所述固定板(12)的表面呈c型。
4.根据权利要求1所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:所述固定板(12)的一侧固定连接在横板(8)的表面,所述固定板(12)的另一侧固定连接在激光雷达(4)的表面,所述激光雷达(4)的表面呈球面状。
5.根据权利要求1所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:所述竖板(7)设置有两组,两组所述竖板(7)的表面呈板状,一组所述竖板(7)的表面固定连接在安装盒(10)的表面,另一组所述竖板(7)的表面固定连接在第一接近开关(3)的表面。
6.根据权利要求1所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:所述安装盒(10)的表面呈方形,所述安装盒(10)的表面设置有安装孔,所述安装盒(10)通过安装孔固定连接在竖板(7)的表面,所述第二接近开关(6)的两侧设置有通孔。
7.根据权利要求6所述的一种冷库用叉车剪刀叉前端传感器的布置方法,其特征在于:述第二接近开关(6)的一端通过通孔固定连接在竖板(7)的表面,所述第二接近开关(6)的另一端固定连接在连接架(11)的表面,所述连接架(11)的表面呈l状。
技术总结
本发明涉及叉车技术领域,具体为一种冷库用叉车剪刀叉前端传感器的布置方法,包括剪刀叉,所述剪刀叉的表面固定连接有安装板,所述安装板的内部安装有牙尖超声波,所述剪刀叉的表面固定连接有横板,所述横板的表面固定连接有固定板和第一接近开关,所述固定板的内部安装有激光雷达,所述横板的外表面设置有竖板,所述竖板的表面固定连接有安装盒和第二接近开关,所述安装盒的内部安装有拉线编码器,所述第二接近开关的表面固定连接有连接架。本发明通过对于冷库剪刀叉传感器布置方案,能让无人叉车较好地感知自身状态与外部环境信息,并基于传感器信息数据实现对整车更为安全的控制。
技术研发人员:陈文成,吕朝顺,刘志强
受保护的技术使用者:劢微机器人科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!