一种根据识别框调整角度投放方法
本发明涉及机器人,具体涉及一种根据识别框调整角度投放方法。
背景技术:
1、随着机器人技术发展,机器人已广泛应用于各种各样的领域,比如搬运等,现有的搬运机器人,一般只能将东西夹取之后放入存储框内然后到达目的地之后将搬运的东西拿出即可,其并不能实现搬运到目的地之后将物品投入到指定框内,而这种应用在投放机器人中具有广泛的需求。
2、如中国专利申请号为202211564389.3,公告日为2022 .12 .07的专利文献中就公开了一种物料转运储存多功能机器人,包括车体,车体包括用于驱动车体移动的移动机构、升降装置、储存机构、夹紧装置和拖拉机构;升降装置安装在移动机构上,储存机构设置在升降装置内;夹紧装置设置在升降装置上;升降装置可分别驱动储存机构和夹紧装置升降;拖拉机构设置在移动机构的一侧;以上方法能够夹持 yaw轴偏移的箱型物料,使得物料不易掉落或损坏。
3、该方法中,其只能对箱型物料进行夹持之后放入到储存机构中进行翻面以及升降,其并不能将储存机构中的物料夹取出来按照指定角度投放到投放框内。
技术实现思路
1、本发明提供一种根据识别框调整角度投放方法,能按照投放框的角度调整投放的角度,投放准确性高且操作方便。
2、为达到上述目的,一种根据识别框调整角度投放方法,通过角度调整结构将放置在储存机构上的物料投放到物料框内,其特征在于:所述角度调整结构包括控制机构、拾取机构和视觉机构,所述控制机构设置在存储机构的两侧,在储存机构前端的控制机构上设有拾取机构,所述视觉机构设置在储存机构的后端,所述拾取机构包括吸盘组件、第一电机和翻管,所述第一电机通过第一电机安装架设置在控制结构上,在第一电机的驱动轴上设有第一主动齿轮,在第一电机安装架上设有与第一主动齿轮啮合的第一从动齿轮,在第一从动齿轮上设有翻管,在翻管上设有第二电机,在第二电机的驱动轴上设有吸盘组件,所述吸盘组件抓取物料设置,所述第一电机驱动翻管向存储机构的方向摆动;
3、控制机构包括升降结构和伸出结构,所述升降结构设置于储存机构的两侧,所述伸出结构安装于升降结构上,在伸出结构上设有拾取结构;所述升降结构驱动伸出结构升降设置,所述伸出结构驱动拾取机构移动设置。
4、物料框的四个角落上分别设置有三个第一识别框和一个第二识别框,三个第一识别框和一个第二识别框形成一个框体结构。
5、投放方法包括以下步骤:
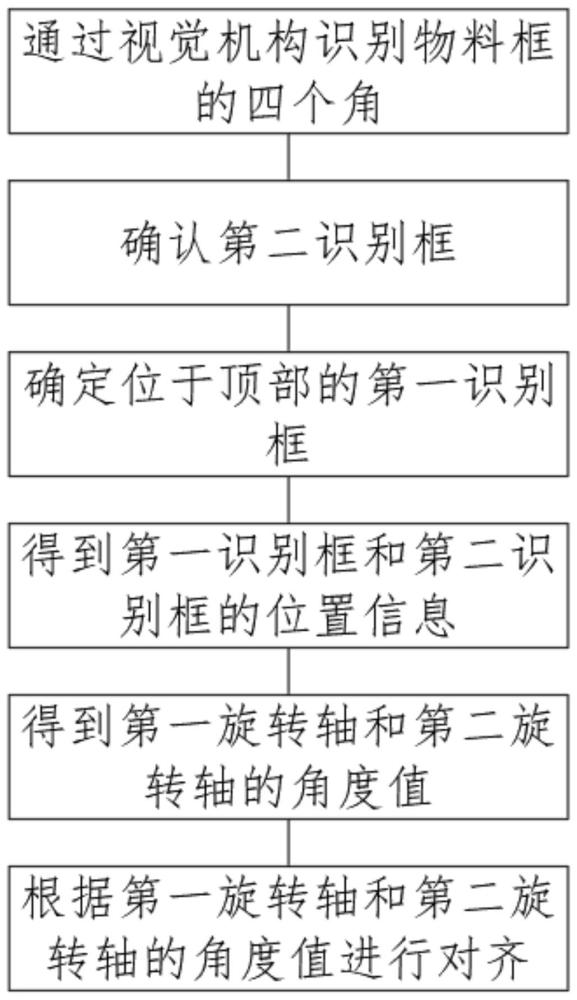
6、s1通过视觉机构识别物料框的四个角。
7、s2确认第二识别框是否只有1个,并确定出第二识别框里最大的框边,确定为第二识别框。
8、s3通过第二识别框与顶部第一识别框之间的距离确定位于顶部的第一识别框。
9、s4然后根据预设两个第一识别框之间的距离确定其他两个第一识别框的位置,最终得到第一识别框和第二识别框的位置信息。
10、s5根据三个第一识别框和一个第二识别框计算斜率,得到第一旋转轴和第二旋转轴的角度值。
11、s6第一电机根据第一旋转轴的角度值控制翻管进行翻转,第二电机根据第二旋转轴的角度值控制吸盘组件进行旋转,在对齐之后控制吸盘组件放松吸附从而实现投放。
12、以上设置,通过升降结构和伸出结构驱动拾取结构移动至物料的位置上,由此通过吸盘组件将物料吸取,进而通过第一电机驱动第一主动齿轮转动,进而使得第一从动齿轮转动,由此使得翻管带动吸盘组件向储存机构的方向摆动,从而使得吸盘组件能够对物料进行吸取,由此即可将物料转移出存储机构,从而可以进行搬运,在物料搬运的过程中,通过视觉机构对物料框进行拍摄并定位,使得物料能够准确的存放到物料框内,通过识别物料框四个角落位置的识别框,并根据识别框的斜率计算出对应需要旋转的角度值,然后通过控制翻管和吸盘组件转动到与物料框对应位置从而实现投放位置的识别,使得投放的准确性高。
13、进一步的,所述储存机构包括储存机架、第一储存调节部件、第二储存调节部件和储存升降模块,在储存机架上设有储存升降模块,在升降模块上设有调节安装架,第一储存调节部件设置在调节安装架的一端且沿调节安装架的长度方向滑动,第二储存调节部件设置在调节安装架的另一端且沿调节安装架的长度方向滑动,在第一储存调节部件和第二储存调节部件之间形成用于存放物料的存放区间,物料通过第一储存调节部件和第二储存调节部件带动提升或下降。
14、以上设置,通过第一储存调节部件和第二储存调节部件的驱动下带动物料向上移动从而使得物料转移出存放区间,从而方便吸盘组件将物料进行吸取。
15、进一步的,所述吸盘组件包括吸盘固定板、吸盘安装板和吸盘,所述第二电机通过吸盘固定板安装在翻管上,在第二电机的驱动轴上设有吸盘安装板,所述吸盘设置在吸盘安装板上。
16、以上设置,通过第二电机驱动吸盘安装板旋转,由此使得可以调整物料的第二旋转角度。
17、进一步的,所述第一储存调节部件和第二储存调节部件分别通过储存调节移动模块连接在调节安装架上,且第一储存调节部件和第二储存调节部件的移动方向相反。
18、由此设置,使得第一储存调节部件和第二储存调节部件能够沿调节安装架的长度方向移动,且由于第一储存调节部件和第二储存调节部件的移动方向相反,从而即可通过第一储存调节部件和第二储存调节部件相互靠近从而将物料夹紧且相互远离即可将物料松开,结构简单且有效。
19、进一步的,所述视觉机构包括摄像头、摄像头转动舵机和摄像头升降模块,所述摄像头升降模块设置在底座的后端上,在摄像头升降模块上设有摄像头转动舵机,所述摄像头设置在摄像头转动舵机的驱动轴上。
20、以上设置,通过摄像头转动舵机的设置,使得摄像头能够进行水平转动,由此实现多方位的拍摄。
21、进一步的,摄像头升降模块包括摄像头升降齿条、摄像头升降齿轮、摄像头升降电机和摄像头安装架,所述摄像头安装架设置在底座上,在摄像头安装架上设有摄像头升降电机,在摄像头升降电机的驱动轴上设有摄像头升降齿轮,在摄像头安装架上设有摄像头升降滑块,所述摄像头升降齿条滑动的设置在摄像头升降滑块上且摄像头升降齿条与摄像头升降齿轮啮合,在摄像头升降齿条上设有第一摄像头转动舵机。
22、以上设置,通过摄像头升降电机驱动摄像头升降齿轮转动,进而带动摄像头升降齿条上下移动,从而驱动摄像头进行升降,从而使得摄像头的拍摄范围更广,使摄像头观察更灵敏。
23、进一步的,在摄像头转动舵机的驱动轴上还设有摄像头转动架,所述摄像头转动架上设有第二摄像头转动舵机,所述摄像头设置在第二摄像头转动舵机上,且第二摄像头转动舵机驱动摄像头上下摆动设置。
24、以上设置,通过第二摄像头转动舵机,使得摄像头能够进行垂直角度的调节,从而便于摄像头进行全方位的拍摄。
25、进一步的,所述第一储存调节部件包括第一储存调节电机和第一储存调节辊筒,所述第一储存调节电机设置在储存调节移动模块上,在第一储存调节电机的驱动轴上设有第一储存调节辊筒;所述第二储存调节部件包括第二储存调节电机和第二储存调节辊筒,所述第二储存调节电机设置在储存调节移动模块上,在第二储存调节电机的驱动轴上设有第二储存调节辊筒上,在第一储存调节辊筒和第二储存调节辊筒之间形成存放区间。
26、由此设置,通过第一储存调节电机驱动第一储存调节辊筒转动、第二储存调节电机驱动第二储存调节辊筒转动,当第一储存调节辊筒和第二储存调节辊筒相对向存放区间内转动时,即可带动物料向下移动储存在存放区间内;当第一储存调节辊筒和第二储存调节辊筒相对向存放区间外转动时,即可带动物料向上移动并转移出存放区间外,由此方便拾取机构将物料拾取并转移。
27、进一步的,步骤s5具体包括:
28、s51第一旋转轴的计算方式。
29、s511计算位于物料框左上角落的识别框与位于物料框右上角落的识别框之间的距离d、位于物料框左下角落的识别框与位于物料框右下角落的识别框之间的距离a、位于物料框右上角落的识别框与位于物料框右下角落的识别框之间的距离b以及位于物料框左上角落的识别框与位于物料框左下角落的识别框之间的距离c。
30、s512根据步骤s511算出的距离计算物料框每个夹角的弧度值;
31、距离d与距离c的夹角弧度值计算公式为arcsin(c/d)。
32、距离b与距离d的夹角弧度值计算公式为arcsin(b/d)。
33、距离c与距离a的夹角弧度值计算公式为arcsin(c/a)。
34、距离b与距离a的夹角弧度值计算公式为arcsin(b/a)。
35、s513计算出步骤s512中的弧度值的平均值。
36、s514通过弧度转角度公式将弧度平均值转换为角度平均值。
37、所述弧度转角度公式为:rad*180/π,其中rad为弧度 ;180为角度;π为圆周率。
38、s515计算第一旋转轴的角度值:90-角度平均值-第一旋转轴当前的角度。
39、s52第二旋转轴的计算方式:
40、s521通过斜率计算公式k=δy/δx,计算出位于物料框左上角落的识别框与位于物料框右上角落的识别框之间直线的斜率以及位于物料框左下角落的识别框之间的直线α与位于物料框右下角落的识别框之间直线β的斜率。
41、s522分别通过反正切函数(arctan)计算出的α和β的弧度值;
42、s523计算α和β的弧度平均值。
43、s524通过弧度转角度计算公式将步骤s523计算出的弧度平均值转化为角度值,获得第二旋转轴的角度值。
44、由此设置,通过计算物料框四个角落的识别框之间的距离,从而能够更好对第一旋转轴和第二旋转轴的角度值进行计算。
- 还没有人留言评论。精彩留言会获得点赞!