一种智能垃圾回收设备的制作方法
本发明涉及垃圾回收设备领域,更具体地说,涉及一种智能垃圾回收设备。
背景技术:
1、垃圾是失去使用价值、无法利用的废弃物品,是物质循环的重要环节,是不被需要或无用的固体、流体物质,在人口密集的大城市,垃圾处理是一个令人头痛的问题,常见的做法是收集后送往堆填区进行填埋处理,或是用焚化炉焚化,但两者均会制造环境保护的问题,而终止过度消费可进一步减轻堆填区饱和程度,堆填区中的垃圾处理不但会污染地下水和发出臭味,而且很多城市可供堆填的面积已越来越少,焚化则无可避免会产生有毒气体,危害生物体,多数的城市都在研究减少垃圾产生的方法和鼓励资源回收,资源回收工作需要使用到智能垃圾回收设备。
2、现有智能垃圾回收设备主要由给料机、传送带、捡拾机械手、垃圾桶等构成,其中捡拾机械手安装在传送带的一侧,垃圾桶放在捡拾机械手的一侧,给料机安装在传送带的一端,工作时,首先给料机将垃圾铺放在传送带上,然后捡拾机械手将目标垃圾捡拾至垃圾桶内,接着人们来回的对垃圾桶进行检查,以防止垃圾桶满溢,之后对装满垃圾的垃圾桶进行更换,如此实现对垃圾进行分类回收的目的,但是人们来回对垃圾桶进行检查时需要来回走动,费时费力,而且需要人为对垃圾桶进行更换,更加的费时费力,同时存在垃圾桶更换不及时,导致垃圾过满而坠落地面,因此亟需设计一种智能垃圾回收设备。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的现有智能垃圾回收设备主要由给料机、传送带、捡拾机械手、垃圾桶等构成,其中捡拾机械手安装在传送带的一侧,垃圾桶放在捡拾机械手的一侧,给料机安装在传送带的一端,工作时,首先给料机将垃圾铺放在传送带上,然后捡拾机械手将目标垃圾捡拾至垃圾桶内,接着人们来回的对垃圾桶进行检查,以防止垃圾桶满溢,之后对装满垃圾的垃圾桶进行更换,如此实现对垃圾进行分类回收的目的,但是人们来回对垃圾桶进行检查时需要来回走动,费时费力,而且需要人为对垃圾桶进行更换,更加的费时费力,同时存在垃圾桶更换不及时,导致垃圾过满而坠落地面的问题,本发明的目的在于提供一种智能垃圾回收设备,它可以很好的解决背景技术中提出的问题。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案。
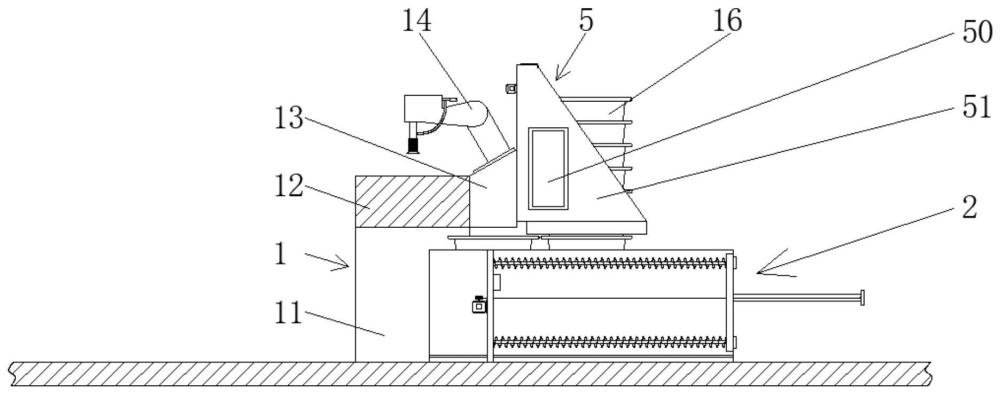
5、一种智能垃圾回收设备,包括垃圾回收机构,所述垃圾回收机构包括支撑腿板,支撑腿板的顶端上固定安装有传送机构,传送机构的右侧面上固定安装有斜面安装台,斜面安装台的顶面上固定安装有捡拾机械手,斜面安装台的顶面上开设有垃圾落料孔,垃圾落料孔的底端为开口状,垃圾落料孔正下方的地面上放置有垃圾收集件,垃圾收集件包括垃圾桶体,垃圾桶体的顶部连接有扩径圈,斜面安装台的底面上固定安装有满溢感应器,满溢感应器的另一端指向垃圾收集件的内部,斜面安装台下方的地面上设有自动更换机构,所述自动更换机构包括导向滑轨,导向滑轨固定连接在斜面安装台下方的地面上,导向滑轨的数量为两个,斜面安装台下方的地面上设有控压机构,所述控压机构包括开口块,开口块固定连接在斜面安装台下方的地面上,传送机构下方的地面上设有偏移机构,所述偏移机构包括偏移嵌装板,偏移嵌装板固定嵌装在传送机构下方的地面内,偏移嵌装板的顶面与地面齐平,斜面安装台的右侧面上设有提升机构,所述提升机构包括两个直角梯形板,两个直角梯形板均固定连接在斜面安装台的右侧面上,直角梯形板的底端设有分离机构,所述分离机构包括分离板,两个直角梯形板的底端均固定连接在分离板的顶面上且分别位于其前后两端,两个直角梯形板之间设有托举机构,所述托举机构包括托举条,托举条滑动插接在两个直角梯形板之间。
6、优选的,所述自动更换机构还包括两个夹持扁管,两个夹持扁管分别固定连接在两个导向滑轨的顶面上,两个夹持扁管分别位于垃圾收集件的前后两侧,两个夹持扁管相互接近的两个面上均开设有条形长孔,条形长孔与夹持扁管内腔连通,条形长孔的内部固定连接有橡胶弹片,夹持扁管的右端固定连接有联动长条,联动长条与两个夹持扁管均固定连接,联动长条的底面固定连接在导向滑轨的顶面上,联动长条的内部开设有动力气腔,动力气腔内腔的顶面上固定插接有位于其左端的吸气单向阀,动力气腔与夹持扁管连通,动力气腔内腔的左侧面通过压缩弹簧传动连接有加压活塞,加压活塞滑动插接在动力气腔的内部,加压活塞的右侧面上固定连接有加压滑杆,加压滑杆的右端延伸至联动长条的外部并固定连接有受力长条,联动长条的表面上固定连接有位移滑条,位移滑条上滑动插接有固定滑杆,固定滑杆的右端固定连接有端部挡盘,端部挡盘与位移滑条接触连接,固定滑杆的左端固定连接有固定竖板,固定竖板的底端固定连接在地面上,固定滑杆的外部活动套接有撑开弹簧,固定竖板通过撑开弹簧与位移滑条传动连接,固定竖板的右侧面上固定安装有无线测距仪,固定竖板的左侧面上固定安装有更换伺服马达,更换伺服马达上输出轴的顶端固定连接有更换线轮,更换线轮的外部缠绕有刚换引线,刚换引线的另一端贯穿固定竖板、位移滑条并固定连接在受力长条的左侧面上。
7、优选的,所述控压机构还包括开口斜面,开口斜面设在开口块的右上角处,所述控压机构还包括控压锥槽,控压锥槽开设在动力气腔内腔的底面上并位于其左端,控压锥槽内腔的底面上开设有柱形孔,柱形孔内腔的底面上开设有柱形腔,柱形腔的内部滑动插接有阻尼空心活塞,阻尼空心活塞的顶面上固定连通有控压圆筒,控压圆筒的顶端滑动插接在柱形孔的内部,控压圆筒上开设有位于其顶部的控压通孔,控压圆筒上设有位于控压通孔上方的密封圈,阻尼空心活塞的底面上固定连通有控压扁管,控压扁管的底端延伸至联动长条的外部,控压扁管的表面上固定连接有控制延伸柱,所述控压机构还包括闭气块,闭气块固定连接在地面上且位于开口块的右侧,闭气块的左下角处设有闭气斜面,闭气斜面和开口斜面均与控制延伸柱相适配。
8、优选的,所述偏移机构还包括偏移凹槽,偏移凹槽开设在偏移嵌装板的顶面上,偏移凹槽的内壁上安装有两个偏移大轮,两个偏移大轮分别位于偏移凹槽的左右两端,两个偏移大轮通过偏移窜动带传动连接,偏移凹槽的内壁上安装有多个位于偏移窜动带内侧的偏移托举轮,偏移托举轮与偏移窜动带内腔的顶面接触连接。
9、优选的,所述提升机构还包括智能控制器,智能控制器固定连接在一个直角梯形板的表面上,所述提升机构还包括安装竖板,安装竖板固定连接在两个直角梯形板之间,安装竖板的左侧面上固定安装有提升伺服马达,提升伺服马达上的输出轴贯穿安装竖板并固定套接有提升线轮,提升线轮的外部缠绕有提升引线,所述提升机构还包括上顶板,上顶板固定连接在两个直角梯形板之间,上顶板的底面上固定连接有触压感应器和导向竖杆,导向竖杆的底端固定连接在分离板的顶面上,托举条活动套接在导向竖杆的外部,托举条与触压感应器相适配,所述提升机构还包括两个导线轮,两个导线轮均固定连接在两个直角梯形板之间且分别位于上顶板的左右两侧,提升引线的端部绕过两个导线轮。
10、优选的,所述分离机构还包括贯穿孔,贯穿孔开设在分离板上,贯穿孔的内部活动插接有堆叠在一起的垃圾收集件,所述分离机构还包括缓冲腔,缓冲腔开设在分离板的内部,缓冲腔的内壁通过缓冲弹簧传动连接有缓冲活塞,缓冲活塞滑动插接在缓冲腔的内部,缓冲活塞的右侧面固定连接有直角三角板,直角三角板的右端延伸至贯穿孔的内部且与扩径圈相适配,缓冲活塞的左侧面上固定连接有塑形滑杆,塑形滑杆的左端从分离板的左侧面延伸出来。
11、优选的,所述托举机构还包括托举长腔,托举长腔开设在托举条的内部,托举长腔内腔的右侧面上开设有翻转开口,翻转开口的右端为开口状,托举长腔的内部设有两个翻转轴,两个翻转轴分别位于托举长腔的两端,翻转轴的上下两端分别活动套接在托举长腔内腔的上下两面上,翻转轴的外部固定套接有翻转柱,翻转柱的右侧面上固定连接有翻转长臂,翻转长臂的右端穿过翻转开口并呈张开状态,翻转长臂的数量为两个,两个翻转长臂分别位于垃圾收集件的前后两侧,翻转柱上开设有位于其顶部的上绕线环槽,上绕线环槽的内部缠绕有上动力线,上动力线的另一端固定连接有逆反弹簧,逆反弹簧的另一端固定连接有逆反立板,逆反立板固定连接在托举长腔内腔的左侧面上,翻转柱的外部开设有位于其底端的下绕线环槽,下绕线环槽的内部缠绕有下动力线,下动力线上缠绕有压线轮,压线轮固定连接在托举长腔内腔的底面上,提升引线的底端延伸至托举长腔的内部并固定连接在下动力线上,上动力线在上绕线环槽内部的缠绕方向与下动力线在下绕线环槽内部的缠绕方向相反。
12、3.有益效果
13、相比于现有技术,本发明的优点在于:
14、1、通过垃圾回收机构能够将目标类别的垃圾捡拾出来并将其存放在垃圾收集件中,实现对垃圾进行分类回收的目的,同时垃圾回收机构能够对垃圾收集件内部垃圾的量进行实时监测,以便该智能垃圾回收设备能够实时获知垃圾收集件内部的垃圾量,不需要人为巡查,省时省力,通过在垃圾收集件的右侧放置另一个垃圾收集件,方便对垃圾收集件进行更换,以便将装满垃圾的垃圾收集件替换下来,通过自动更换机构能够将垃圾收集件及其右侧的垃圾收集件夹持住并推着他们向左移动,如此实现自动更换垃圾收集件的目的,不需要人为对垃圾收集件进行更换,更加的省时省力,而且能够达到及时更换垃圾收集件的效果,避免垃圾过满而坠落地面的问题,提高了该智能垃圾回收设备的实用性。
15、2、通过控压机构,使自动更换机构推动着垃圾收集件向左移动至极点位置时能够将垃圾收集件放开,以便自动更换机构复位过程中不会使垃圾收集件移动,确保垃圾回收机构捡拾出来的目标垃圾能够准确落在替换上的垃圾收集件中,通过偏移机构,使垃圾收集件向左移动的过程中不会相互碰撞,避免垃圾收集件被撞倒而导致垃圾散落地面的问题,通过提升机构能够驱动托举机构夹持在垃圾收集件的外部并带着堆叠在一起的垃圾收集件同步向上移动,通过分离机构能够将垃圾收集件堆叠所形成柱体最低端的垃圾收集件取下来并将其摆放在处于工作状态垃圾收集件的右侧,实现自动摆放垃圾收集件的目的,使用起来更加的省时省力,提高了该智能垃圾回收设备的实用性。
- 还没有人留言评论。精彩留言会获得点赞!