装卸机器人自张紧装置的制作方法
本发明涉及装卸设备,具体涉及装卸机器人自张紧装置。
背景技术:
1、货物的装卸是仓储物流中的一个重要环节,决定了物流的效率。传统方式中,货物的搬运由人工完成,但是人工搬运成本高、效率低。为提高工作效率,降低货物装卸成本,当前本领域技术已经逐步向装卸机器人的方向发展,但在实现装卸机器人进行货物的装卸过程中,需要对机械臂上较长的输送带进行相关输送的干预,比如因机械臂过于倾斜需要考虑防止输送带上输送的货物自然滑落等问题,以确保自动装卸货物过程的安全和货物输送的稳定性。而较长的机械臂就需要一款能够实现宽面夹持的装置,本申请人通过与广西中烟工业有限责任公司开展相关技术研发课题,结合各方研发优势以解决上述技术问题,并加工有样机“自动装卸车机器人”。
技术实现思路
1、针对以上不足,本发明提供一种针对自动装卸过程能确保自动装卸货物过程的安全和提高货物输送稳定性装卸机器人自张紧装置。
2、为达到上述目的,本发明采用如下技术方案:
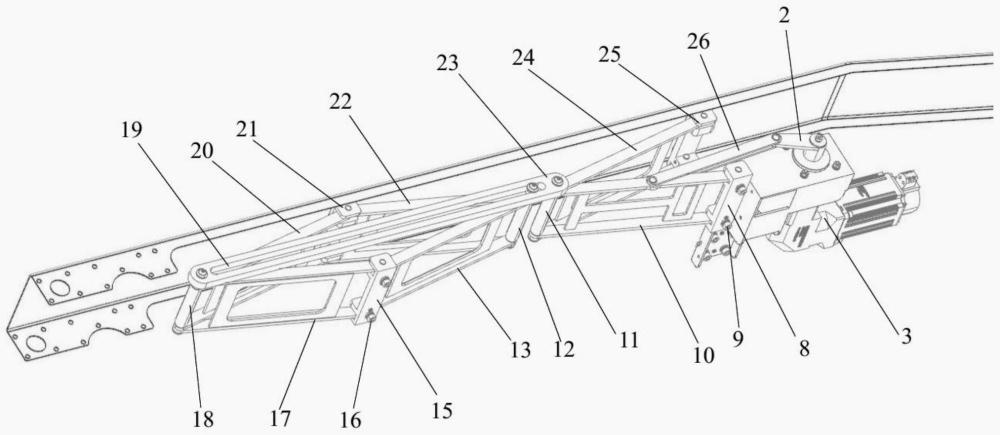
3、装卸机器人自张紧装置,包括动力源组件、伸缩组件、挤压板和固定架;所述伸缩组件由若干伸缩板组成,两个所述伸缩板通过铰接组成v形结构单元,所述挤压板和所述固定架分别设置在所述v形结构单元的左右两侧;在所述动力源组件对所述伸缩组件施加前后方向的力矩而促使所述v形结构单元呈左右方向涨开或收缩,同时通过将所述固定架作为固定侧,而实现所述挤压板沿左右方向涨开或收缩;所述动力源组件采用电动机作为动力源;所述动力源组件包括摇杆和拉杆;所述摇杆的一端与动力源组件的动力输出轴连接,其另一端通过转动轴与所述拉杆的一端连接;所述拉杆的另一端通过转动轴与所述v形结构单元的伸缩板连接。
4、可选的,所述伸缩组件包括第一v形结构单元、第二v形结构单元、第三v形结构单元和导程板;所述导程板上设置有导程限位结构,所述第一v形结构单元的铰接端采用第一铰接杆,所述第一铰接杆与所述导程板的后端连接;所述第一v形结构单元的另一端的左右侧分别采用铰接结构与所述挤压板和所述固定架连接;
5、所述第二v形结构单元的铰接端采用第二铰接杆,所述第二铰接杆设置在所述导程限位结构上且可在所述导程限位结构上沿前后方位移动;所述第二v形结构单元的另一端的左右侧分别采用铰接结构与所述挤压板和所述固定架连接;所述第三v形结构单元的铰接端采用第三铰接杆,所述第三铰接杆与所述导程板的前端连接;所述第三v形结构单元的另一端的左右侧分别采用铰接结构与所述挤压板和所述固定架连接。
6、可选的,所述动力源组件设置在所述伸缩组件的后侧;所述拉杆的另一端通过转动轴与所述第一v形结构单元的伸缩板连接。
7、可选的,所述导程限位结构为导程长槽,所述导程长槽沿所述导程板的前后方位设置;所述第二铰接杆被限定在所述导程长槽内且可沿所述导程长槽位移。可选的,所述挤压板和所述固定架分别通过铰接板与所述v形结构单元连接;所述铰接板包括矩形板体,所述矩形板体的上下侧各设置有u形槽;所述v形结构单元的伸缩板的上下两端则通过转动轴分别与所述u形槽可动连接。可选的,所述固定架整体呈z形结构,包括下固定部和上连接部;所述下固定部设置有固定孔,用于连接到车体上;所述上连接部设置有连接孔,用于与所述v形结构单元连接。
8、可选的,所述第二v形结构单元的伸缩板与所述第三v形结构单元的伸缩板组成平行四边形结构。
9、与现有技术相比,本发明的有益效果是:
10、1、本发明伸缩组件通过采用多个v形结构单元实现伸缩功能,你能够实现一个伸缩组件就能满足长度在2~3米以上的挤压板的稳定夹持作业,且夹持效果好、控制灵活均匀,尤其满足装卸货物时其长距离传送过程中所需要的持续性均衡夹持干预且不影响货物能够持续缓慢顺畅移动的需求。
11、2、在进行装货时,需要进行码垛,通过本装置可以作用于货箱相对输送带左右位置的调节,即可以实现货箱是沿左或右成排码垛;因为,比如装卸机器人的前部输送装置的宽度设置得相对比较宽,因此,在需要进行码垛时,可以通过设置在左侧和右侧的本装置对货箱的位置进行调节,进而对货箱沿左侧或右侧推移,实现标准码垛,使用效果好。
技术特征:
1.装卸机器人自张紧装置,其特征在于:包括动力源组件、伸缩组件、挤压板和固定架;所述伸缩组件由若干伸缩板组成,两个所述伸缩板通过铰接组成v形结构单元,所述挤压板和所述固定架分别设置在所述v形结构单元的左右两侧;在所述动力源组件对所述伸缩组件施加前后方向的力矩而促使所述v形结构单元呈左右方向涨开或收缩,同时通过将所述固定架作为固定侧,而实现所述挤压板沿左右方向涨开或收缩;所述动力源组件采用电动机作为动力源;所述动力源组件包括摇杆和拉杆;所述摇杆的一端与动力源组件的动力输出轴连接,其另一端通过转动轴与所述拉杆的一端连接;所述拉杆的另一端通过转动轴与所述v形结构单元的伸缩板连接。
2.根据权利要求1所述的装卸机器人自张紧装置,其特征在于:所述伸缩组件包括第一v形结构单元、第二v形结构单元、第三v形结构单元和导程板;所述导程板上设置有导程限位结构,所述第一v形结构单元的铰接端采用第一铰接杆,所述第一铰接杆与所述导程板的后端连接;所述第一v形结构单元的另一端的左右侧分别采用铰接结构与所述挤压板和所述固定架连接;
3.根据权利要求2所述的装卸机器人自张紧装置,其特征在于:所述动力源组件设置在所述伸缩组件的后侧;所述拉杆的另一端通过转动轴与所述第一v形结构单元的伸缩板连接。
4.根据权利要求2所述的装卸机器人自张紧装置,其特征在于:所述导程限位结构为导程长槽,所述导程长槽沿所述导程板的前后方位设置;所述第二铰接杆被限定在所述导程长槽内且可沿所述导程长槽位移。
5.根据权利要求1所述的装卸机器人自张紧装置,其特征在于:所述挤压板和所述固定架分别通过铰接板与所述v形结构单元连接;所述铰接板包括矩形板体,所述矩形板体的上下侧各设置有u形槽;所述v形结构单元的伸缩板的上下两端则通过转动轴分别与所述u形槽可动连接。
6.根据权利要求1所述的装卸机器人自张紧装置,其特征在于:所述固定架整体呈z形结构,包括下固定部和上连接部;所述下固定部设置有固定孔,用于连接到车体上;所述上连接部设置有连接孔,用于与所述v形结构单元连接。
7.根据权利要求2所述的装卸机器人自张紧装置,其特征在于:所述第二v形结构单元的伸缩板与所述第三v形结构单元的伸缩板组成平行四边形结构。
技术总结
本发明涉及装卸设备技术领域,具体涉及装卸机器人自张紧装置,包括动力源组件、伸缩组件、挤压板和固定架;所述伸缩组件由若干伸缩板组成,两个所述伸缩板通过铰接组成V形结构单元,所述挤压板和所述固定架分别设置在所述V形结构单元的左右两侧;在所述动力源组件对所述伸缩组件施加前后方向的力矩而促使所述V形结构单元呈左右方向涨开或收缩,同时通过将所述固定架作为固定侧,而实现所述挤压板沿左右方向涨开或收缩;所述动力源组件包括摇杆和拉杆。本发明能够实现稳定夹持作业,且夹持效果好、控制灵活均匀,尤其满足装卸货物时其长距离传送过程中所需要的持续性均衡夹持干预且不影响货物能够持续缓慢顺畅移动的需求。
技术研发人员:陈少军,张伟,郭跃平,陈亮,高文,胡万俊,李航,李秀博,王成军,金力,杜显进
受保护的技术使用者:合肥哈工同创智能科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!