一种折臂机构控制系统与方法与流程
本申请涉及机械设备,特别是涉及一种折臂机构控制系统与方法。
背景技术:
1、在曲臂高空作业平台上,主臂和折臂使用连接体进行连接。为保证曲臂高空作业平台的稳定性和操作人员安全,需保持连接体垂直于转台,故使用双油缸(连接体调平油缸和折臂变幅油缸)在折臂运动过程中对连接体进行联动调平。
2、但在实际应用过程中由于平衡阀的内泄或油缸内空气的未完全排出,会导致连接体的倾斜,需要定期对机器进行维护与检查,而肉眼无法轻易检测出其角度。若连接体倾斜到一定角度,未调整便进入工作状态,将存在较大安全隐患。
3、如何检测并调节连接体的倾斜角度,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、为解决上述技术问题,本发明的目的为提供一种能方便地检测并调节连接体的倾斜角度的折臂机构控制系统与方法。
2、本发明提供的技术方案如下:
3、一种折臂机构控制系统,所述折臂机构包括安装于基座上的折臂、主臂,以及连接主臂与折臂的连接体,所述控制系统包括连接体调平油缸、连接体角度检测装置、油缸控制装置,所述连接体调平油缸安装于折臂上,活塞杆连接连接体,所述连接体角度检测装置用于检测连接体相对于基座的角度,所述油缸控制装置连接连接体调平油缸,用于根据连接体角度检测装置检测到的连接体相对于基座的角度,控制连接体调平油缸伸缩来调节连接体角度。
4、优选地,所述连接体角度检测装置包括连接体角度传感器、基座水平传感器,所述连接体角度传感器用于检测连接体的绝对角度,所述基座水平传感器用于检测基座相对于水平面的角度,以通过连接体角度传感器、基座水平传感器所测得的角度值得到连接体相对于基座的角度。
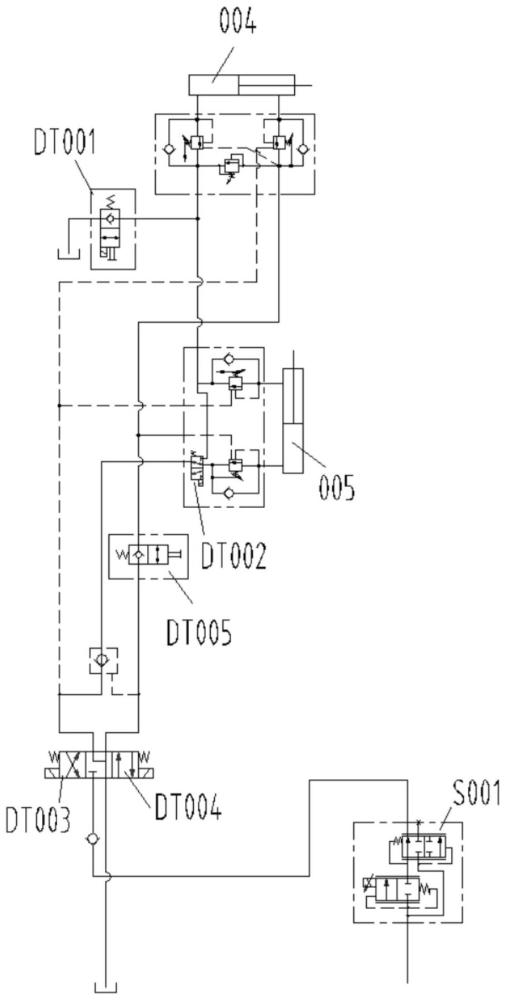
5、优选地,所述油缸控制装置包括控制器、第一电磁开关阀、第二电磁开关阀、第三电磁开关阀、第四电磁开关阀,所述第一电磁开关阀位于连接体调平油缸无杆腔与油箱之间,所述第二电磁开关阀位于连接体调平油缸无杆腔与压力油入口之间,所述第三电磁开关阀、第四电磁开关阀并联位于第二电磁开关阀与压力油入口之间,控制器连接连接体角度检测装置、第一电磁开关阀、第二电磁开关阀、第三电磁开关阀、第四电磁开关阀,当连接体远离折臂倾斜需要调平时,控制器输出让第一电磁开关阀、第三电磁开关阀得电,将连接体调平油缸无杆腔液压油从第一电磁开关阀释放回油箱,连接体调平油缸活塞杆缩回,连接体朝折臂旋转;当连接体朝折臂倾斜需要调平时,控制器输出让第二电磁开关阀、第四电磁开关阀得电,液压油进入连接体调平油缸无杆腔,连接体调平油缸活塞杆伸出,连接体远离折臂旋转。
6、优选地,还包括折臂变幅油缸,所述折臂变幅油缸安装于基座上,活塞杆连接折臂;所述折臂变幅油缸的无杆腔连接第二电磁开关阀,在第二电磁开关阀失电状态连接第二电磁开关阀与第三电磁开关阀或第四电磁开关阀之间的管路,有杆腔连接第二电磁开关阀与连接体调平油缸无杆腔之间的管路。
7、优选地,所述第三电磁开关阀或第四电磁开关阀与连接体调平油缸有杆腔之间还设有能用于手动操作的第五开关阀,所述第一电磁开关阀具手动操作功能用以手动调节连接体角度。
8、一种折臂机构控制方法,使用如上所述的折臂机构控制系统,所述控制方法包括:
9、判断步骤:控制器判断连接体是否倾斜需要调平;
10、调平操作步骤:若需要调平,当连接体远离折臂倾斜时,控制器输出让第一电磁开关阀、第三电磁开关阀得电,将连接体调平油缸无杆腔液压油从第一电磁开关阀释放回油箱,连接体调平油缸活塞杆缩回,连接体朝折臂旋转;当连接体朝折臂倾斜时,控制器输出让第二电磁开关阀、第四电磁开关阀得电,液压油进入连接体调平油缸无杆腔,连接体调平油缸活塞杆伸出,连接体远离折臂旋转。
11、优选地,所述判断步骤中,控制器判断连接体是否倾斜需要调平包括:连接体相对于基座的角度是否在第一设定角度范围内,若是,则不需要调平;若否,则需要调平。
12、优选地,所述控制器判断步骤后调平操作步骤前,还包括:判断折臂机构是否处于工作状态,若是,则报警并限制动作,结束;若否,则报警但不限制动作,进入下一步。
13、优选地,所述报警但不限制动作后,还包括:显示是否进行连接件调平,若接收到同意的信息,则控制器限制其他动作输出,开始调平操作;若接收到到不同意的信息,则结束。
14、优选地,所述调平操作步骤中,在每次调平操作后,还包括:判断连接体相对于基座的角度是否在第二设定角度范围内,若是,则结束;若否,则返回调平操作步骤再进行调平操作。
15、相对于现有技术,本发明折臂机构控制系统与方法,通过设置连接体角度检测装置、油缸控制装置,连接体角度检测装置用于检测连接体相对于基座的角度,油缸控制装置连接连接体调平油缸,用于根据连接体角度检测装置检测到的连接体相对于基座的角度,控制连接体调平油缸伸缩来调节连接体角度,从而能方便地检测并调节连接体的倾斜角度,消除连接体倾斜所带来的安全隐患。
技术特征:
1.一种折臂机构控制系统,所述折臂机构包括安装于基座上的折臂、主臂,以及连接主臂与折臂的连接体,其特征在于,所述控制系统包括连接体调平油缸、连接体角度检测装置、油缸控制装置,所述连接体调平油缸安装于折臂上,活塞杆连接连接体,所述连接体角度检测装置用于检测连接体相对于基座的角度,所述油缸控制装置连接连接体调平油缸,用于根据连接体角度检测装置检测到的连接体相对于基座的角度,控制连接体调平油缸伸缩来调节连接体角度。
2.如权利要求1所述的折臂机构控制系统,其特征在于,所述连接体角度检测装置包括连接体角度传感器、基座水平传感器,所述连接体角度传感器用于检测连接体的绝对角度,所述基座水平传感器用于检测基座相对于水平面的角度,以通过连接体角度传感器、基座水平传感器所测得的角度值得到连接体相对于基座的角度。
3.如权利要求1所述的折臂机构控制系统,其特征在于,所述油缸控制装置包括控制器、第一电磁开关阀、第二电磁开关阀、第三电磁开关阀、第四电磁开关阀,所述第一电磁开关阀位于连接体调平油缸无杆腔与油箱之间,所述第二电磁开关阀位于连接体调平油缸无杆腔与压力油入口之间,所述第三电磁开关阀、第四电磁开关阀并联位于第二电磁开关阀与压力油入口之间,控制器连接连接体角度检测装置、第一电磁开关阀、第二电磁开关阀、第三电磁开关阀、第四电磁开关阀,当连接体远离折臂倾斜需要调平时,控制器输出让第一电磁开关阀、第三电磁开关阀得电,将连接体调平油缸无杆腔液压油从第一电磁开关阀释放回油箱,连接体调平油缸活塞杆缩回,连接体朝折臂旋转;当连接体朝折臂倾斜需要调平时,控制器输出让第二电磁开关阀、第四电磁开关阀得电,液压油进入连接体调平油缸无杆腔,连接体调平油缸活塞杆伸出,连接体远离折臂旋转。
4.如权利要求3所述的折臂机构控制系统,其特征在于,还包括折臂变幅油缸,所述折臂变幅油缸安装于基座上,活塞杆连接折臂;所述折臂变幅油缸的无杆腔连接第二电磁开关阀,在第二电磁开关阀失电状态连接第二电磁开关阀与第三电磁开关阀或第四电磁开关阀之间的管路,有杆腔连接第二电磁开关阀与连接体调平油缸无杆腔之间的管路。
5.如权利要求3所述的折臂机构控制系统,其特征在于,所述第三电磁开关阀或第四电磁开关阀与连接体调平油缸有杆腔之间还设有能用于手动操作的第五开关阀,所述第一电磁开关阀具手动操作功能用以手动调节连接体角度。
6.一种折臂机构控制方法,其特征在于,使用如权利要求3至5任一所述的折臂机构控制系统,所述控制方法包括:
7.如权利要求6所述的折臂机构控制方法,其特征在于,所述判断步骤中,控制器判断连接体是否倾斜需要调平包括:连接体相对于基座的角度是否在第一设定角度范围内,若是,则不需要调平;若否,则需要调平。
8.如权利要求6所述的折臂机构控制方法,其特征在于,所述控制器判断步骤后调平操作步骤前,还包括:判断折臂机构是否处于工作状态,若是,则报警并限制动作,结束;若否,则报警但不限制动作,进入下一步。
9.如权利要求8所述的折臂机构控制方法,其特征在于,所述报警但不限制动作后,还包括:显示是否进行连接件调平,若接收到同意的信息,则控制器限制其他动作输出,开始调平操作;若接收到到不同意的信息,则结束。
10.如权利要求6所述的折臂机构控制方法,其特征在于,所述调平操作步骤中,在每次调平操作后,还包括:判断连接体相对于基座的角度是否在第二设定角度范围内,若是,则结束;若否,则返回调平操作步骤再进行调平操作。
技术总结
本申请公开了一种折臂机构控制系统,所述折臂机构包括安装于基座上的折臂、主臂,以及连接主臂与折臂的连接体,所述控制系统包括连接体调平油缸、连接体角度检测装置、油缸控制装置,所述连接体调平油缸安装于折臂上,活塞杆连接连接体,所述连接体角度检测装置用于检测连接体相对于基座的角度,所述油缸控制装置连接连接体调平油缸,用于根据连接体角度检测装置检测到的连接体相对于基座的角度,控制连接体调平油缸伸缩来调节连接体角度。本申请还提供一种折臂机构控制方法。本申请提供的折臂机构控制系统与方法,能方便地检测并调节连接体的倾斜角度,消除连接体倾斜所带来的安全隐患。
技术研发人员:邹思懿,刘国良,刘枭
受保护的技术使用者:湖南星邦智能装备股份有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!