一种往复摆动的镜片夹取机械手的制作方法
本技术涉及光学镜头夹取领域,特别涉及一种往复摆动的镜片夹取机械手。
背景技术:
1、在光学镜头中一般包括中部具有阶梯槽的镜框以及安装于阶梯槽的镜片,在实际的生产过程中,因为镜片为尺寸较小且厚度较小的透明片体,因此其实际生产中,主要采用吸盘夹取并实现其安装。
2、但是现有的吸盘一般设置在多轴机器人上,将镜框固定于相应的治具上,这种结构对于多轴机器人的精密度要求比较高(相应的造价也比较高),同时采用多轴机器人单一运动机构,镜片的安装效率较低。
3、例如中国专利202122491926.3,该结构只能实现单一位置的夹取和放下,夹取效率较低。
技术实现思路
1、本实用新型的主要目的是提出一种往复摆动的镜片夹取机械手,旨在通过往复夹取的机械结构,实现镜片的夹取和移动。
2、为实现上述目的,本实用新型提出一种往复摆动的镜片夹取机械手,包括:
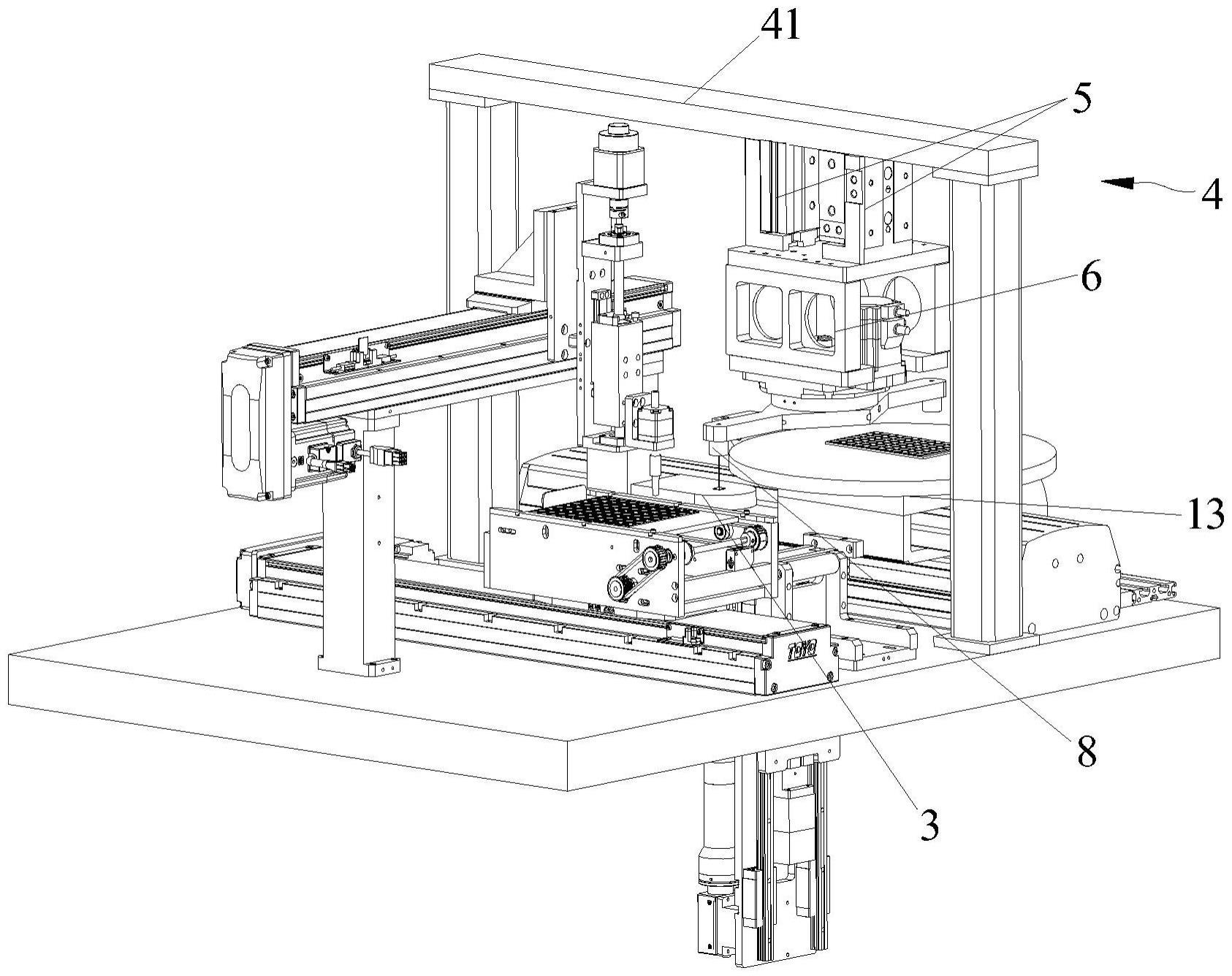
3、镜片移动机构,所述镜片移动机构包括机架、设于机架的纵向移动架、设于纵向移动架的横向移动架以及设于横向移动架的圆形基座,所述圆形基座用于放置定位膜,所述定位膜设有切割成型的镜片,所述机架设有基准点,所述纵向移动和横向移动架可带动未被夹取的镜片朝基准点的位置移动;
4、中转台,所述中转台用于放置圆形基座的镜片;
5、夹取机构,所述夹取机构包括悬空架、设于悬空架的垂向移动架、设于垂向移动架的摆动装置、设于摆动装置的夹持臂以及设于夹持臂的吸盘;所述吸盘可将镜片从基座移动至中转台的位置。
6、本实用新型技术方案在实际的夹取中,机架设有基准点,中转台为第二基准点,夹取机构的吸盘以基准点和第二基准点为基点作往复夹持、放下的动作,使得镜片移动更快捷,稳定性更好;同时采用镜片移动,基准点不变的移动方式,使得机械结构更稳定,夹取效率更高。
技术特征:
1.一种往复摆动的镜片夹取机械手,其特征在于,包括:
2.如权利要求1所述的往复摆动的镜片夹取机械手,其特征在于:所述纵向移动架包括纵向导轨、滑动安装于纵向导轨的纵向滑块以及设于纵向导轨的纵向丝杠副,所述横向移动架设于纵向滑块上。
3.如权利要求1所述的往复摆动的镜片夹取机械手,其特征在于:所述基准点设有射频感应装置,所述吸盘设有与射频感应装置相配合的第二射频感应装置。
4.如权利要求1所述的往复摆动的镜片夹取机械手,其特征在于:所述垂向移动架由两个间隔设置的垂向伸缩电机组成。
5.如权利要求1所述的往复摆动的镜片夹取机械手,其特征在于:所述摆动装置包括中部设有枢转孔的定位座、枢转安装于定位座的枢转轴以及设于定位座上方的旋转电机,所述夹持臂设于枢转轴上。
6.如权利要求1所述的往复摆动的镜片夹取机械手,其特征在于:所述旋转电机通过齿轮组或凸轮机构与枢转轴相连接。
7.如权利要求5所述的往复摆动的镜片夹取机械手,其特征在于:所述夹持臂从枢转轴单侧延伸。
8.如权利要求5所述的往复摆动的镜片夹取机械手,其特征在于:所述夹持臂从枢转轴中部对称延伸,且夹持臂的两端分别设有吸盘。
技术总结
本技术公开了一种往复摆动的镜片夹取机械手,包括镜片移动机构、中转台和夹取机构,定位膜设有切割成型的镜片,机架设有基准点,所述纵向移动和横向移动架可带动未被夹取的镜片朝基准点的位置移动,夹取机构包括悬空架、设于悬空架的垂向移动架、设于垂向移动架的摆动装置、设于摆动装置的夹持臂以及设于夹持臂的吸盘。在实际的夹取中,机架设有基准点,中转台为第二基准点,夹取机构的吸盘以基准点和第二基准点为基点作往复夹持、放下的动作,使得镜片移动更快捷,稳定性更好;同时采用镜片移动,基准点不变的移动方式,使得机械结构更稳定,夹取效率更高。
技术研发人员:刘钊宇
受保护的技术使用者:东莞市微科光电科技有限公司
技术研发日:20230105
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!