一种皮带输送机智能巡检机器人的制作方法
本技术涉及智能巡检机器人领域,尤其涉及一种皮带输送机智能巡检机器人。
背景技术:
1、智能巡检机器人是一种高科技设备,主要能够替代人工进行大量繁琐的作业,监控设备的运行状况,及时将数据反应给终端,工作人员能够通过终端显示屏快速的掌握整个生产区域内部的装置运作情况,皮带输送机又称胶带输送机,广泛应用于家电、电子、电器、机械、烟草、注塑、邮电、印刷、食品等各行各业,物件的组装、检测、调试、包装及运输等,皮带输送机是生产上料下料运输的重要设备。
2、但是,现有的智能巡检机器人在巡检中主要通过摄像模块进行检查,其相当于机器人的眼睛,然而皮带输送机工作场所运输原料容易产生扬尘,机器人长时间工作,其摄像模块的镜头容易逐渐模糊,无法清楚检测,另外机器人移动使用的备用电源,当电能耗尽,无法及时补充,因此,需要设计一种皮带输送机智能巡检机器人以解决上述问题。
技术实现思路
1、针对背景技术中存在的现有的智能巡检机器人在巡检中主要通过摄像模块进行检查,其相当于机器人的眼睛,然而皮带输送机工作场所运输原料容易产生扬尘,机器人长时间工作,其摄像模块的镜头容易逐渐模糊,无法清楚检测,另外机器人移动使用的备用电源,当电能耗尽,无法及时补充问题,提出一种皮带输送机智能巡检机器人。
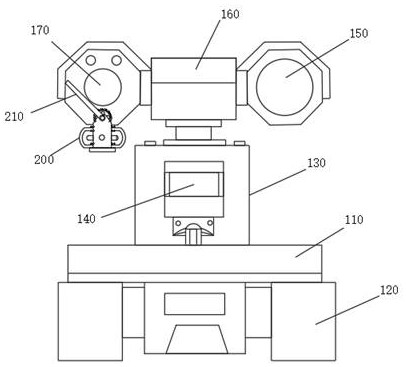
2、本实用新型提出一种皮带输送机智能巡检机器人,包括承载台、补偿机构和驱动轮组件,所述驱动轮组件的顶端设置有承载台,所述承载台的顶端设置有蓄电箱,所述蓄电箱的正面设置有激光传感器,所述蓄电箱的顶端设置有控制模块,所述控制模块的两侧分别设置有红外热像仪和可见光摄像模块,所述可见光摄像模块的底端设置有清洁机构,所述清洁机构包括刮尘杆、外卡齿、旋转齿轮、往复环、内卡齿和双层固定架。
3、优选的,所述双层固定架的内部滑动安装有往复环,所述往复环的内部对称设置有内卡齿,所述往复环的顶端设置有外卡齿,所述双层固定架的内部转动安装有有主动半齿轮,所述主动半齿轮的一端连接有驱动电机,所述双层固定架的顶端设置有旋转齿轮。
4、优选的,所述旋转齿轮的中心输出轴连接有刮尘杆,所述刮尘杆的一侧设置有雨刮条。
5、优选的,所述外卡齿和旋转齿轮的外侧啮合安装,所述主动半齿轮的一侧与内卡齿啮合连接。
6、优选的,所述补偿机构包括固定板,所述固定板的顶端转动安装有转动盘,所述转动盘的顶端设置有连接杆,所述连接杆的顶端转动安装有光伏板。
7、优选的,所述固定板的顶端设置有支撑板,所述支撑板的内部螺纹安装有螺栓,所述螺栓的一侧设置有定位垫。
8、优选的,所述光伏板的输出端通过导线与蓄电箱的输入端电连接。
9、与现有技术相比,本实用新型的有益效果是:
10、1、通过设置有清洁机构,驱动电机带动主动半齿轮旋转,使得主动半齿轮上的卡合齿和内卡齿啮合,带动往复环在双层固定架上左右滑动,往复环滑动的同时外卡齿带动旋转齿轮往复旋转,使得刮尘杆能够左右摆动对可见光摄像模块的表面进行清理,在下雨天也能够将雨水快速的刮去,保持镜头的清晰。
11、2、通过设置有补偿机构,光伏板能够接受光照,然后将光能转化为电能,进入蓄电箱的内部进行储存,转动盘在固定板的内部旋转,使得光伏板的角度可以调整,旋转螺栓,使得螺栓的一侧定位垫挤压转动盘,限制转动盘自由旋转,使得光伏板定位,保证光伏板接受最大的光照。
技术特征:
1.一种皮带输送机智能巡检机器人,其特征在于,包括承载台(110)、补偿机构(300)和驱动轮组件(120),所述驱动轮组件(120)的顶端设置有承载台(110),所述承载台(110)的顶端设置有蓄电箱(130),所述蓄电箱(130)的正面设置有激光传感器(140),所述蓄电箱(130)的顶端设置有控制模块(160),所述控制模块(160)的两侧分别设置有红外热像仪(150)和可见光摄像模块(170),所述可见光摄像模块(170)的底端设置有清洁机构(200),所述清洁机构(200)包括刮尘杆(210)、外卡齿(211)、旋转齿轮(212)、往复环(213)、内卡齿(214)和双层固定架(215)。
2.根据权利要求1所述的一种皮带输送机智能巡检机器人,其特征在于,所述双层固定架(215)的内部滑动安装有往复环(213),所述往复环(213)的内部对称设置有内卡齿(214),所述往复环(213)的顶端设置有外卡齿(211),所述双层固定架(215)的内部转动安装有有主动半齿轮(216),所述主动半齿轮(216)的一端连接有驱动电机,所述双层固定架(215)的顶端设置有旋转齿轮(212)。
3.根据权利要求1所述的一种皮带输送机智能巡检机器人,其特征在于,所述旋转齿轮(212)的中心输出轴连接有刮尘杆(210),所述刮尘杆(210)的一侧设置有雨刮条。
4.根据权利要求2所述的一种皮带输送机智能巡检机器人,其特征在于,所述外卡齿(211)和旋转齿轮(212)的外侧啮合安装,所述主动半齿轮(216)的一侧与内卡齿(214)啮合连接。
5.根据权利要求1所述的一种皮带输送机智能巡检机器人,其特征在于,所述补偿机构(300)包括固定板(312),所述固定板(312)的顶端转动安装有转动盘(311),所述转动盘(311)的顶端设置有连接杆(310),所述连接杆(310)的顶端转动安装有光伏板(316)。
6.根据权利要求5所述的一种皮带输送机智能巡检机器人,其特征在于,所述固定板(312)的顶端设置有支撑板(314),所述支撑板(314)的内部螺纹安装有螺栓(315),所述螺栓(315)的一侧设置有定位垫(313)。
7.根据权利要求5所述的一种皮带输送机智能巡检机器人,其特征在于,所述光伏板(316)的输出端通过导线与蓄电箱(130)的输入端电连接。
技术总结
本技术涉及智能巡检机器人领域,尤其涉及一种皮带输送机智能巡检机器人,包括承载台和驱动轮组件,所述驱动轮组件的顶端设置有承载台,所述承载台的顶端设置有蓄电箱,所述蓄电箱的正面设置有激光传感器,所述蓄电箱的顶端设置有控制模块,所述控制模块的两侧分别设置有红外热像仪和可见光摄像模块。本技术通过设置有清洁机构,驱动电机带动主动半齿轮旋转,使得主动半齿轮上的卡合齿和内卡齿啮合,带动往复环在双层固定架上左右滑动,往复环滑动的同时外卡齿带动旋转齿轮往复旋转,使得刮尘杆能够左右摆动对可见光摄像模块的表面进行清理,在下雨天也能够将雨水快速的刮去,保持镜头的清晰。
技术研发人员:王晓坤,宋伟健,周祖鑫
受保护的技术使用者:中国黄金集团内蒙古矿业有限公司
技术研发日:20230201
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!