一种三轴式抓取机构的制作方法
本技术涉及机械臂,具体涉及一种三轴式抓取机构。
背景技术:
1、机械臂是一种能模仿人手臂的某些动作功能,并按固定程序抓取、搬运物件或操作工具的自动操作装置,机械臂可以通过编程来完成各种预期的作业,进而代替人的繁重劳动以实现生产的机械化和自动化,也可以在有害环境下操作以保护人身安全,因而被广泛地应用于机械制造领域。
2、目前现有的抛光机器人很多还采用人工上下料的方式,其不仅存在上下料速度较慢、费时费力、生产成本高的问题,而且需要配备额外的设备或人手来辅助完成工件制品的取出或摆放,不利于机器人实现完全自动化,因此有必要进行加以改进。
3、此外,现有机械臂的夹爪大多采用直臂式的气动夹持件,即气动夹持件的两个夹爪为直杆状,由于抛光机器人所加工的工件大多为重量较重的金属工件,这种结构的夹爪夹持金属工件的稳定性不好,工件容易在加工的过程中掉落。
技术实现思路
1、本实用新型的目的在于提供一种三轴式抓取机构,其可以提高机器人的工作效率、降低生产成本,有利于机器人实现完全自动化。
2、为实现上述目的,本实用新型采用以下技术方案:
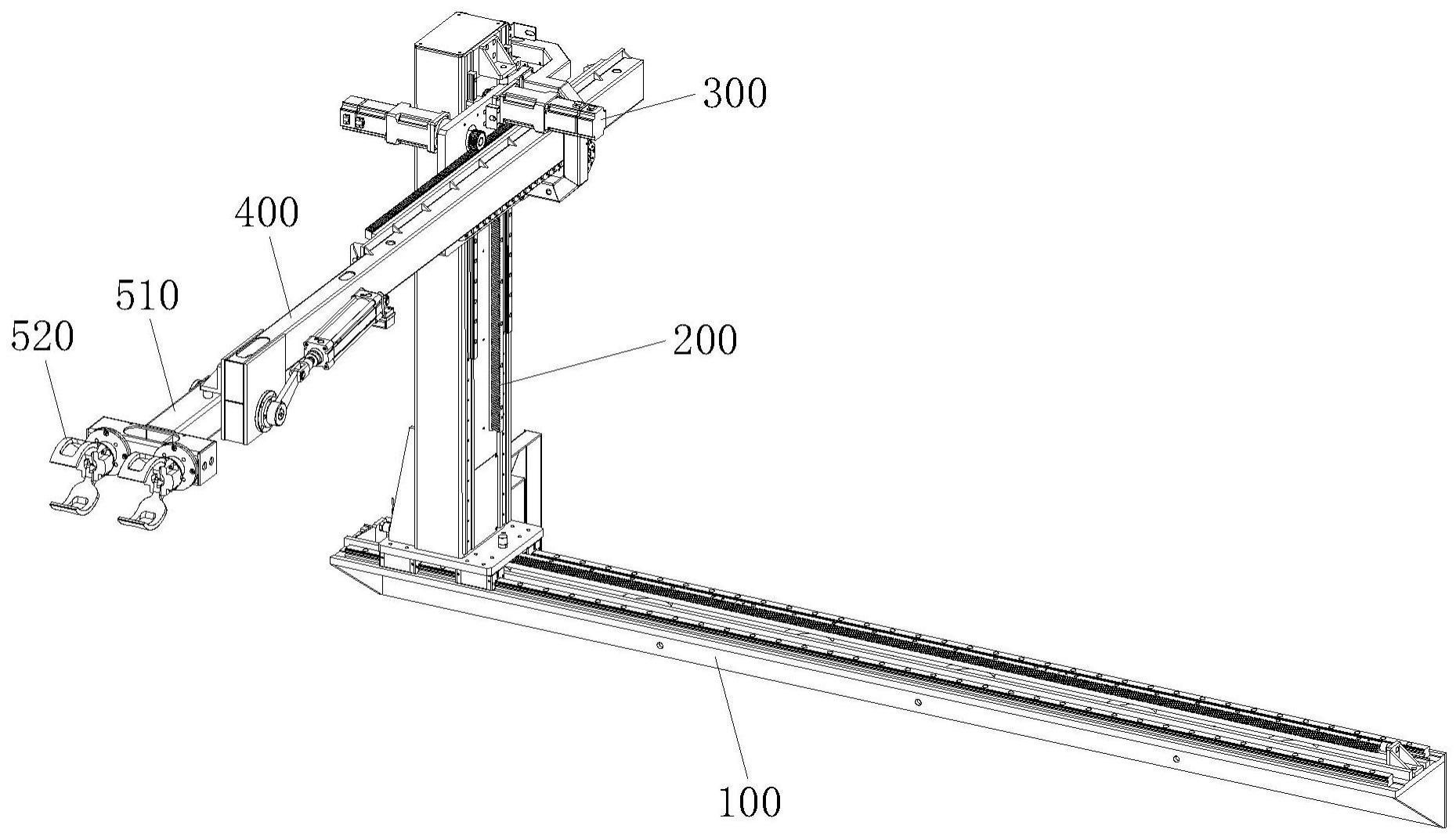
3、一种三轴式抓取机构,包括机座、横移机构、竖移机构、纵移机构及夹持机构;所述横移机构设置于所述机座上,并可沿着所述机座的长度方向进行平移;所述竖移机构设置于所述横移机构上,并可相对所述横移机构进行竖向移动;所述纵移机构设置于所述竖移机构上,并可相对所述竖移机构进行纵向移动;所述夹持机构包括摆臂组件和夹持件,所述摆臂组件设置于所述纵移机构上,并可相对所述纵移机构进行摆动,所述夹持件设置于所述摆臂组件上,并可相对所述摆臂组件进行开合,以夹取工件。
4、进一步地,所述摆臂组件包括摆动件、转轴、转臂及连杆,所述摆动件和转轴分别设置于所述纵移机构上,且所述摆动件驱动所述转轴相对所述纵移机构进行转动,所述转臂安装于所述转轴上,所述夹持件安装于所述转臂上,所述摆动件采用气缸,所述连杆的一端与气缸的活塞杆相铰接、另一端铰接于所述转轴上。
5、进一步地,所述夹持件包括夹持座、上夹爪、下夹爪及开合件,所述夹持座固设于所述转臂上,所述夹持座上并排铰接有两对所述上夹爪和下夹爪,各对所述上夹爪和下夹爪相对其中部弯曲形成呈o形的夹持空间,所述开合件设置于所述夹持座中,用于控制所述上夹爪、下夹爪的张开和收合。
6、进一步地,所述夹持座中设置有安装口,并在其前端设置有与所述安装口相通的安装槽,所述开合件设置于所述安装口中,所述上夹爪和下夹爪的末端分别铰接于所述开合件上,并通过连接轴与所述安装槽的侧壁相铰接。
7、进一步地,所述横移机构包括第一导轨、第一支座、第一滑块及第一驱动件,所述第一导轨横向布设于所述机座上,所述第一支座的底部设置有所述第一滑块,所述第一滑块与第一导轨滑动配合,所述第一驱动件用于驱动所述第一支座进行横向平移。
8、进一步地,所述第一驱动件包括第一齿条、第一电机及第一齿轮,所述第一齿条横向布设于所述机座上,所述第一电机设置于所述第一支座上,所述第一齿轮与第一电机的机轴相连接,并与所述第一齿条相啮合。
9、进一步地,所述竖移机构包括第二导轨、第二支座、第二滑块及第二驱动件,所述第二导轨竖向布设于所述第一支座上,所述第二支座的后侧面设置有所述第二滑块,所述第二滑块与第二导轨滑动配合,所述第二驱动件用于驱动所述第二支座进行竖向平移。
10、进一步地,所述第二驱动件包括第二齿条、第二电机及第二齿轮,所述第二齿条竖向布设于所述第一支座上,所述第二电机设置于所述第二支座上,所述第二齿轮与第二电机的机轴相连接,并与所述第二齿条相啮合。
11、进一步地,所述纵移机构包括第三滑块、第三支座、第三导轨及第三驱动件,所述第二支座的前侧面设置有所述第三滑块,所述第三支座的后侧面纵向布设有所述第三导轨,所述第三导轨与第三滑块滑动配合,所述第三驱动件用于驱动所述第三支座进行纵向平移。
12、进一步地,所述第三驱动件包括第三齿条、第三电机及第三齿轮,所述第三齿条纵向布设于所述第三支座上,所述第三电机设置于所述第二支座上,所述第三齿轮与第三电机的机轴相连接,并与所述第三齿条相啮合。
13、采用上述技术方案后,本实用新型与背景技术相比,具有如下优点:
14、1、本实用新型通过横移机构、竖移机构、纵移机构来控制夹持机构在xyz三轴方向上的移动,并通过摆臂组件来控制夹持件进行摆动,使夹持件夹取工件后可以摆动至所需角度,以便于工件的取放,不仅提高了机器人的工作效率、降低了生产成本,而且有利于机器人实现完全自动化。
15、2、本实用新型采用两对夹爪设计,夹爪夹取工件时更加稳定,不易偏发生摆,工件在加工的过程中也不易掉落,且夹爪相对其中部弯曲形成o形的夹持空间,便于长条形工件和不规则物件的抓取。
16、3、本实用新型中上夹爪和下夹爪的末端分别铰接于开合件上,并通过连接轴与夹持座的安装槽侧壁相铰接,通过采用这种杠杆原理的结构设计,可以使上夹爪和下夹爪的行程和抓紧力更大,更加便于金属件的加工。
技术特征:
1.一种三轴式抓取机构,其特征在于:包括机座、横移机构、竖移机构、纵移机构及夹持机构;所述横移机构设置于所述机座上,并可沿着所述机座的长度方向进行平移;所述竖移机构设置于所述横移机构上,并可相对所述横移机构进行竖向移动;所述纵移机构设置于所述竖移机构上,并可相对所述竖移机构进行纵向移动;所述夹持机构包括摆臂组件和夹持件,所述摆臂组件设置于所述纵移机构上,并可相对所述纵移机构进行摆动,所述夹持件设置于所述摆臂组件上,并可相对所述摆臂组件进行开合,以夹取工件。
2.如权利要求1所述的一种三轴式抓取机构,其特征在于:所述摆臂组件包括摆动件、转轴、转臂及连杆,所述摆动件和转轴分别设置于所述纵移机构上,且所述摆动件驱动所述转轴相对所述纵移机构进行转动,所述转臂安装于所述转轴上,所述夹持件安装于所述转臂上,所述摆动件采用气缸,所述连杆的一端与气缸的活塞杆相铰接、另一端铰接于所述转轴上。
3.如权利要求2所述的一种三轴式抓取机构,其特征在于:所述夹持件包括夹持座、上夹爪、下夹爪及开合件,所述夹持座固设于所述转臂上,所述夹持座上并排铰接有两对所述上夹爪和下夹爪,各对所述上夹爪和下夹爪相对其中部弯曲形成呈o形的夹持空间,所述开合件设置于所述夹持座中,用于控制所述上夹爪、下夹爪的张开和收合。
4.如权利要求3所述的一种三轴式抓取机构,其特征在于:所述夹持座中设置有安装口,并在其前端设置有与所述安装口相通的安装槽,所述开合件设置于所述安装口中,所述上夹爪和下夹爪的末端分别铰接于所述开合件上,并通过连接轴与所述安装槽的侧壁相铰接。
5.如权利要求1所述的一种三轴式抓取机构,其特征在于:所述横移机构包括第一导轨、第一支座、第一滑块及第一驱动件,所述第一导轨横向布设于所述机座上,所述第一支座的底部设置有所述第一滑块,所述第一滑块与第一导轨滑动配合,所述第一驱动件用于驱动所述第一支座进行横向平移。
6.如权利要求5所述的一种三轴式抓取机构,其特征在于:所述第一驱动件包括第一齿条、第一电机及第一齿轮,所述第一齿条横向布设于所述机座上,所述第一电机设置于所述第一支座上,所述第一齿轮与第一电机的机轴相连接,并与所述第一齿条相啮合。
7.如权利要求5所述的一种三轴式抓取机构,其特征在于:所述竖移机构包括第二导轨、第二支座、第二滑块及第二驱动件,所述第二导轨竖向布设于所述第一支座上,所述第二支座的后侧面设置有所述第二滑块,所述第二滑块与第二导轨滑动配合,所述第二驱动件用于驱动所述第二支座进行竖向平移。
8.如权利要求7所述的一种三轴式抓取机构,其特征在于:所述第二驱动件包括第二齿条、第二电机及第二齿轮,所述第二齿条竖向布设于所述第一支座上,所述第二电机设置于所述第二支座上,所述第二齿轮与第二电机的机轴相连接,并与所述第二齿条相啮合。
9.如权利要求7所述的一种三轴式抓取机构,其特征在于:所述纵移机构包括第三滑块、第三支座、第三导轨及第三驱动件,所述第二支座的前侧面设置有所述第三滑块,所述第三支座的后侧面纵向布设有所述第三导轨,所述第三导轨与第三滑块滑动配合,所述第三驱动件用于驱动所述第三支座进行纵向平移。
10.如权利要求9所述的一种三轴式抓取机构,其特征在于:所述第三驱动件包括第三齿条、第三电机及第三齿轮,所述第三齿条纵向布设于所述第三支座上,所述第三电机设置于所述第二支座上,所述第三齿轮与第三电机的机轴相连接,并与所述第三齿条相啮合。
技术总结
本技术公开了一种三轴式抓取机构,其包括机座、横移机构、竖移机构、纵移机构及夹持机构;横移机构可沿着机座的长度方向进行平移;竖移机构可相对横移机构进行竖向移动;纵移机构可相对竖移机构进行纵向移动;夹持机构包括摆臂组件和夹持件,摆臂组件设置于纵移机构上,并可相对纵移机构进行摆动,夹持件设置于摆臂组件上,并可相对摆臂组件进行开合,以夹取工件。本技术通过横移机构、竖移机构、纵移机构来控制夹持机构在XYZ三轴方向上的移动,并通过摆臂组件来控制夹持件进行摆动,使夹持件夹取工件后可以摆动至所需角度,以便于工件的取放,不仅提高了机器人的工作效率、降低了生产成本,而且有利于机器人实现完全自动化。
技术研发人员:赖定仁,周辉
受保护的技术使用者:厦门鼎铸智能设备有限公司
技术研发日:20230215
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!