一种涨紧机构及移动机器人的制作方法
本申请涉及移动机器人领域,尤其涉及一种涨紧机构及移动机器人。
背景技术:
1、在智能物流的高速发展中,便捷高效的移动机器人逐渐替代了人工搬运工作。其中自动导引运输车是较为常见的移动机器人类型,也是现代自动化工业物流的重要设备,它为物流运输的集成化和高效化提供了保障。
2、移载装置是自动导引运输车实现物料装载、运输等操作的重要结构,通常会采用滚筒、牵引轴等结构来实现物料的移载功能。简单的轴类移载装置无法保证物料在移载过程中的稳定性,而现有的气动驱动涨紧机构体积过大,无法运用于自动导引运输车等移动机器人上。
3、基于自动导引运输车的移载装置结构简易性的要求,本申请提供一种适用于自动导引运输车且稳定性高的涨紧机构。
技术实现思路
1、有鉴于此,本申请一个或多个实施例提供一种涨紧机构及移动机器人。
2、为实现上述目的,本申请一个或多个实施例提供技术方案如下:
3、第一方面,本申请提供了一种涨紧机构,所述机构包括:
4、具有容纳腔的轴状载具;
5、所述容纳腔内设有导块组件,所述导块组件包括滑动件和预紧件;
6、所述预紧件靠近容纳腔内壁设置,所述预紧件靠近容纳腔内壁的外端面上设置有涨紧件,所述载具内壁上设置有通孔,所述涨紧件通过所述通孔且穿透所述轴状载具;
7、驱动组件,所述驱动组件连接所述滑动件,所述驱动组件带动所述滑动件滑动,以使得所述预紧件被挤压或者松动,所述涨紧件跟随所述预紧件移动。
8、可选地,所述容纳腔内还设置有弹性件,所述弹性件套设于所述的涨紧件,且所述的弹性件向所述的预紧件施加朝向所述容纳腔中心的力。
9、可选地,所述容纳腔内还设置有弹性件,所述弹性件一端固定连接所述容纳腔内壁,所述弹性件另一端固定连接所述预紧件,所述的弹性件向所述的预紧件施加朝向容纳腔中心的力。
10、可选地,所述导块组件还包括至少两个预紧件,所述预紧件以轴中心线为中心对称设置,所述滑动件位于所述两个对称设置的预紧件之间;
11、所述预紧件远离容纳腔内壁的内端面设有斜坡,所述滑动件外壁设置有楔形面,所述斜坡的坡度配合所述楔形面。
12、可选地,所述涨紧件以轴中心线为中心对称设置。
13、可选地,所述容纳腔内还设置有连接装置和若干个所述导块组件;
14、所述连接装置包括连接件和导向杆,所述连接件固定连接若干个所述预紧件,所述导向杆固定连接若干个所述滑动件。
15、可选地,所述容纳腔内还设置有运动导轨和若干个所述导块组件,所述滑动件固定连接至所述运动导轨上;
16、所述驱动组件连接所述运动导轨端部,所述驱动组件带动所述运动导轨滑动,所述滑动件跟随所述运动导轨移动。
17、可选地,所述通孔内连接有限位机构,所述限位机构内设有孔洞,所述孔洞内径适配所述涨紧轴的直径。
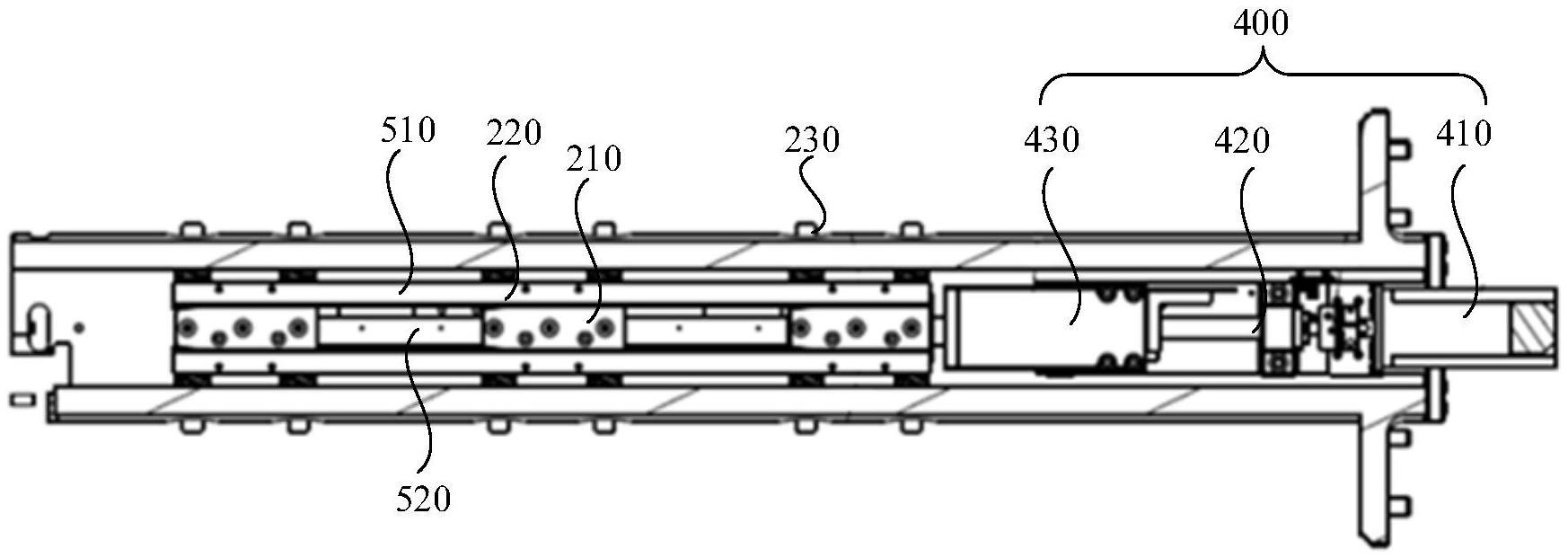
18、可选地,所述驱动组件包括电机,丝杆组件和连杆;
19、所述电机驱动所述丝杆组件转动,所述丝杆组件带动连杆,所述连杆带动所述滑动件滑动;
20、所述连杆和所述丝杆组件在轴中心线上投影至少部分重叠。
21、可选地,所述连杆呈l形,所述连杆的长臂平行连接于所述丝杆组件上,所述连杆的短臂连接所述滑动件。
22、可选地,所述驱动组件至少部分外置于所述轴状载具端口。
23、第二方面,本申请提供了一种移动机器人,包括移动机器人本体和上述任一所述的涨紧机构,所述涨紧机构可拆卸安装于所述移动机器人上。
24、在上述技术方案中,涨紧机构包括具有容纳腔的轴状载具,所述容纳腔内设置有驱动组件,滑动件,预紧件和涨紧件。整个涨紧机构安装于自动导引运输车的移载装置上,当自动导引运输车将轴状载具叉取到需要运输的物料后,驱动组件将轴向动力传递给滑动件使其沿轴中心线滑动,从而使得滑动件挤压所述预紧件,被挤压后的预紧件带动涨紧件向上运动,涨紧件通过载具内壁的通孔穿出所述轴状载具,使得物料内侧获得向外的推力,确保物料不会从移载装置上掉落。
25、采用上述技术方案,可以增加自动导引运输车的移载装置在物料搬运上的稳固性,提高移载装置的安全性和可靠性。此外,上述方案在不破坏移载装置上轴状载具的整体结构强度和刚度的情况下,将整套涨紧机构内置于移载装置的轴状载具中,可以提高移载装置的空间利用率和结构紧凑性。
技术特征:
1.一种涨紧机构,其特征在于,所述机构包括:
2.根据权利要求1所述涨紧机构,其特征在于,所述容纳腔内还设置有弹性件,所述弹性件套设于所述的涨紧件,且所述的弹性件向所述的预紧件施加朝向所述容纳腔中心的力。
3.根据权利要求1所述涨紧机构,其特征在于,所述容纳腔内还设置有弹性件,所述弹性件一端固定连接所述容纳腔内壁,所述弹性件另一端固定连接所述预紧件,所述的弹性件向所述的预紧件施加朝向容纳腔中心的力。
4.根据权利要求1所述涨紧机构,其特征在于,所述导块组件还包括至少两个预紧件,所述预紧件以轴中心线为中心对称设置,所述滑动件位于所述两个对称设置的预紧件之间;
5.根据权利要求4所述涨紧机构,其特征在于,所述涨紧件以轴中心线为中心对称设置。
6.根据权利要求1所述涨紧机构,其特征在于,所述容纳腔内还设置有连接装置和若干个所述导块组件;
7.根据权利要求1所述涨紧机构,其特征在于,所述容纳腔内还设置有运动导轨和若干个所述导块组件,所述滑动件固定连接至所述运动导轨上;
8.根据权利要求1所述涨紧机构,其特征在于,所述通孔内连接有限位机构,所述限位机构内设有孔洞,所述孔洞内径适配所述涨紧件的直径。
9.根据权利要求1所述涨紧机构,其特征在于,所述驱动组件包括电机,丝杆组件和连杆;
10.根据权利要求9所述涨紧机构,其特征在于,所述连杆呈l形,所述连杆的长臂平行连接于所述丝杆组件上,所述连杆的短臂连接所述滑动件。
11.根据权利要求1所述涨紧机构,其特征在于,所述驱动组件至少部分外置于所述轴状载具端口。
12.一种移动机器人,其特征在于,包括移动机器人本体和权利要求1至11中任一所述的涨紧机构,所述涨紧机构可拆卸安装于所述移动机器人上。
技术总结
本申请提供一种涨紧机构,所述机构包括:具有容纳腔的轴状载具;所述容纳腔内设有导块组件,所述导块组件包括滑动件和预紧件;所述预紧件靠近容纳腔内壁设置,所述预紧件靠近容纳腔内壁的外端面上设置有涨紧件,所述载具内壁上设置有通孔,所述涨紧件通过所述通孔且穿透所述轴状载具;驱动组件,所述驱动组件连接所述滑动件,所述驱动组件带动所述滑动件滑动,以使得所述预紧件被挤压或者松动,所述涨紧件跟随所述预紧件移动。采用上述方案,可以增加自动导引运输车在物料搬运上的稳固性,提高它的安全性。此外,在不破坏移载装置上轴状载具的整体结构强度的情况下,上述方案内置整套涨紧机构,提高移载装置的空间利用率和结构紧凑性。
技术研发人员:张凌楷
受保护的技术使用者:杭州海康机器人股份有限公司
技术研发日:20230210
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!