一种自走型可变向装置、晶圆盒搬运装置的制作方法
本技术涉及半导体搬运加工设备,具体为一种自走型可变向装置、基于自走型可变向装置的晶圆盒搬运装置。
背景技术:
1、晶圆盒在半导体生产中主要起到放置和输送晶圆的作用,为了简化运输和尽可能降低被污染的风险,在制造过程中利用晶圆盒来搬运和储存晶圆。对于晶圆盒的搬运,有的采用搬运机器人,该方式虽也实现自动化,但是对于生产规模大的厂家而言,该搬运方式效率低,影响生产效率。若是采用过多搬运机器人,易出现机器人运行轨道重叠,影响到正常搬运。因而为满足高产能的需求,自动化物料搬运系统amhs应运而生。
2、该系统架设在工厂车间天花板的下方,生产设备的上方,可以使得晶圆的搬送过程不会影响到地面上人员的走动。amhs系统由软硬件共同组成,对于硬件部分,主要有存储部分和搬运部分构成。存储部分通过机械手、存储架等组成。搬运部分通过空中运输车、空中轨道等构成。因此,运输车是实现系统搬运不可或缺的一部分。
3、空中运输车的支撑依赖于支撑转向架,现有的支撑转向架通过行走轮和导向轮在轨道上行走以及导向来引导运输车,对于运输车运行的驱动以及驱动电源,需依赖其它结构,这便造成该运输车结构繁多,且由于不同的机构位于运输车不同的位置,驱动过程动作流程大,也因结构繁多,运输车整体的体积也大,在过多结构的干扰下影响整个运输车的运行稳定性,也影响后续的维护维修操作。
技术实现思路
1、基于此,有必要针对现有运输车结构复杂导致的动作流程多、运行不稳定的问题,提供一种自走型可变向装置、基于自走型可变向装置的晶圆盒搬运装置。
2、为实现上述目的,本实用新型采用了以下技术方案:
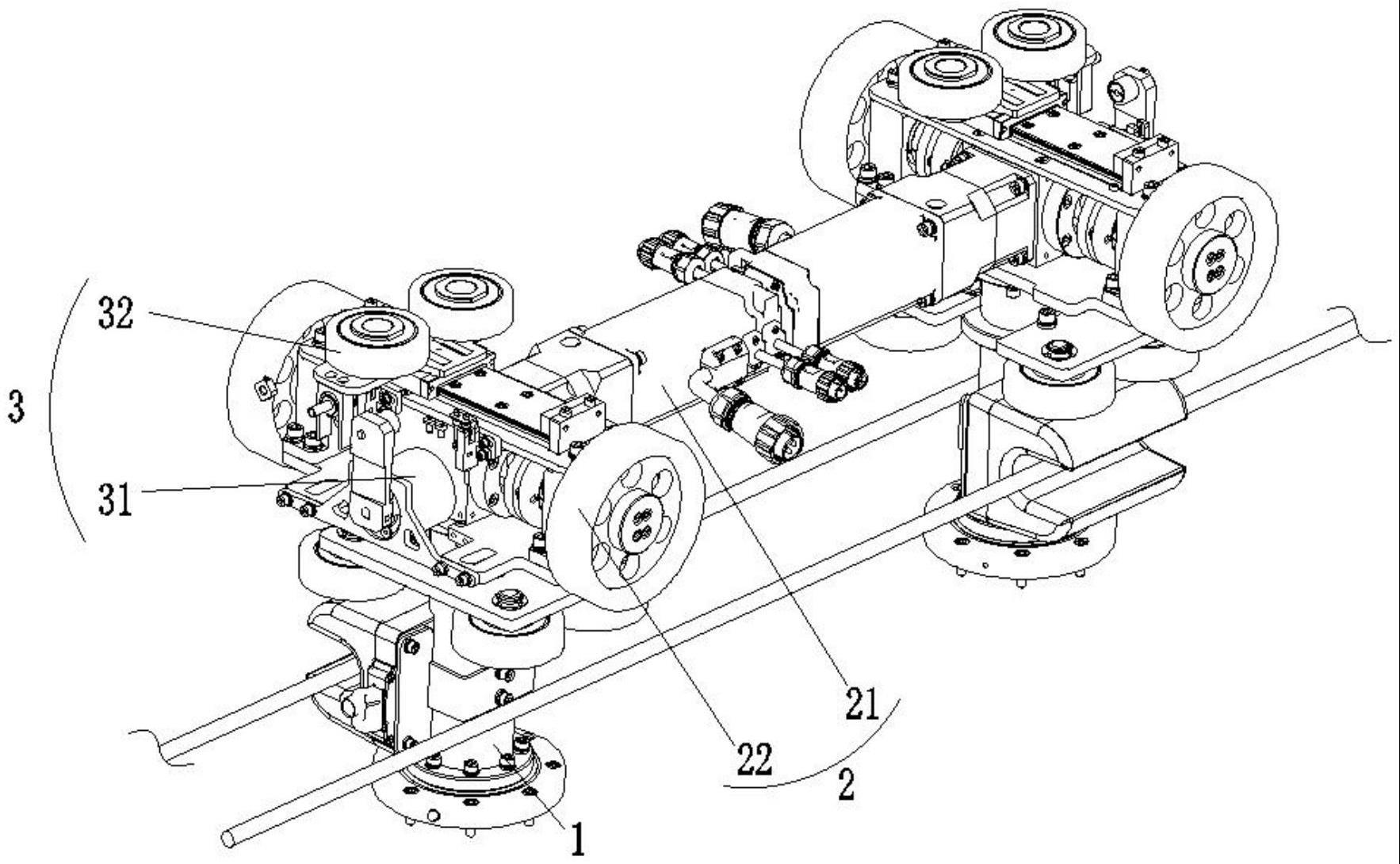
3、一种自走型可变向装置,其包括连接部件、驱动部件和变向部件。
4、连接部件的尾端与一个晶圆盒运输车相连。
5、驱动部件包括驱动件和行走轮。驱动件的底部与连接部件的首端相连,驱动件水平两侧的输出轴连接有行走轮,行走轮与一个搬运轨道相接触。
6、变向部件包括控制件和导向轮一。控制件设置在驱动件上,以驱动导向轮一线性往返移动。导向轮一与控制件活动连接且位于驱动件的上方,导向轮一的线性移动方向与行走轮的轴线方向相平行。
7、进一步的,控制件包括直线导轨、凸轮随动机构和位检测传感器。直线导轨的活动端与导向轮一的中轴通过轴承连接,直线导轨活动端的一侧部设置有凸起。凸轮随动机构设置在驱动件靠向凸起的一侧且与凸起相接触,以推动凸起线性往返移动。位检测传感器位于直线导轨靠向凸起的侧部两端,用以检测导向轮一的位置情况。
8、进一步的,控制件还包括限位块和缓冲块。直线导轨的两端设置有限位块。缓冲块安装在限位块的内侧。
9、进一步的,驱动件包括伺服电机、行星减速器和联轴器。伺服电机的输出轴与行星减速器相连,行星减速器水平两侧输出轴朝向行走轮,行走轮的中轴与行星减速器的输出轴通过联轴器相连。
10、进一步的,行星减速器的顶部连接有支撑板,直线导轨和位检测传感器分别安装在支撑板的顶壁和侧壁。
11、进一步的,行走轮中轴外周面设有稳固块,稳固块与行走轮中轴通过轴承连接,稳固块的顶端与支撑板连接。
12、进一步的,连接部件包括底部轴承、连接转轴、支架和取电模块。底部轴承设置在连接转轴的尾端外壁,连接转轴的首端与行星减速器相连。支架安装在连接转轴的外周面,支架侧壁且靠向其中一个行走轮处安装有取电模块。
13、进一步的,连接转轴的外周面连接有固定板,固定板的四角与导向轮二转动连接,导向轮二的轮外侧与搬运轨道的侧壁相接触。
14、本实用新型还涉及一种晶圆盒搬运装置,包括搬运轨道和运输部件。
15、运输部件包括运输车和自走型可变向机构。自走型可变向机构的底端与运输车活动连接。自走型可变向机构位于搬运轨道内且与搬运轨道相接触。其中,自走型可变向机构为前述自走型可变向装置。
16、与现有技术相比,本实用新型的有益效果包括:
17、1、本实用新型设计的自走型可变向装置将取电模块、变向部件及驱动部件集为一体,简化结构的同时缩小了整体体积,动作流程简便,转弯半径小,节省空间;导向轮一和导向轮二能够实现导向功能的同时导向轮一的线性移动还可满足变向的需求,进而在满足运行需求的同时也保障了运行的精准度及稳定性,提高整条产线的生产效率及良品率;
18、2、本实用新型通过取电模块与相应的励磁线配合,实现非接触模式取电,保证不产生灰尘的同时,可以做到长期持续运行免维护保养,节约保养停机造成的时间浪费及人工成本;
19、2、本实用新型通过自走型可变向装置配合运输车进行圆晶的搬运输送,结构简单,便于安装维护及调试;此外,由于整个装置基本上采用标准件,无需额外定制非标件,维护成本小。
技术特征:
1.一种自走型可变向装置,其用于晶圆盒的搬运,其特征在于,其包括:
2.根据权利要求1所述的自走型可变向装置,其特征在于,控制件(31)包括直线导轨(311)、凸轮随动机构(312)和位检测传感器(313);直线导轨(311)的活动端与导向轮一(32)的中轴通过轴承连接,直线导轨(311)活动端的一侧部设置有凸起;凸轮随动机构(312)设置在驱动件(21)靠向所述凸起的一侧且与所述凸起相接触,以推动所述凸起线性往返移动;位检测传感器(313)位于直线导轨(311)靠向所述凸起的侧部两端,用以检测导向轮一(32)的位置情况。
3.根据权利要求2所述的自走型可变向装置,其特征在于,控制件(31)还包括限位块(314)和缓冲块(315);直线导轨(311)的两端设置有限位块(314);缓冲块(315)安装在限位块(314)的内侧。
4.根据权利要求1所述的自走型可变向装置,其特征在于,驱动件(21)包括伺服电机(211)、行星减速器(212)和联轴器(213);伺服电机(211)的输出轴与行星减速器(212)相连,行星减速器(212)水平两侧输出轴朝向所述行走轮(22),行走轮(22)的中轴与所述行星减速器(212)的输出轴通过联轴器(213)相连。
5.根据权利要求4所述的自走型可变向装置,其特征在于,所述行星减速器(212)的顶部连接有支撑板(214),直线导轨(311)和位检测传感器(313)分别安装在支撑板(214)的顶壁和侧壁。
6.根据权利要求5所述的自走型可变向装置,其特征在于,行走轮(22)中轴外周面设有稳固块(215),稳固块(215)与行走轮(22)中轴通过轴承连接,稳固块(215)的顶端与支撑板(214)连接。
7.根据权利要求4所述的自走型可变向装置,其特征在于,连接部件(1)包括底部轴承(11)、连接转轴(12)、支架(13)和取电模块(14);底部轴承(11)设置在连接转轴(12)的尾端外壁,连接转轴(12)的首端与行星减速器(212)相连;支架(13)安装在连接转轴(12)的外周面,支架(13)侧壁且靠向其中一个行走轮(22)处安装有取电模块(14)。
8.根据权利要求7所述的自走型可变向装置,其特征在于,所述连接转轴(12)的外周面连接有固定板(15),所述固定板(15)的四角与导向轮二(16)转动连接,导向轮二(16)的轮外侧与所述搬运轨道的侧壁相接触。
9.一种晶圆盒搬运装置,其包括:
技术总结
本技术提供一种自走型可变向装置、晶圆盒搬运装置。该自走型可变向装置包括连接部件、驱动部件和变向部件。连接部件的尾端与一个晶圆盒运输车相连。驱动部件包括驱动件和行走轮。驱动件的底部与连接部件的首端相连,驱动件水平两侧的输出轴连接有行走轮,行走轮与一个搬运轨道相接触。变向部件包括控制件和导向轮一。控制件设置在驱动件上,以驱动导向轮一线性往返移动。导向轮一与控制件活动连接且位于驱动件的上方,导向轮一的线性移动方向与行走轮的轴线方向相平行。本技术将取电模块、变向部件及驱动部件集为一体,简化结构的同时缩小了体积,动作流程简便,节省空间;满足运行需求的同时也保障了运行的精准度及稳定性。
技术研发人员:宋国庆
受保护的技术使用者:江苏睿新库智能科技有限公司
技术研发日:20230324
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!