一种机器人搬运码垛机构的制作方法
本技术涉及码垛机构,具体为一种机器人搬运码垛机构。
背景技术:
1、码垛机器人机构是机械与计算机程序有机结合的产物,为现代生产提供了更高的生产效率,码垛机器在码垛行业有着相当广泛的应用,码垛机器人大大节省了劳动力,节省空间,码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高。
2、参考公开号为cn218538516u的一种工业机器人搬运码垛机构,其包括移动板,所述移动板上表面一侧固定有控制台,所述移动板上表面远离控制台的一侧开设有滑槽,所述滑槽内部滑动连接有移动座,所述移动座上表面固定有机械臂,所述机械臂末端固定连接有抓手结构,该码垛机构设置有移动板、移动座、机械臂和抓手结构,移动座可以在移动板上表面的滑槽内移动,并由滑槽内的第二电机和单向丝杆驱动,且移动板通过底部的万向轮也可以自由移动,该码垛机构改变了传统的固定安装的方式,使其能应对例如箱体、袋装等不同的产品,对于不同的生产线均适用,因此不需要对每条生产线均匹配安装对应类型的码垛机构,大大降低企业的使用成本,根据上述可知,该码垛机构虽能够较好的对产品进行码垛处理,但其机械臂部位的角度通常呈固定设置,因不便于调节机械臂的角度,进而难以自动化的将不同方向的产品码垛至指定位置,时常困扰着人们。
技术实现思路
1、本实用新型的目的在于提供一种机器人搬运码垛机构,以解决上述背景技术中提出码垛机构虽能够较好的对产品进行码垛处理,但其机械臂部位的角度通常呈固定设置,因不便于调节机械臂的角度,进而难以自动化的将不同方向的产品码垛至指定位置的问题。
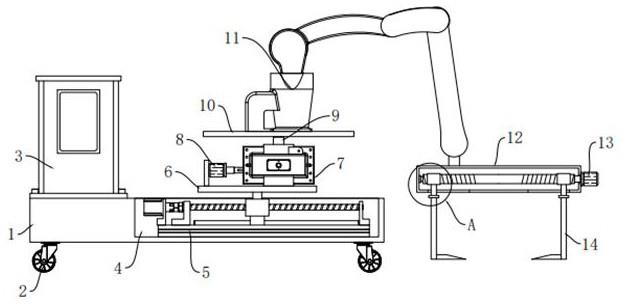
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人搬运码垛机构,包括底座,所述底座顶部的一侧设有置件腔,所述置件腔底部的中心位置处设有置件板,所述置件腔的上方设有下承载座,所述下承载座顶端的一侧设有传动箱,所述传动箱的内部转动连接有蜗轮,所述蜗轮顶端的中心位置处设有立轴,所述立轴的顶端延伸至传动箱的外部并设有上承载座,所述蜗轮一侧的传动箱内部转动连接有蜗杆,所述蜗杆的一端设有导轴,所述导轴远离蜗杆的一端延伸至传动箱的外部,所述下承载座顶端的一侧通过支座安装有第一电机,所述第一电机的一端与导轴的一端固定连接,所述上承载座的顶端设有机械臂,所述机械臂远离上承载座的一端设有传动机体,所述传动机体的内部转动连接有双向丝杆,所述传动机体底部的两侧皆设有限位槽,所述限位槽的底端延伸至传动机体的外部,所述双向丝杆两侧的外壁上皆螺纹连接有螺母,所述螺母底端的中心位置处设有承载杆,所述承载杆的底端贯穿限位槽并设有夹板,所述置件腔一侧的底座顶端设有操控台。
3、优选的,所述底座底端的拐角位置处皆安装有万向轮,所述相邻万向轮关于底座的中心线对称,以便对该码垛机构进行输送转运。
4、优选的,所述置件板的顶端通过支座转动连接有螺旋杆,所述螺旋杆的外壁上螺纹连接有螺旋筒,所述螺旋筒顶端的中心位置处设有承载架,所述承载架的顶端与下承载座的底端固定连接,以便带动下承载座横向移动。
5、优选的,所述传动机体一侧的外壁上安装有第二电机,所述第二电机的一端延伸至传动机体的内部并与双向丝杆的一端固定连接,以便带动双向丝杆进行旋转。
6、优选的,所述螺旋杆下方的置件板顶端设有导轨,所述导轨顶部的一侧滑动连接有轨块,所述轨块的顶端与螺旋筒的底端固定连接,以便对螺旋筒的移动幅度进行限位。
7、优选的,所述螺旋杆一侧的置件板顶端通过支座安装有第三电机,所述第三电机的一端与螺旋杆的一端固定连接,以便带动螺旋杆进行旋转。
8、与现有技术相比,本实用新型的有益效果是:该机器人搬运码垛机构不仅能够自动化将不同方向的产品码垛至指定位置,进而提高了码垛机构的码垛范围,还方便将产品前后码垛至一处,而且能够对不同规格的产品进行夹持码垛,以提升码垛机构的适用范围;
9、通过第一电机经导轴带动蜗杆进行旋转,使得蜗杆带动蜗轮缓慢旋转,以使得蜗轮经立轴带动上承载座缓慢转动,即可调节机械臂的角度,从而能够自动化将不同方向的产品码垛至指定位置,从而提高了码垛机构的码垛范围;
10、通过第三电机带动螺旋杆进行旋转,使得轨块位于导轨的顶部进行滑移,以使其对螺旋筒的移动幅度进行限位,并使得螺旋筒位于螺旋杆的外壁进行滑移,以使得螺旋筒经承载架带动下承载座横向移动,即可带动机械臂横向移动,从而方便将产品前后码垛至一处;
11、通过第二电机带动双向丝杆进行旋转,经限位槽对承载杆的移动幅度进行限位后,使得螺母位于双向丝杆的外壁向中间滑移,以使得螺母经承载杆带动夹板相互靠近,从而能够对不同规格的产品进行夹持码垛,以提升码垛机构的适用范围。
技术特征:
1.一种机器人搬运码垛机构,其特征在于,包括底座(1),所述底座(1)顶部的一侧设有置件腔(4),所述置件腔(4)底部的中心位置处设有置件板(5),所述置件腔(4)的上方设有下承载座(6),所述下承载座(6)顶端的一侧设有传动箱(7),所述传动箱(7)的内部转动连接有蜗轮(25),所述蜗轮(25)顶端的中心位置处设有立轴(9),所述立轴(9)的顶端延伸至传动箱(7)的外部并设有上承载座(10),所述蜗轮(25)一侧的传动箱(7)内部转动连接有蜗杆(26),所述蜗杆(26)的一端设有导轴(27),所述导轴(27)远离蜗杆(26)的一端延伸至传动箱(7)的外部,所述下承载座(6)顶端的一侧通过支座安装有第一电机(8),所述第一电机(8)的一端与导轴(27)的一端固定连接,所述上承载座(10)的顶端设有机械臂(11),所述机械臂(11)远离上承载座(10)的一端设有传动机体(12),所述传动机体(12)的内部转动连接有双向丝杆(15),所述传动机体(12)底部的两侧皆设有限位槽(18),所述限位槽(18)的底端延伸至传动机体(12)的外部,所述双向丝杆(15)两侧的外壁上皆螺纹连接有螺母(16),所述螺母(16)底端的中心位置处设有承载杆(17),所述承载杆(17)的底端贯穿限位槽(18)并设有夹板(14),所述置件腔(4)一侧的底座(1)顶端设有操控台(3)。
2.根据权利要求1所述的一种机器人搬运码垛机构,其特征在于:所述底座(1)底端的拐角位置处皆安装有万向轮(2),相邻万向轮(2)关于底座(1)的中心线对称。
3.根据权利要求1所述的一种机器人搬运码垛机构,其特征在于:所述置件板(5)的顶端通过支座转动连接有螺旋杆(24),所述螺旋杆(24)的外壁上螺纹连接有螺旋筒(22),所述螺旋筒(22)顶端的中心位置处设有承载架(23),所述承载架(23)的顶端与下承载座(6)的底端固定连接。
4.根据权利要求1所述的一种机器人搬运码垛机构,其特征在于:所述传动机体(12)一侧的外壁上安装有第二电机(13),所述第二电机(13)的一端延伸至传动机体(12)的内部并与双向丝杆(15)的一端固定连接。
5.根据权利要求3所述的一种机器人搬运码垛机构,其特征在于:所述螺旋杆(24)下方的置件板(5)顶端设有导轨(20),所述导轨(20)顶部的一侧滑动连接有轨块(21),所述轨块(21)的顶端与螺旋筒(22)的底端固定连接。
6.根据权利要求3所述的一种机器人搬运码垛机构,其特征在于:所述螺旋杆(24)一侧的置件板(5)顶端通过支座安装有第三电机(19),所述第三电机(19)的一端与螺旋杆(24)的一端固定连接。
技术总结
本技术公开了一种机器人搬运码垛机构,包括底座,底座顶部的一侧设有置件腔,置件腔底部的中心位置处设有置件板,置件腔的上方设有下承载座,下承载座顶端的一侧设有传动箱,传动箱的内部转动连接有蜗轮,蜗轮顶端的中心位置处设有立轴,立轴的顶端延伸至传动箱的外部并设有上承载座,蜗轮一侧的传动箱内部转动连接有蜗杆,蜗杆的一端设有导轴,下承载座顶端的一侧通过支座安装有第一电机,上承载座的顶端设有机械臂。本技术不仅能够自动化将不同方向的产品码垛至指定位置,进而提高了码垛机构的码垛范围,还方便将产品前后码垛至一处,而且能够对不同规格的产品进行夹持码垛,以提升码垛机构的适用范围。
技术研发人员:贾美娟,王跃林,安江伟,杜学强
受保护的技术使用者:唐山阿诺达自动化有限公司
技术研发日:20230407
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!