基于机械手的肠类食品夹具的制作方法
本技术涉及食品加工,尤其涉及基于机械手的肠类食品夹具。
背景技术:
1、目前,在一些香肠自动化包装生产线中,香肠被带定位槽的传输带运输到包装机所在位置后,需要使用机械臂通过香肠夹具把一定数量的香肠转移到包装机中进行包装。
2、现有的技术存在以下问题:
3、经大量检索后发现在,中国专利公开号:cn210284758u公开了一种可变位可变量易拆换香肠夹具,包括用于与机械臂连接的连接架,以及与连接架连接的顶座;顶座上设置有管接口;顶座内设置有第一内腔和至少一个第二内腔,其中第一内腔与所述管接口连通,第一内腔和第二内腔的下侧均设置有若干个吸盘,所述吸盘与对应的第一内腔或第二内腔连通;第一内腔和第二内腔之间设置有连通通道,对应每个连通通道设置有一个用于控制该连通通道开闭的开关机构,该专利通过开关机构关闭对应的连通通道,可使相应的第二内腔封闭,从而使与该第二内腔连通的吸盘停止工作,因此,可不更换部件即可实现工作的吸盘数量的在线调节,有利于降低设备配置成本。
4、然而在实际使用过程中还存在一定的问题,较为明显的是采用吸盘来对香肠进行夹持的方式,不便于对不同规格的单根香肠进行夹持的问题。
5、我们为此,提出了基于机械手的肠类食品夹具解决上述弊端。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点而提出的基于机械手的肠类食品夹具。
2、为了实现上述目的,本实用新型采用了如下技术方案:基于机械手的肠类食品夹具,包括支撑座,所述支撑座的顶面一体化设置有连接块,且连接块的一端安装有机械手连接座,并且机械手连接座通过螺栓与机械手连接,所述支撑座的底面等距固定安装有固定臂,所述支撑座的表面通过中心杆等距转动连接有活动臂,且活动臂与固定臂的内壁均粘接有防护垫,所述活动臂的一端安装有第一齿轮,所述支撑座的表面转动连接有第二齿轮,且第二齿轮与第一齿轮啮合,所述第二齿轮的顶面焊接蜗轮,所述支撑座的外壁安装有电动机,且电动机的输出端安装有蜗杆,并且蜗杆与蜗轮啮合,所述活动臂与支撑座之间安装有复位弹簧。
3、优选的,所述活动臂和固定臂均设有多个,且一个所述活动臂和一个所述固定臂组成一个夹具。
4、优选的,所述防护垫的材质为硅胶,且防护垫的直径小于固定臂的直径。
5、优选的,所述电动机设有多个,且多个电动机的输入端通过导线与外部机械手电性连接。
6、优选的,所述活动臂和固定臂均为弧形结构,且固定臂和活动臂的直径相同。
7、优选的,所述支撑座的材质为铝合金,且支撑座的宽度小于活动臂的宽度。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型中通过设置活动臂和固定臂,电动机驱动蜗杆顺时针旋转,蜗杆旋转带动蜗轮旋转,蜗轮旋转带动第二齿轮进行旋转,从而与第二齿轮啮合的第一齿轮跟随旋转,使活动臂以中心杆为圆心进行弧形运动并逐渐向固定臂靠近,从而能够对不同规格的香肠进行夹持,反之活动臂复位能够将香肠放下等待下次夹持作业,适用范围更加的广泛,实用性强,值得推广。
10、2、本实用新型中通过设置防护垫,能够极大的降低固定臂和活动臂对香肠造成的损伤,避免香肠被固定臂和活动臂所夹伤,保证香肠的美观性,结构简单,实用性强。
技术特征:
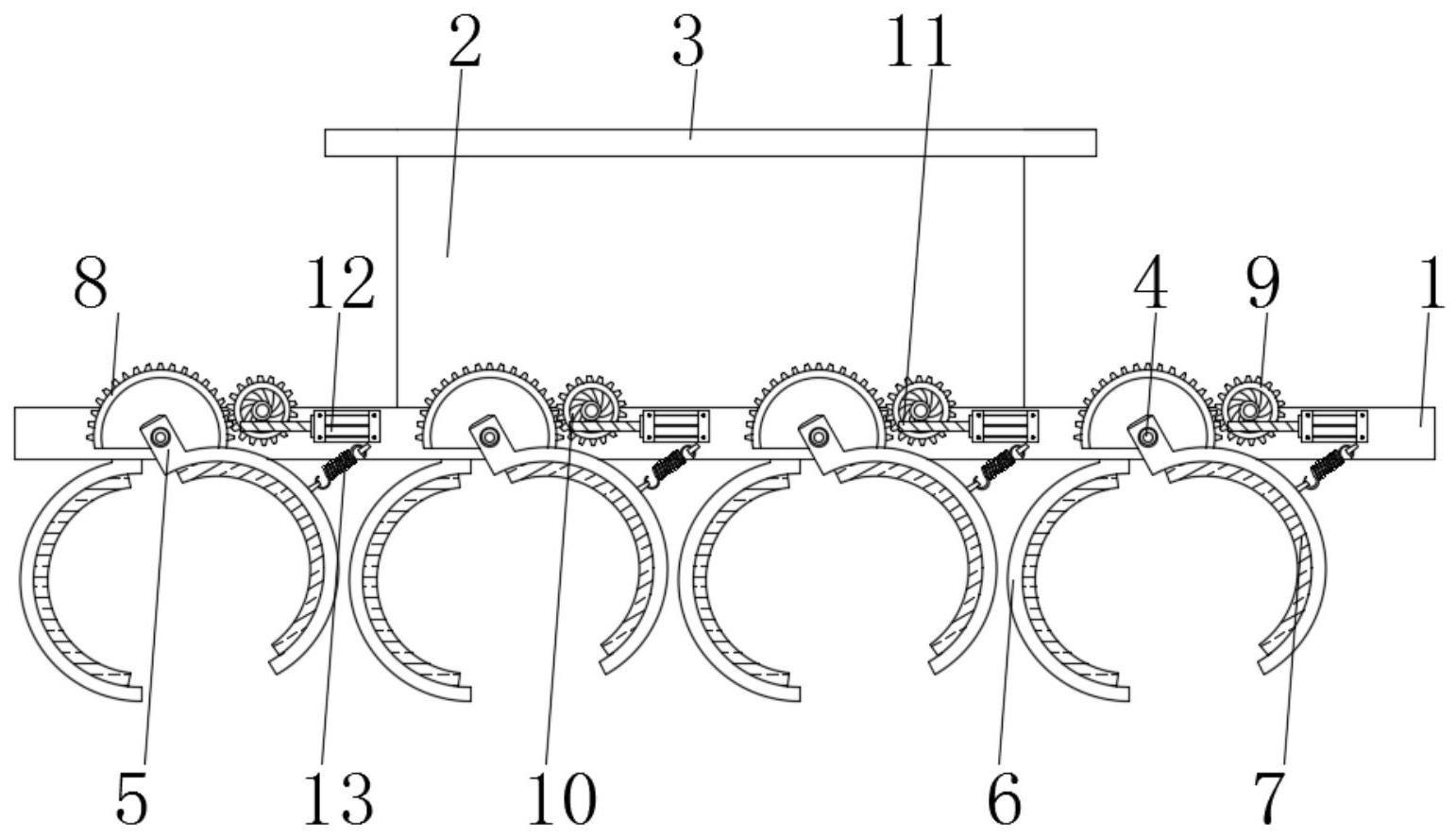
1.基于机械手的肠类食品夹具,包括支撑座(1),其特征在于,所述支撑座(1)的顶面一体化设置有连接块(2),且连接块(2)的一端安装有机械手连接座(3),并且机械手连接座(3)通过螺栓与机械手连接,所述支撑座(1)的底面等距固定安装有固定臂(6),所述支撑座(1)的表面通过中心杆(4)等距转动连接有活动臂(5),且活动臂(5)与固定臂(6)的内壁均粘接有防护垫(7),所述活动臂(5)的一端安装有第一齿轮(8),所述支撑座(1)的表面转动连接有第二齿轮(9),且第二齿轮(9)与第一齿轮(8)啮合,所述第二齿轮(9)的顶面焊接蜗轮(10),所述支撑座(1)的外壁安装有电动机(12),且电动机(12)的输出端安装有蜗杆(11),并且蜗杆(11)与蜗轮(10)啮合,所述活动臂(5)与支撑座(1)之间安装有复位弹簧(13)。
2.根据权利要求1所述的基于机械手的肠类食品夹具,其特征在于,所述活动臂(5)和固定臂(6)均设有多个,且一个所述活动臂(5)和一个所述固定臂(6)组成一个夹具。
3.根据权利要求1所述的基于机械手的肠类食品夹具,其特征在于,所述防护垫(7)的材质为硅胶,且防护垫(7)的直径小于固定臂(6)的直径。
4.根据权利要求1所述的基于机械手的肠类食品夹具,其特征在于,所述电动机(12)设有多个,且多个电动机(12)的输入端通过导线与外部机械手电性连接。
5.根据权利要求1所述的基于机械手的肠类食品夹具,其特征在于,所述活动臂(5)和固定臂(6)均为弧形结构,且固定臂(6)和活动臂(5)的直径相同。
6.根据权利要求1所述的基于机械手的肠类食品夹具,其特征在于,所述支撑座(1)的材质为铝合金,且支撑座(1)的宽度小于活动臂(5)的宽度。
技术总结
本技术公开了基于机械手的肠类食品夹具,包括支撑座,所述支撑座的顶面一体化设置有连接块,且连接块的一端安装有机械手连接座,并且机械手连接座通过螺栓与机械手连接,所述支撑座的底面等距固定安装有固定臂,所述支撑座的表面通过中心杆等距转动连接有活动臂,且活动臂与固定臂的内壁均粘接有防护垫。本技术中,电动机驱动蜗杆顺时针旋转,蜗杆旋转带动蜗轮旋转,蜗轮旋转带动第二齿轮进行旋转,从而与第二齿轮啮合的第一齿轮跟随旋转,使活动臂以中心杆为圆心进行弧形运动并逐渐向固定臂靠近,从而能够对不同规格的香肠进行夹持,反之活动臂复位能够将香肠放下等待下次夹持作业,适用范围更加的广泛,实用性强,值得推广。
技术研发人员:李森,曹佳男
受保护的技术使用者:河南佳怡食品有限公司
技术研发日:20230407
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!