一种半自动化门型机构搬送装置的制作方法
本技术涉及汽车零部件输送,尤其涉及一种半自动化门型机构搬送装置。
背景技术:
1、部品箱配送距离远,重量大,且空间狭窄,部品箱在狭窄空间长距离移动,滑道倾斜角角度太小,部品箱重量大,滑动缓慢,无法使用纯无动力机构装置。使用大量气缸和电机通过编程制作的搬送装置高能耗,维护成本高,机构原理以及程序操作复杂点检维护困难。如果采用人工配送,则存在严重的作业干涉,影响安全生产,人工作业存在大量等待浪费导致劳动生产效率低下。
技术实现思路
1、为克服相关技术中存在的问题,本实用新型公开实施例提供了一种半自动化门型机构搬送装置。所述技术方案如下:
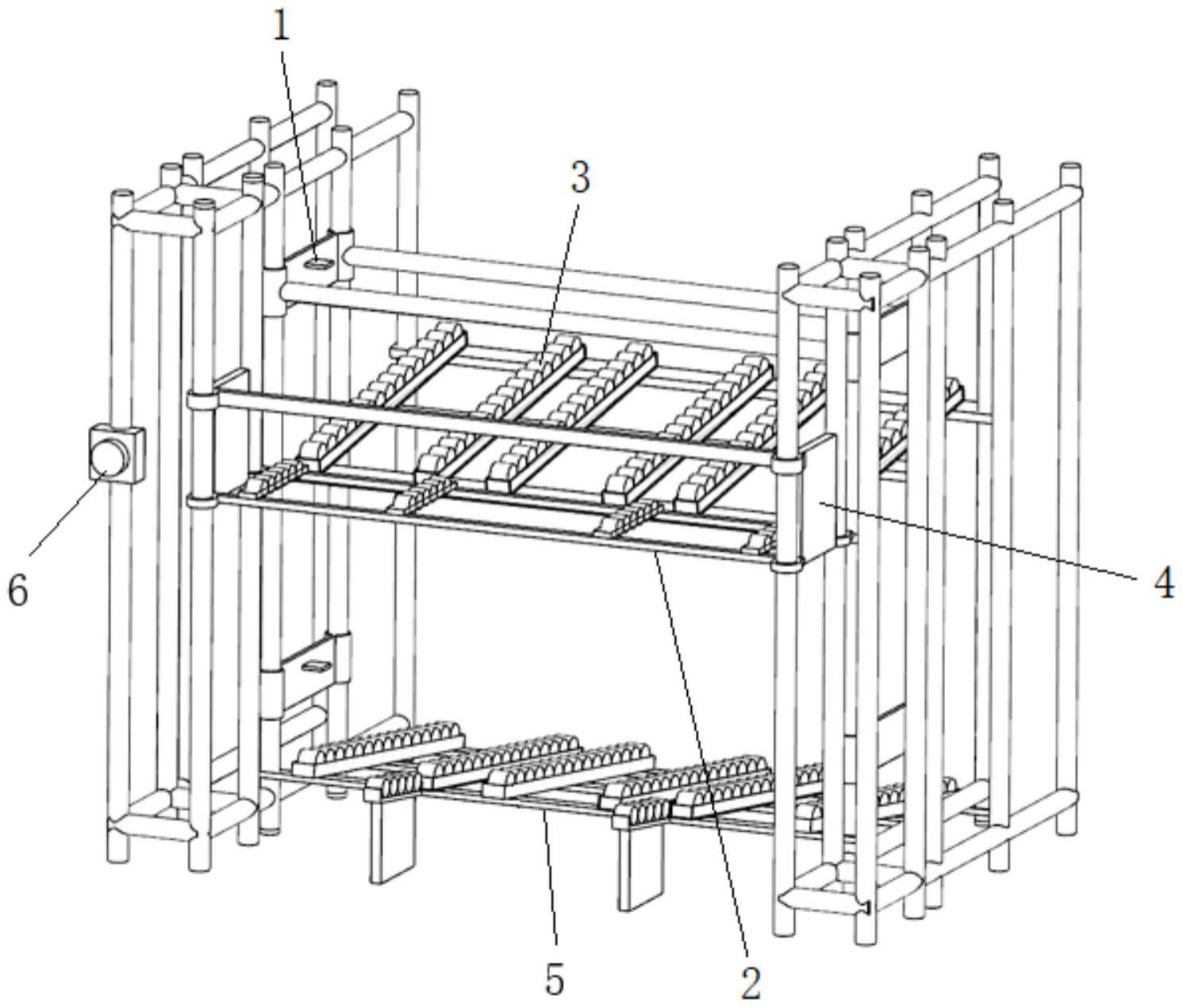
2、根据本实用新型公开实施例的第一方面,提供一种半自动化门型机构搬送装置,设置有:
3、限位机构,用于获取门型设备下行动作触碰信息后,发出使上层空部品箱流出,同时有货的部品箱流入下层门型设备料框里的指令;
4、上行料框,用于触碰门型桥限位机构,使部品箱流入门型桥,同时空部品箱从门型桥流入上层料框设备;
5、电动滚筒,用于把部品箱送到线侧门型桥口;
6、上行线侧门型设备,用于触碰线侧门限位机构使有货部品箱流入线侧设备料框中,同时空部品箱流入上层门型桥中;
7、下行料框,用于使有货部品箱流入作业区域,空箱返回过程中同样利用电动滚筒使部品箱流入门型桥口;
8、控制器,与限位机构、上行料框、电动滚筒、门型桥限位机构、上行线侧门型设备、线侧门限位机构、下行料框连接,用于发出控制指令并控制执行动作。
9、在一个实施例中,所述限位机构安装在部品箱之间以及双层料框设备进出口处。
10、在一个实施例中,通过机械原理组合在部品箱之间以及双层料框设备进出口处安装限位机构。
11、在一个实施例中,通过编程控制门型设备下行动作触碰限位机构。
12、本实用新型公开的实施例提供的技术方案可以包括以下有益效果:
13、本发明半自动化门型机构搬送,消除动作浪费和运搬浪费提升劳动效率;使用机械原理和半自动化机构设备实现高效率运搬同时提高机构的可靠性,作业员可以进行一般的日常点检维护。
14、当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种半自动化门型机构搬送装置,其特征在于,所述半自动化门型机构搬送装置设置有:
2.根据权利要求1所述的半自动化门型机构搬送装置,其特征在于,所述限位机构(1)安装在部品箱之间以及双层料框设备进出口处。
3.根据权利要求1所述的半自动化门型机构搬送装置,其特征在于,通过机械原理组合在部品箱之间以及双层料框设备进出口处安装限位机构(1)。
4.根据权利要求1所述的半自动化门型机构搬送装置,其特征在于,通过编程控制门型设备下行动作触碰限位机构(1)。
技术总结
本技术公开一种半自动化门型机构搬送装置,涉及汽车零部件输送技术领域。门型设备下行动作触碰限位机构,使上层空部品箱流出,将有货的部品箱流入下层门型设备料框;上行料框触碰门型桥限位机构,再使有货的部品箱流入门型桥,同时空部品箱从门型桥流入上层料框设备;再通过电动滚筒把有货的部品箱送到线侧门型桥口,通过上行线侧门型设备触碰线侧门限位机构使有货的部品箱流入线侧设备料框中,同时空部品箱流入上层门型桥中;下行料框使有货的部品箱流入作业区域,空部品箱返回过程中同样利用电动滚筒使空部品箱流入门型桥口。本技术半自动化门型机构搬送,消除动作浪费和运搬浪费提升劳动效率。
技术研发人员:张磊,钟刚
受保护的技术使用者:一汽丰田汽车有限公司
技术研发日:20230411
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!