一种左右气缸协同工作的豆腐转移装置的制作方法
本技术涉及机械转移装置,具体为一种左右气缸协同工作的豆腐转移装置。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,进行物品快速转移,减少劳动强度以及人力机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、电子、轻工业和原子能等部门。
2、如申请号为cn202123362933.x,公开了一机械臂及其夹臂以及应用有机械臂的样品管转移装置,其中所述夹臂包括一横向延伸的夹板、自所述夹板向下延伸的一夹爪以及自所述夹板向上延伸的一安装元件,其中当两个所述夹臂被相对设置时,两个所述夹臂的所述夹板之间能够形成一管架空间,和两个所述夹臂的所述夹爪之间能够形成一样品管空间,如此所述机械臂既能够被用于夹持一个样品管,又能够被夹持一个管架,与现有的豆腐转移装置,但是对抓取效果不具有气缸磁性吸附效果以及不能方便移动。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出一种左右气缸协同工作的豆腐转移装置。
技术实现思路
1、本实用新型的目的在于提供一种左右气缸协同工作的豆腐转移装置,以解决上述背景技术中提出的问题。
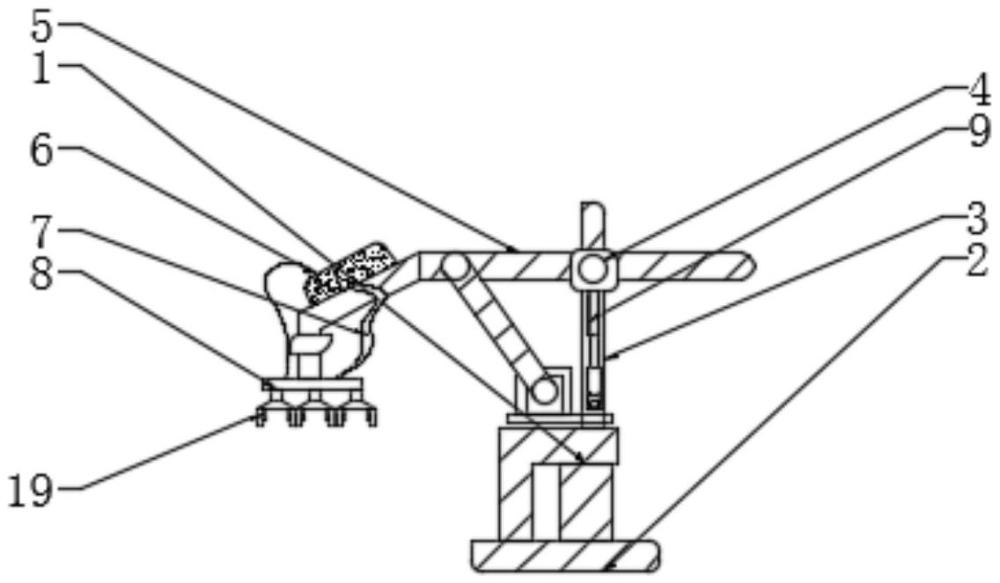
2、为实现上述目的,本实用新型提供如下技术方案:一种左右气缸协同工作的豆腐转移装置,包括豆腐转移装置主体,所述豆腐转移装置主体的表面一端设置有吸附装置,且吸附装置的下方壁端设置有缓冲吸盘,所述吸附装置的内部设置有磁力传感器,且缓冲吸盘的上端内部设置有电磁导线,所述吸附装置的内部设置有电磁聚合导体,且电磁聚合导体与电磁导线磁性连接,所述豆腐转移装置主体的下方设置有置物板,且置物板的表面两侧开设有卡槽,所述卡槽的下方设置有顶杆,且顶杆的内部设置有减震弹簧。
3、进一步的,所述豆腐转移装置主体的表面底端设置有底座,且底座的上端设置有转盘,且转盘通过转轴与底座旋转连接。
4、进一步的,所述转盘的表面上端穿设有第一机械臂,且第一机械臂的内部设置有伸缩杆,且伸缩杆与底座固定连接。
5、进一步的,所述第一机械臂的表面连接处设置有旋转装置,且旋转装置的表面一侧设置有第二机械臂,且第二机械臂的表面上方设置有气缸,所述吸附装置的上方均穿设有吸压管,且吸压管与气缸固定连接。
6、进一步的,所述底座的内部设置有旋转电机,且旋转电机的表面一端设置有转杆。
7、进一步的,所述旋转电机的表面一侧设置有散热风扇,且底座的表面开设有散热口。
8、进一步的,所述底座的表面底端设置有万向轮,万向轮通过螺栓与底座螺纹连接。
9、与现有技术相比,本实用新型的有益效果是:
10、1.本实用新型通过吸附装置、电磁导线、电磁聚合导体和磁力传感器的设置,通过电磁吸附装置能够对含铁的待转运物品进行转运,由于部分含铁物品表面并不光滑,而无法使用气缸吸附来对其进行运转,通过采用吸附装置来对其进行装运操作,通过吸附装置在电磁吸附的过程中起到缓冲的作用,避免在运输过程中待转运豆腐的表面受受到损伤,通过磁力传感器的设计是为了通过检测磁力大小,从而控制磁力电源中电流的大小,使其达到避免物品在运转过程中掉落;
11、2.本实用新型通过缓冲吸盘、第一机械臂、第二机械臂、旋转装置、伸缩杆和转盘的设置,通过第一机械臂或者伸缩杆相对整体进行旋转,第一机械臂下端相对转盘旋转时,可带动悬臂相对竖直滑杆进行运动,该运动包括竖向的升降运动,还包括横向伸出和收回的运动,缓冲吸盘连接负压装置可通过负压豆腐,从而可实现取豆腐食品的基本操作;安装缓冲吸盘时,缓冲吸盘之间可呈角度与悬臂进行固定,从而达到更好吸附效果,便于组装和拆卸;
12、3.本实用新型通过万向轮和减震弹簧的设置,万向轮通过阻力杆与机体之间构成连接结构,通过减震弹簧对豆腐转移装置缓冲,减震弹簧将震动转变为弹性势能储存,通过阻尼杆对减震弹簧的弹性势能进行削减,避免豆腐转移装置移动过程中受到震动,放置豆腐转移装置移动时震动过大,导致内部电器元件受损,从而提高豆腐转移装置在移动时提高缓冲效果。
技术特征:
1.一种左右气缸协同工作的豆腐转移装置,包括豆腐转移装置主体(1),其特征在于,所述豆腐转移装置主体(1)的表面一端设置有吸附装置(8),且吸附装置(8)的下方壁端设置有缓冲吸盘(16),所述吸附装置(8)的内部设置有磁力传感器(19),且缓冲吸盘(16)的上端内部设置有电磁导线(17),所述吸附装置(8)的内部设置有电磁聚合导体(18),且电磁聚合导体(18)与电磁导线(17)磁性连接,所述豆腐转移装置主体(1)的下方设置有置物板(23),且置物板(23)的表面两侧开设有卡槽(20),所述卡槽(20)的下方设置有顶杆(21),且顶杆(21)的内部设置有减震弹簧(22)。
2.根据权利要求1所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述豆腐转移装置主体(1)的表面底端设置有底座(2),且底座(2)的上端设置有转盘(10),且转盘(10)通过转轴与底座(2)旋转连接。
3.根据权利要求2所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述转盘(10)的表面上端穿设有第一机械臂(3),且第一机械臂(3)的内部设置有伸缩杆(9),且伸缩杆(9)与底座(2)固定连接。
4.根据权利要求3所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述第一机械臂(3)的表面连接处设置有旋转装置(4),且旋转装置(4)的表面一侧设置有第二机械臂(5),且第二机械臂(5)的表面上方设置有气缸(6),所述吸附装置(8)的上方均穿设有吸压管(7),且吸压管(7)与气缸(6)固定连接。
5.根据权利要求2所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述底座(2)的内部设置有旋转电机(11),且旋转电机(11)的表面一端设置有转杆(14)。
6.根据权利要求5所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述旋转电机(11)的表面一侧设置有散热风扇(12),且底座(2)的表面开设有散热口(13)。
7.根据权利要求2所述的一种左右气缸协同工作的豆腐转移装置,其特征在于,所述底座(2)的表面底端设置有万向轮(15),万向轮(15)通过螺栓与底座(2)螺纹连接。
技术总结
本技术公开了一种左右气缸协同工作的豆腐转移装置,涉及机械转移装置技术领域,包括豆腐转移装置主体所述豆腐转移装置主体的表面一端设置有吸附装置,且吸附装置的下方壁端设置有缓冲吸盘,所述吸附装置的内部设置有磁力传感器,且缓冲吸盘的上端内部设置有电磁导线,所述吸附装置的内部设置有电磁聚合导体,且电磁聚合导体与电磁导线磁性连接,所述豆腐转移装置主体的下方设置有置物板,且置物板的表面两侧开设有卡槽,与现有的普通转移装置相比,避免在运输过程中待转运豆腐的表面受受到损伤,通过磁力传感器的设计是为了通过检测磁力大小,从而控制磁力电源中电流的大小,使其达到避免物品在运转过程中掉落。
技术研发人员:胡明秋
受保护的技术使用者:湖南忆湘食品有限公司
技术研发日:20230411
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!