幕墙单元板块金属构件框的自动翻转搬运系统的制作方法
本技术涉及建筑幕墙加工,尤其涉及一种幕墙单元板块金属构件框的自动翻转搬运系统。
背景技术:
1、当前,单元式幕墙现场安装简便快速,工程施工周期短,越来越多地应用于现代大型和高层建筑中。随着单元式幕墙的需求增多,对幕墙单元板块生产、制造和组装效率提出更高要求。以组装工序为例,幕墙单元板块的金属构件框尺寸较大、重量较重,操作人员在对幕墙单元板块组装作业时,需要耗费很大力气才能将幕墙单元板块翻转和搬运过来,不仅人工劳动强度高,而且组装人均效率低,同时存在潜在作业安全隐患。
技术实现思路
1、本实用新型的目的是提供一种幕墙单元板块金属构件框的自动翻转搬运系统,用于解决上述现有技术中建筑幕墙单元板块的金属构件框翻转搬运过程中人工劳动强度大、组装人均效率低以及人员作业安全等问题。
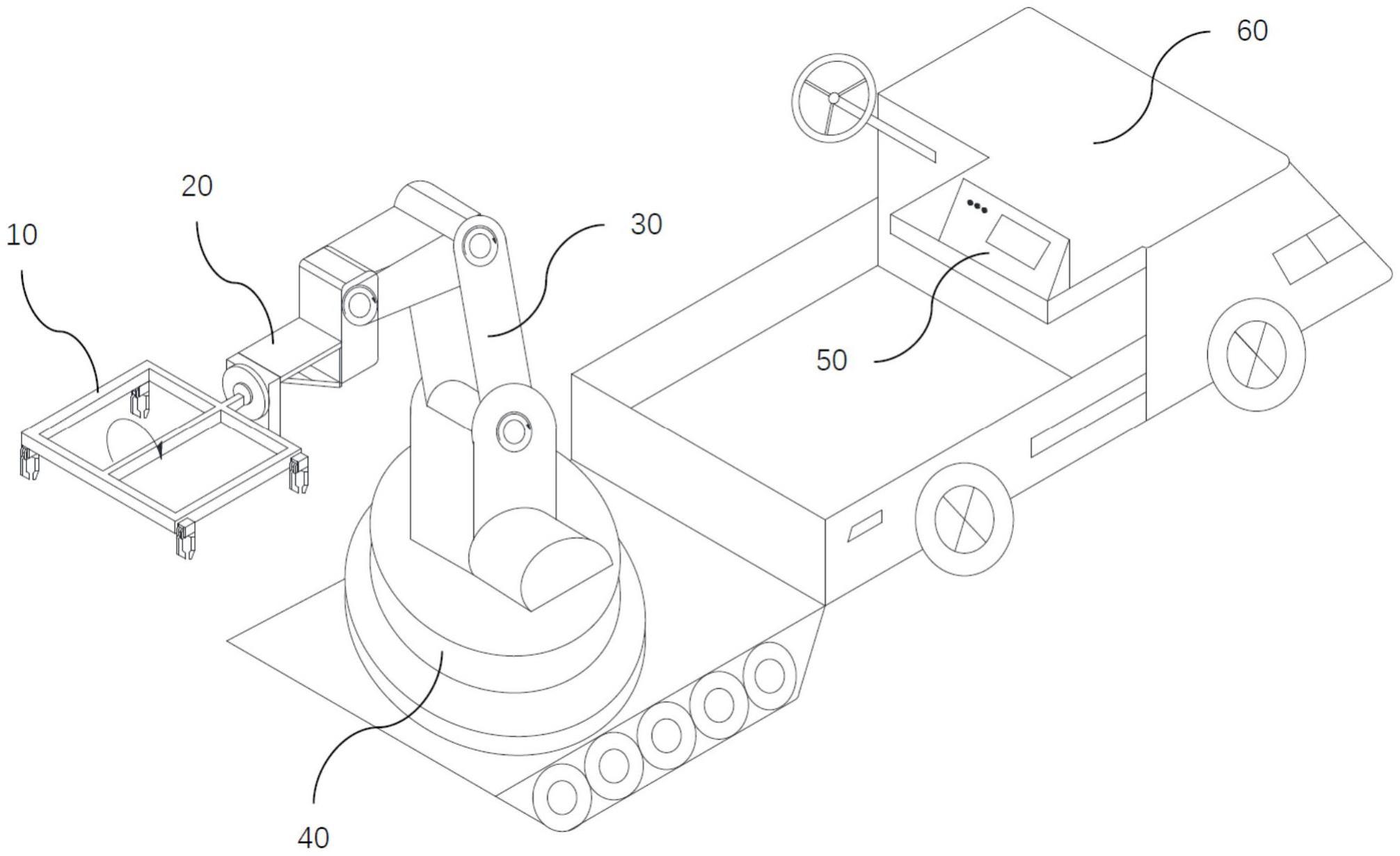
2、本实用新型的幕墙单元板块金属构件框的自动翻转搬运系统,包括夹料翻转装置、升降旋转装置和电控运输装置,夹料翻转装置固定连接于升降旋转装置上,升降旋转装置设置于电控运输装置上;夹料翻转装置包括抓料机构和翻转机构,抓料机构设置于翻转机构上,用于抓取或松开幕墙单元板块金属构件框,翻转机构用于将抓料机构及其夹紧的幕墙单元板块金属构件框翻转至预设水平位置;升降旋转装置包括升降伸缩机构和旋转机构,升降伸缩机构一端固定连接于翻转机构上,另一端固定连接于旋转机构上,用于将夹料翻转装置提升至预设安全高度或下降至卸货货架上,旋转机构用于将夹料翻转装置平面旋转至预设旋转位置;电控运输装置包括电控单元和运输工具,电控单元设置于运输工具上,并分别与抓料机构、翻转机构、升降伸缩机构和旋转机构电气连接,运输工具用于将金属构件框从堆放区运送至组装卸货区。
3、在一种可能的具体实施方式中,抓料机构包括第一驱动装置、夹爪和支架,第一驱动装置与电控单元电气连接,第一驱动装置与夹爪驱动连接,夹爪与支架固定连接,在第一驱动装置的驱动下,夹爪具有夹紧位置和松开位置。
4、在一种可能的具体实施方式中,第一驱动装置为第一电动机,抓料机构还包括同步带和推杆结构,第一电动机带动同步带转动,同步带驱动推杆结构,使夹爪处于夹紧位置或松开位置。
5、在一种可能的具体实施方式中,支架为日字型支架,夹爪的数量不少于4个,支架的四角位置至少设置有1个夹爪。
6、在一种可能的具体实施方式中,翻转机构为180度翻转工作台,180度翻转工作台包括第二驱动装置和主转盘安装台,第二驱动装置与电控单元电气连接,主转盘安装台的一侧与抓料机构固定连接,另一侧与第二驱动装置驱动连接。
7、在一种可能的具体实施方式中,第二驱动装置包括第二电动机、行星减速机、主齿轮、传动齿轮和机箱壳,主齿轮和传动齿轮设置于机箱壳内,第二电动机安装有行星减速机,并通过联轴器驱动主齿轮,主齿轮带动传动齿轮调整转速增加力矩,传动齿轮与主转盘安装台驱动连接。
8、在一种可能的具体实施方式中,升降伸缩机构为三轴机械臂,三轴机械臂的末端与翻转机构固定连接,三轴机械臂的底座与旋转机构固定连接。
9、在一种可能的具体实施方式中,旋转机构为270度旋转工作台,270度旋转工作台包括第三驱动装置和主旋转安装台,第三驱动装置与电控单元电气连接,用于驱动主旋转安装台270度旋转。
10、在一种可能的具体实施方式中,运输工具为运输车工作台,运输车工作台的操作区设置有电控单元,运输车工作台的运载区固定设置有升降旋转装置。
11、在一种可能的具体实施方式中,运输车工作台为新能源电控运输工具车。
12、有益技术效果:本实用新型的幕墙单元板块金属构件框的自动翻转搬运系统,通过电控单元的系列控制,抓料机构抓取金属构件框,升降伸缩机构通过升降和收缩动作将金属构件框提升至预设安全高度,运输工具将金属构件框运输至组装卸货区,翻转机构将金属构件框翻转至预设水平位置,旋转机构将金属构件框平面旋转至预设卸货位置,升降伸缩机构将金属构件框下降至卸货货架上,抓料机构松开金属构件框,完成一次全工序作业。整个作业工序过程,单人操作机台即可完成幕墙单元板块金属框构件的抓取、升降、收缩、运输、翻转、送料等系列搬运操作,大幅度地减少流水线式人工搬运劳动,在保障操作人员安全、舒适、高效工作的同时,提高了幕墙单元板块金属框构件自动化生产水平。
技术特征:
1.一种幕墙单元板块金属构件框的自动翻转搬运系统,其特征在于,所述系统包括夹料翻转装置、升降旋转装置和电控运输装置,所述夹料翻转装置固定连接于所述升降旋转装置上,所述升降旋转装置设置于所述电控运输装置上;
2.根据权利要求1所述的自动翻转搬运系统,其特征在于,所述抓料机构包括第一驱动装置、夹爪和支架,所述第一驱动装置与所述电控单元电气连接,所述第一驱动装置与所述夹爪驱动连接,所述夹爪与所述支架固定连接,在所述第一驱动装置的驱动下,所述夹爪具有夹紧位置和松开位置。
3.根据权利要求2所述的自动翻转搬运系统,其特征在于,所述第一驱动装置为第一电动机,所述抓料机构还包括同步带和推杆结构,所述第一电动机带动所述同步带转动,所述同步带驱动所述推杆结构,使所述夹爪处于夹紧位置或松开位置。
4.根据权利要求2所述的自动翻转搬运系统,其特征在于,所述支架为日字型支架,所述夹爪的数量不少于4个,所述支架的四角位置至少设置有1个所述夹爪。
5.根据权利要求1所述的自动翻转搬运系统,其特征在于,所述翻转机构为180度翻转工作台,所述180度翻转工作台包括第二驱动装置和主转盘安装台,所述第二驱动装置与所述电控单元电气连接,所述主转盘安装台的一侧与所述抓料机构固定连接,另一侧与所述第二驱动装置驱动连接。
6.根据权利要求5所述的自动翻转搬运系统,其特征在于,所述第二驱动装置包括第二电动机、行星减速机、主齿轮、传动齿轮和机箱壳,所述主齿轮和所述传动齿轮设置于所述机箱壳内,所述第二电动机安装有所述行星减速机,并通过联轴器驱动所述主齿轮,所述主齿轮带动所述传动齿轮调整转速增加力矩,所述传动齿轮与所述主转盘安装台驱动连接。
7.根据权利要求1所述的自动翻转搬运系统,其特征在于,所述升降伸缩机构为三轴机械臂,所述三轴机械臂的末端与所述翻转机构固定连接,所述三轴机械臂的底座与所述旋转机构固定连接。
8.根据权利要求1所述的自动翻转搬运系统,其特征在于,所述旋转机构为270度旋转工作台,所述270度旋转工作台包括第三驱动装置和主旋转安装台,所述第三驱动装置与所述电控单元电气连接,用于驱动所述主旋转安装台270度旋转。
9.根据权利要求1-8任一项中所述的自动翻转搬运系统,其特征在于,所述运输工具为运输车工作台,所述运输车工作台的操作区设置有所述电控单元,所述运输车工作台的运载区固定设置有所述升降旋转装置。
10.根据权利要求9所述的自动翻转搬运系统,其特征在于,所述运输车工作台为新能源电控运输工具车。
技术总结
本技术的幕墙单元板块金属构件框的自动翻转搬运系统,通过电控单元的系列控制,抓料机构抓取金属构件框,升降伸缩机构将金属构件框提升至预设安全高度,运输工具将金属构件框运输至组装卸货区,翻转机构将金属构件框翻转至预设水平位置,旋转机构将金属构件框平面旋转至预设卸货位置,升降伸缩机构将金属构件框下降至卸货货架上,抓料机构松开金属构件框,完成一次全工序作业。整个作业工序过程,单人操作机台即可完成幕墙单元板块金属框构件的抓取、升降、收缩、运输、翻转、送料等系列搬运操作,大幅度地减少流水线式人工搬运劳动,在保障操作人员安全、舒适、高效工作的同时,提高了幕墙单元板块金属框构件自动化生产水平。
技术研发人员:张涛,李宁,梁炳强,邓伟光,付财坤
受保护的技术使用者:珠海兴业节能科技有限公司
技术研发日:20230417
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!