手指结构、货叉组件及搬运机器人的制作方法
本申请涉及物流运输,尤其涉及一种手指结构、货叉组件及搬运机器人。
背景技术:
1、搬运机器人广泛应用于工厂等物流场景中,货叉是料箱机器人中的核心部件。目前,货叉上的手指多为固定式的,不具有调节功能,对于斜插箱而言,固定式的手指与斜插箱接触面为手指边线,接触面积小,容易压坏料箱,同时手指受力沿其中心面不对称,产生了额外的转矩,加速了手指断裂。
技术实现思路
1、本申请的目的在于提供一种手指结构、货叉组件及搬运机器人,以解决上述现有技术中固定式手指与斜插箱接触面小,容易压坏料箱或造成手指断裂的问题。
2、本申请的第一方面提供了一种手指结构,其中,包括:
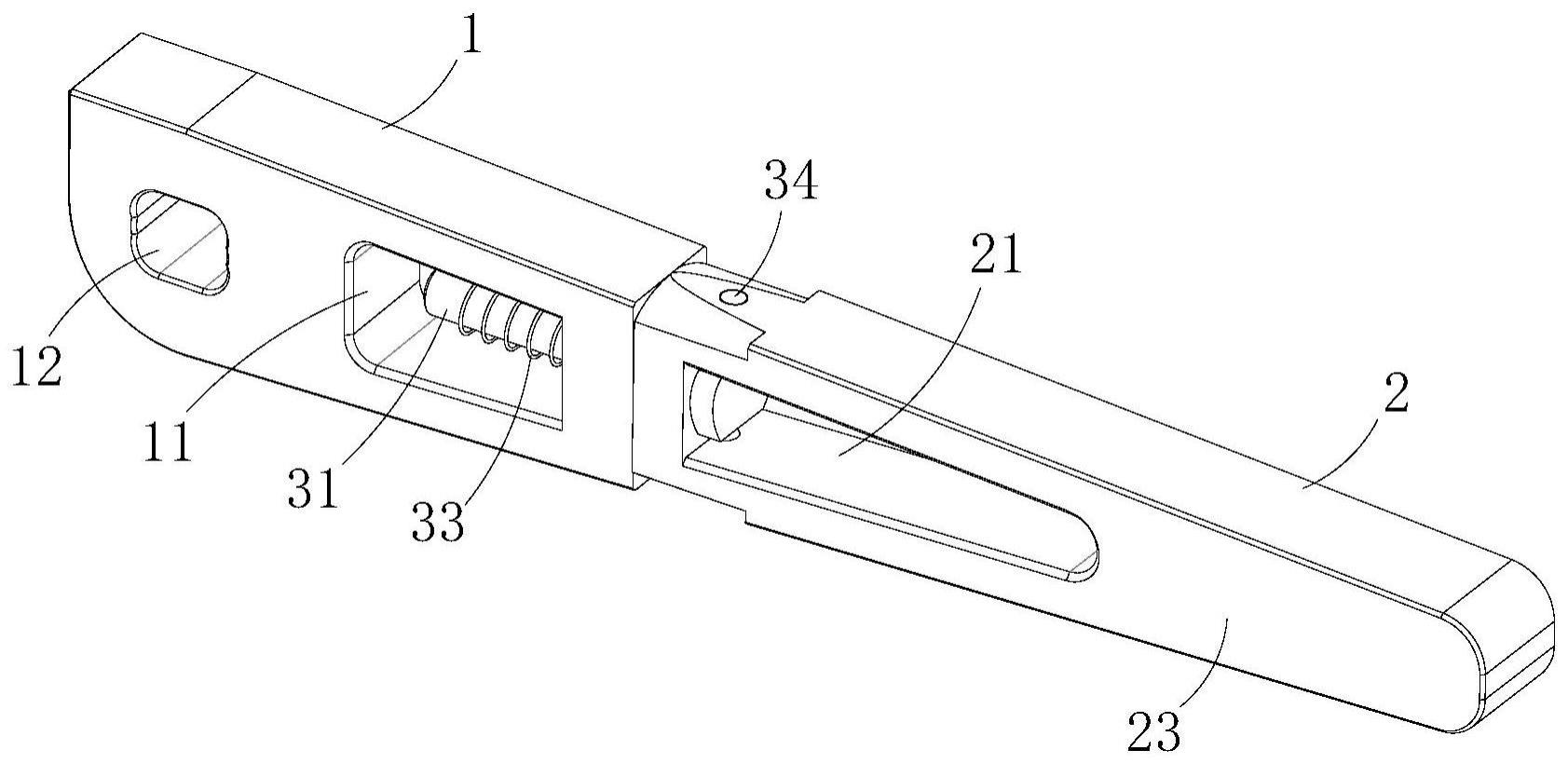
3、第一本体,用于与货叉组件中的驱动机构连接;
4、第二本体,用于夹持料箱;
5、转动组件,所述转动组件的一端与所述第一本体和所述第二本体中的一者固定连接,所述转动组件的另一端与所述第一本体和所述第二本体中的另一者转动连接。
6、在一种可能的设计中,所述转动组件包括销轴和轴承,所述轴承安装于所述第一本体,所述销轴通过所述轴承与所述第一本体转动连接;
7、所述销轴上远离所述第一本体的一端与所述第二本体固定连接。
8、在一种可能的设计中,所述转动组件还包括扭簧,所述扭簧套设于所述销轴,且所述扭簧的一端固定连接于所述第一本体,所述扭簧的另一端固定连接于所述销轴。
9、在一种可能的设计中,所述第一本体上设置有第一容纳腔,所述销轴的至少部分部位伸入至所述第一容纳腔中,所述扭簧套设于所述销轴上位于所述第一容纳腔中的部分部位。
10、在一种可能的设计中,所述转动组件还包括卡环,所述卡环套设于所述销轴上位于所述第一容纳腔中的部分部位,且所述卡环的一面与所述第一容纳腔的内壁接触。
11、在一种可能的设计中,所述转动组件还包括锁止销,沿垂直于所述销轴的轴线方向,所述销轴上远离所述第一本体的一端设置有第一锁止孔,所述第二本体上设置有第二锁止孔,所述锁止销固定穿设于所述第一锁止孔和所述第二锁止孔中。
12、在一种可能的设计中,所述第二本体设置有第二容纳腔,所述销轴上用于与所述锁止销配合的一端位于所述第二容纳腔中。
13、在一种可能的设计中,所述第一本体上设置有用于连接所述驱动机构的固定孔。
14、本申请的第二方面还提供了一种货叉组件,其中,包括货叉本体和安装在所述货叉本体上的本申请第一方面提供的手指结构。
15、本申请的第三方面还提供了一种搬运机器人,其中,包括支撑座、升降装置和本申请第二方面提供的货叉组件,所述升降装置和所述货叉组件设置在所述支撑座上,所述升降装置连接所述货叉组件,用于驱动所述货叉组件相对于所述支撑座升降。
16、本申请提供的技术方案可以达到以下有益效果:
17、本申请提供的手指结构、货叉组件及搬运机器人,通过使第一本体和第二本体之间采用一种转动连接的方式,可以使第二本体能够根据待夹持的料箱的侧壁形态而自适应转动调整,使第二本体的夹持面能够与料箱的侧面可靠贴合,形成稳定的面接触,从而能够实现对各种直插箱、斜插箱等不同料箱的夹紧,既保证了对料箱夹紧的可靠性,又能够避免对料箱局部压强过大而造成料箱压损,通过使第二本体与料箱之间面接触的方式,也能够保证该手指结构受力均衡,避免手指结构撕裂的问题。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种手指结构,其特征在于,包括:
2.根据权利要求1所述的手指结构,其特征在于,所述转动组件(3)包括销轴(31)和轴承(32),所述轴承(32)安装于所述第一本体(1),所述销轴(31)通过所述轴承(32)与所述第一本体(1)转动连接;
3.根据权利要求2所述的手指结构,其特征在于,所述转动组件(3)还包括扭簧(33),所述扭簧(33)套设于所述销轴(31),且所述扭簧(33)的一端固定连接于所述第一本体(1),所述扭簧(33)的另一端固定连接于所述销轴(31)。
4.根据权利要求3所述的手指结构,其特征在于,所述第一本体(1)上设置有第一容纳腔(11),所述销轴(31)的至少部分部位伸入至所述第一容纳腔(11)中,所述扭簧(33)套设于所述销轴(31)上位于所述第一容纳腔(11)中的部分部位。
5.根据权利要求4所述的手指结构,其特征在于,所述转动组件(3)还包括卡环(35),所述卡环(35)套设于所述销轴(31)上位于所述第一容纳腔(11)中的部分部位,且所述卡环(35)的一面与所述第一容纳腔(11)的内壁接触。
6.根据权利要求2所述的手指结构,其特征在于,所述转动组件(3)还包括锁止销(34),沿垂直于所述销轴(31)的轴线方向,所述销轴(31)上远离所述第一本体(1)的一端设置有第一锁止孔(313),所述第二本体(2)上设置有第二锁止孔(22),所述锁止销(34)固定穿设于所述第一锁止孔和所述第二锁止孔(22)中。
7.根据权利要求6所述的手指结构,其特征在于,所述第二本体(2)设置有第二容纳腔(21),所述销轴(31)上用于与所述锁止销(34)配合的一端位于所述第二容纳腔(21)中。
8.根据权利要求1-7任一项所述的手指结构,其特征在于,所述第一本体(1)上设置有用于连接所述驱动机构的固定孔(12)。
9.一种货叉组件,其特征在于,包括货叉本体(61)和安装在所述货叉本体(61)上的权利要求1-8任一项所述的手指结构(62)。
10.一种搬运机器人,其特征在于,包括支撑座(4)、升降装置(5)和如权利要求9所述的货叉组件(6),所述升降装置(5)和所述货叉组件(6)设置在所述支撑座(4)上,所述升降装置(5)连接所述货叉组件(6),用于驱动所述货叉组件(6)相对于所述支撑座(4)升降。
技术总结
本申请提供了一种手指结构、货叉组件及搬运机器人,其中,该手指结构包括第一本体、第二本体和转动组件,其中,该第一本体用于与货叉组件中的驱动机构连接,第二本体用于夹持料箱,转动组件的一端与第一本体和第二本体中的一者固定连接,转动组件的另一端与第一本体和第二本体中的另一者转动连接。本申请可以使第二本体能够根据待夹持的料箱的侧壁形态而自适应转动调整,使第二本体的夹持面能够与料箱的侧面可靠贴合,从而能够实现对各种直插箱、斜插箱等夹紧,既保证了对料箱夹紧的可靠性,又能够避免对料箱局部压强过大而造成料箱压损,通过使第二本体与料箱之间面接触的方式,也能够保证该手指结构受力均衡,避免手指结构撕裂的问题。
技术研发人员:陈康,龙德荣
受保护的技术使用者:深圳市海柔创新科技有限公司
技术研发日:20230506
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!