一种有轨履带式立体仓储机器人的制作方法
本技术涉及了仓储输送设备,尤其涉及一种有轨履带式立体仓储机器人。
背景技术:
1、常规立体仓储机器人都是数个单独的轮子进行支撑和驱动,轮子容易磨损,磨损后导致轮径变小,立体仓储机器人的行走距离不符合设定距离,定位不准,导致立体仓储机器人相互碰撞,容易导致货物倾倒或立体仓储机器人损坏,造成经济损失。
2、同时常规技术下,立体仓储机器人在通过轨道的缺口时,轮子会与缺口边沿撞击,会产生的噪音和震动,频繁的震动也会使托盘和货物产生位置移动,导致货物掉落,频繁的震动还容易导致轮子损坏,轮子损坏会产生额外的维修费用,增加使用成本。
技术实现思路
1、本实用新型的目的是为了克服现有技术的不足,提供一种有轨履带式立体仓储机器人,能够提高对货物运输的平稳性和可靠性。
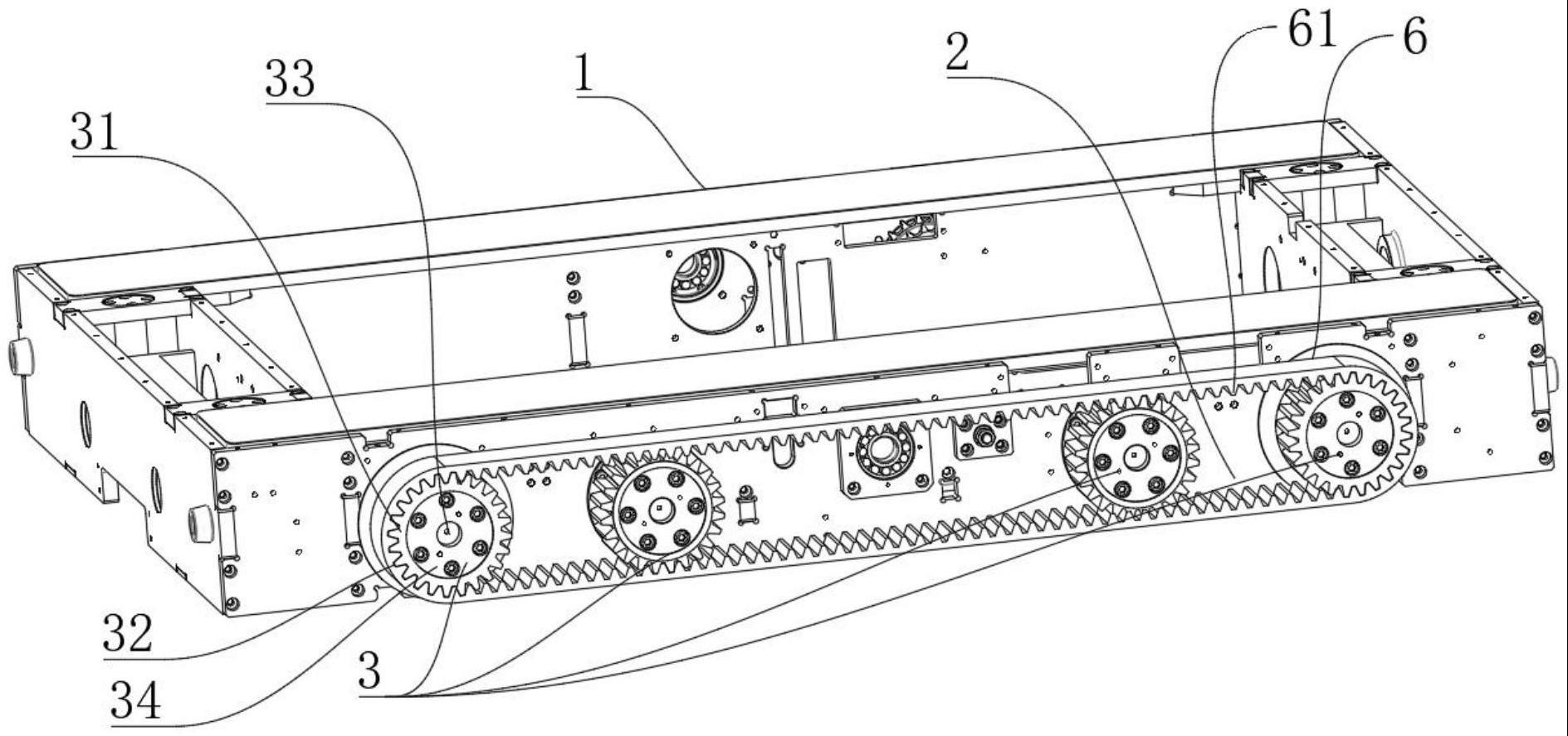
2、本实用新型涉及的一种有轨履带式立体仓储机器人,包括在轨道上运行的机器人本体,所述机器人本体与运动方向平行的两侧面被定义为安装面,所述安装面上可转动的连接有若干个轮子,若干个所述轮子包括至少一个驱动轮和至少一个从动轮,每个所述安装面上包括一个所述驱动轮和一个所述从动轮,所述驱动轮和所述从动轮分别与驱动二者同步运动的履带连接,所述驱动轮和所述从动轮的圆周至少部分与所述履带接触,若干个所述轮子包括至少一个导向轮,每个所述安装面上可转动连接有至少一个所述导向轮,所述导向轮设置在驱动轮与所述从动轮之间,所述导向轮的圆周至少部分与所述履带接触。
3、进一步地,所述轮子上套接有匹配轮,所述匹配轮的圆周上开设有若干的驱动齿,所述履带的内表面开设有带齿,所述驱动齿与所述带齿咬合。
4、进一步地,每个所述安装面上连接有两个所述导向轮,两个所述导向轮沿所述机器人本体的中轴线为轴对称设置。
5、进一步地,所述轮子包括转动轴和轮体,所述转动轴与所述安装面连接,所述轮体与所述转动轴可转动式连接,所述匹配轮套接在所述轮体上。
6、本实用新型的有益之处在于:履带通过轨道缺口时可以避免轮子和缺口边缘撞击,从而避免产生噪音和震动;避免了货物在震动下产生位置移动,使得立体仓储机器人更加可靠稳定;通过采用履带,还能避免轮子磨损造成的立体仓储机器人定位不准,降低立体仓储机器人相互碰撞的几率,进一步提高立体仓储机器人运行的稳定性。
7、为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种有轨履带式立体仓储机器人,其特征在于:包括在轨道上运行的机器人本体,所述机器人本体与运动方向平行的两侧面被定义为安装面,所述安装面上可转动的连接有若干个轮子,若干个所述轮子包括至少一个驱动轮和至少一个从动轮,每个所述安装面上包括一个所述驱动轮和一个所述从动轮,所述驱动轮和所述从动轮分别与驱动二者同步运动的履带连接,所述驱动轮和所述从动轮的圆周至少部分与所述履带接触,若干个所述轮子包括至少一个导向轮,每个所述安装面上可转动连接有至少一个所述导向轮,所述导向轮设置在驱动轮与所述从动轮之间,所述导向轮的圆周至少部分与所述履带接触。
2.根据权利要求1所述的有轨履带式立体仓储机器人,其特征在于:所述轮子上套接有匹配轮,所述匹配轮的圆周上开设有若干的驱动齿,所述履带的内表面开设有带齿,所述驱动齿与所述带齿咬合。
3.根据权利要求1所述的有轨履带式立体仓储机器人,其特征在于:每个所述安装面上连接有两个所述导向轮,两个所述导向轮沿所述机器人本体的中轴线为轴对称设置。
4.根据权利要求2所述的有轨履带式立体仓储机器人,其特征在于:所述轮子包括转动轴和轮体,所述转动轴与所述安装面连接,所述轮体与所述转动轴可转动式连接,所述匹配轮套接在所述轮体上。
技术总结
本技术涉及的一种有轨履带式立体仓储机器人,包括在轨道上运行的机器人本体,机器人本体与运动方向平行的两侧面被定义为安装面,安装面上可转动的连接有若干个轮子,若干个轮子包括至少一个驱动轮和至少一个从动轮,每个安装面上包括一个驱动轮和一个从动轮,驱动轮和从动轮分别与驱动二者同步运动的履带连接,若干个轮子包括至少一个导向轮,每个安装面上可转动连接有至少一个导向轮,导向轮设置在驱动轮与从动轮之间,导向轮的圆周至少部分与履带接触。本技术的有益之处在于:履带通过轨道缺口时可以避免轮子和缺口边缘撞击,从而避免产生噪音和震动;避免了货物在震动下产生位置移动,使得立体仓储机器人更加可靠稳定。
技术研发人员:郭科,程昌顺,郭筱松,卜浩飞,李宜傲
受保护的技术使用者:苏州魔仓机器人有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!