一种标准棒材仓库运输机器人的制作方法
本技术涉及棒材运输,具体为一种标准棒材仓库运输机器人。
背景技术:
1、长度与截面周长之比相当大,横截面无明显的凸凹部分的金属塑性加工的直条制品,也称棒材或普通断面型材,包括方形、圆形、扁形和六角形型材,断面形状为正方形,其规格以边长的大小表示,有尖角方钢和圆角方钢之分。后者一般作为中、小轧机的坯料,常见规格为5.5~200mm,它可用来制造各种设备的零部件、围栏等,圆钢,用直径大小表示规格,常见圆钢直径为5.5~250mm,中国习惯上将10mm以下的圆钢称为线材,直径10~25mm圆钢是常用的建筑钢筋,也用于制造螺栓等零件,直径大于30mm的圆钢用于制造各类机械零件,而棒材在使用中会使用到仓库运输机器人进行搬运,随着科技及仓储物流的智能化发展,智能机器人得到了普及,agv便是一种智能仓储物流中重要的转运机器人,现有仓储物流中,通常是将货物放入料箱中,搬运机器人通过搬运料箱的方式完成货物在不同位置的流转。
2、例如公开号cn216376420u,本实用新型涉及一种棒材搬运机器人,包括底盘组件、承载组件和驱动组件;其中,承载组件设置在底盘组件上且具有第一位置和第二位置;承载组件具有与棒材相适配的尺寸,并被构造为用于承载棒材;驱动组件被构造为驱动承载组件在第一位置和第二位置之间运动;在第一位置时,承载组件相对于底盘组件呈第一预定角度;在第二位置时,承载组件相对于底盘组件呈第二预定角度。本实用新型的棒材搬运机器人自动完成搬运棒料的任务,具备较高的智能化水平,符合当前搬运机器人领域无人化、智能化的市场需求,搬运效率高。
3、现有的运输机器人在使用中,虽然具备了搬运效率高的优点,但运输机器人在使用中不具备定位结构,这就导致运输机器人在对棒材进行搬运时,受棒材重量的影响,易导致运输机器人出现滑动,无法稳定的对运输机器人进行搬运的情况,同时运输机器人在卸货中,也会出现活动轮受力滑动的情况,这就导致运输机器人在对棒材进行搬运时稳定性较差,因此运输机器人在对棒材进行搬运时无法进行定位支撑,降低了运输机器人的使用效果。
技术实现思路
1、为解决上述背景技术中提出的问题,本实用新型的目的在于提供一种标准棒材仓库运输机器人,具备了调节定位的优点,解决了现有的运输机器人在使用中,虽然具备了搬运效率高的优点,但运输机器人在使用中不具备定位结构,这就导致运输机器人在对棒材进行搬运时,受棒材重量的影响,易导致运输机器人出现滑动,无法稳定的对运输机器人进行搬运的情况,同时运输机器人在卸货中,也会出现活动轮受力滑动的情况,这就导致运输机器人在对棒材进行搬运时稳定性较差,因此运输机器人在对棒材进行搬运时无法进行定位支撑,降低了运输机器人使用效果的问题。
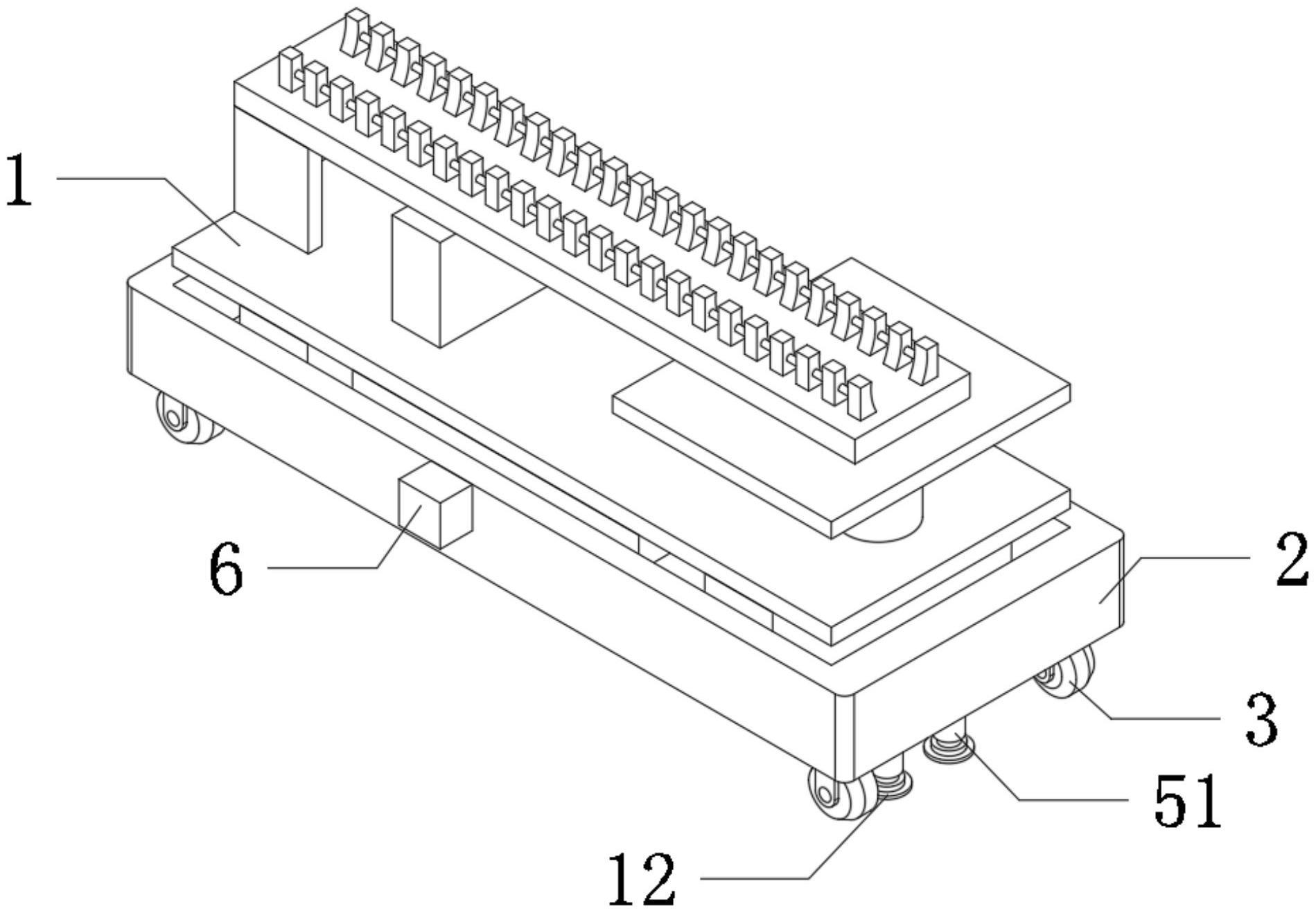
2、为实现上述目的,本实用新型提供如下技术方案:一种标准棒材仓库运输机器人,包括运输机器人本体、支撑板和活动轮,所述运输机器人本体的底部与支撑板的顶部固定连接,所述支撑板的底部与活动轮的顶部活动安装,所述支撑板的底部固定连接有传动调节组件,所述支撑板底部的四角均设置有调节限位组件,所述支撑板的正面固定连接有控制箱。
3、作为本实用新型优选的,所述传动调节组件包括电机,所述电机的输出端固定连接有减速器,所述减速器的左侧固定连接有固定齿轮,所述固定齿轮的左侧固定连接有活动齿轮,所述活动齿轮的内部固定连接有蜗杆,所述蜗杆外侧的两侧均固定连接有涡轮。
4、作为本实用新型优选的,所述调节限位组件包括限位柱,所述限位柱的内部与涡轮的内部固定连接,所述限位柱的底部开设有活动槽,所述活动槽的内部螺纹连接有支撑杆,所述支撑杆的底部固定连接有支撑环。
5、作为本实用新型优选的,所述限位柱表面的顶部固定连接有限位环,所述支撑板底部的四角均固定连接有固定环,所述固定环的底部开设有限位槽,所述限位环的表面与限位槽的内部活动连接。
6、作为本实用新型优选的,所述支撑杆的顶部开设有滑槽,所述滑槽的内部活动连接有滑块,所述滑块的顶部与支撑板的底部固定连接。
7、作为本实用新型优选的,所述电机的底部固定连接有防护箱,所述防护箱的顶部与支撑板的底部固定连接。
8、作为本实用新型优选的,所述支撑环的底部固定连接有弹性环,所述支撑板的底部固定连接有防护盒。
9、与现有技术相比,本实用新型的有益效果如下:
10、1、本实用新型通过设置控制箱启动传动调节组件,使传动调节组件配合调节限位组件对支撑板的使用进行支撑定位,解决了现有的运输机器人在使用中,虽然具备了搬运效率高的优点,但运输机器人在使用中不具备定位结构,这就导致运输机器人在对棒材进行搬运时,受棒材重量的影响,易导致运输机器人出现滑动,无法稳定的对运输机器人进行搬运的情况,同时运输机器人在卸货中,也会出现活动轮受力滑动的情况,这就导致运输机器人在对棒材进行搬运时稳定性较差,因此运输机器人在对棒材进行搬运时无法进行定位支撑,降低了运输机器人使用效果的问题,达到了调节定位的效果。
11、2、本实用新型通过设置传动调节组件,在使用中能够通过控制箱启动电机,使电机输出端旋转带动减速器进行旋转,减速器旋转能够带动固定齿轮进行旋转,固定齿轮旋转能够带动活动齿轮进行旋转,活动齿轮旋转能够带动蜗杆进行旋转,蜗杆旋转能够带动涡轮进行旋转。
12、3、本实用新型通过设置调节限位组件,在使用中涡轮进行旋转时能够带动限位柱进行旋转,限位柱旋转能够与支撑杆的表面螺纹传动,从而能够使支撑杆向下移动,支撑杆移动能够推动支撑环进行移动,支撑环移动能够对支撑板的底部进行稳定的支撑,能够避免在使用中出现支撑不稳定的情况。
技术特征:
1.一种标准棒材仓库运输机器人,包括运输机器人本体(1)、支撑板(2)和活动轮(3),其特征在于:所述运输机器人本体(1)的底部与支撑板(2)的顶部固定连接,所述支撑板(2)的底部与活动轮(3)的顶部活动安装,所述支撑板(2)的底部固定连接有传动调节组件(4),所述支撑板(2)底部的四角均设置有调节限位组件(5),所述支撑板(2)的正面固定连接有控制箱(6)。
2.根据权利要求1所述的一种标准棒材仓库运输机器人,其特征在于:所述传动调节组件(4)包括电机(41),所述电机(41)的输出端固定连接有减速器(42),所述减速器(42)的左侧固定连接有固定齿轮(43),所述固定齿轮(43)的左侧固定连接有活动齿轮(44),所述活动齿轮(44)的内部固定连接有蜗杆(45),所述蜗杆(45)外侧的两侧均固定连接有涡轮(46)。
3.根据权利要求2所述的一种标准棒材仓库运输机器人,其特征在于:所述调节限位组件(5)包括限位柱(51),所述限位柱(51)的内部与涡轮(46)的内部固定连接,所述限位柱(51)的底部开设有活动槽(52),所述活动槽(52)的内部螺纹连接有支撑杆(53),所述支撑杆(53)的底部固定连接有支撑环(54)。
4.根据权利要求3所述的一种标准棒材仓库运输机器人,其特征在于:所述限位柱(51)表面的顶部固定连接有限位环(7),所述支撑板(2)底部的四角均固定连接有固定环(8),所述固定环(8)的底部开设有限位槽(9),所述限位环(7)的表面与限位槽(9)的内部活动连接。
5.根据权利要求3所述的一种标准棒材仓库运输机器人,其特征在于:所述支撑杆(53)的顶部开设有滑槽(10),所述滑槽(10)的内部活动连接有滑块(11),所述滑块(11)的顶部与支撑板(2)的底部固定连接。
6.根据权利要求2所述的一种标准棒材仓库运输机器人,其特征在于:所述电机(41)的底部固定连接有防护箱(12),所述防护箱(12)的顶部与支撑板(2)的底部固定连接。
7.根据权利要求3所述的一种标准棒材仓库运输机器人,其特征在于:所述支撑环(54)的底部固定连接有弹性环(13),所述支撑板(2)的底部固定连接有防护盒(14)。
技术总结
本技术公开了一种标准棒材仓库运输机器人,包括运输机器人本体、支撑板和活动轮。本技术通过设置控制箱启动传动调节组件,使传动调节组件配合调节限位组件对支撑板的使用进行支撑定位,解决了现有的运输机器人在使用中,虽然具备了搬运效率高的优点,但运输机器人在使用中不具备定位结构,这就导致运输机器人在对棒材进行搬运时,受棒材重量的影响,易导致运输机器人出现滑动,无法稳定的对运输机器人进行搬运的情况,同时运输机器人在卸货中,也会出现活动轮受力滑动的情况,这就导致运输机器人在对棒材进行搬运时稳定性较差,因此运输机器人在对棒材进行搬运时无法进行定位支撑,降低了运输机器人使用效果的问题。
技术研发人员:沈飞
受保护的技术使用者:上海力睿精密金属有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!