一种码垛抓取装置与自动配盘设备的制作方法
本技术涉及生产设备,具体涉及一种码垛抓取装置与自动配盘设备。
背景技术:
1、当前,生产中常需要大量不同类型的辅料,如在生产卷烟的过程中,其中包含有大量卷烟纸、接装纸、包装膜等盘状辅料或箱状辅料。为减少场地占用,通常需要按照生产计划进行卷烟辅料的配盘作业,然后放置于辅料平衡库进行温湿度的平衡。辅料的配盘是指将不同类型辅料按照一定的数量,不同的品种,码放方式拣选到托盘上。
2、自动配盘设备是针对承托货物的托盘、隔板等物料进行分配、拆垛、码垛、输送的全自动化设备。目前自动配盘装置的码垛抓取装置多采用机械臂实现,以此实现对多种物料或托盘进行抓取,并且会根据抓取的物料大小来选择相应的机械臂大小,然而此类码垛抓取装置在面对如托盘、隔板此类大体积、小质量、小范围移动需求时,采用过小的机械臂无法满足抓取需求,选择过大的机械臂不仅会浪费机械手的使用性能以及场地的空间,机械臂的操控精准难度也会随之增加;其次,此类码垛抓取装置的抓取部分通常只能抓取单一品种或单一形状的物料,无法抓取多种类型的物料,如要完成同时对于多种类型的物料抓取,则需要配置多台机械臂,造成一定的成本负担;因此,亟需一种能够适用于自动配盘设备的抓取需求,能够适应大体积、小质量、小范围移动,且满足多种不同类型的抓取目标的需求的码垛抓取装置。
技术实现思路
1、为了克服现有技术的不足,本实用新型的目的在于提供一种码垛抓取装置与自动配盘设备,能够满足在小范围内抓取尺寸稍大且较轻的物料,且适用于不同类型物料的抓取,解决了目前采用的大型机械臂在小范围运行的不便,小型机械臂无法抓取稍大货物的不便,且可抓取多种不同种类的物料进行转运。
2、本实用新型的目的之一在于提供一种码垛抓取装置,采用如下技术方案实现:包括第一支架、抓取组件与吸盘组件;
3、所述抓取组件包括抓手驱动机构、第一抓取机构与第二抓取机构,所述第一抓取机构与所述第二抓取机构分别铰接于所述第一支架相对的两端,通过所述抓手驱动机构驱动所述第一抓取机构与所述第二抓取机构相对于所述第一支架旋转,从而使所述第一抓取机构与所述第二抓取机构端部相互靠近或分离,从而对物料进行抓取或松开;
4、所述吸盘组件设置于所述第一支架底部,所述吸盘组件包括若干吸盘,所述吸盘设置于所述第一支架底部,所述吸盘用于吸附物料。
5、一种可选的实施方式中,所述第一抓取机构包括转轴与抓手,两所述抓手分别固定于所述转轴两端,所述转轴与所述第一支架端部转动连接,从而使所述抓手可相对于第一支架旋转。
6、一种可选的实施方式中,所述抓手驱动机构为气缸,所述气缸一端铰接于所述第一支架,另一端铰接有抓取连杆,所述抓取连杆另一端与所述转轴固定,通过所述气缸的伸出或缩回,带动所述转轴转动,从而带动所述抓手转动。
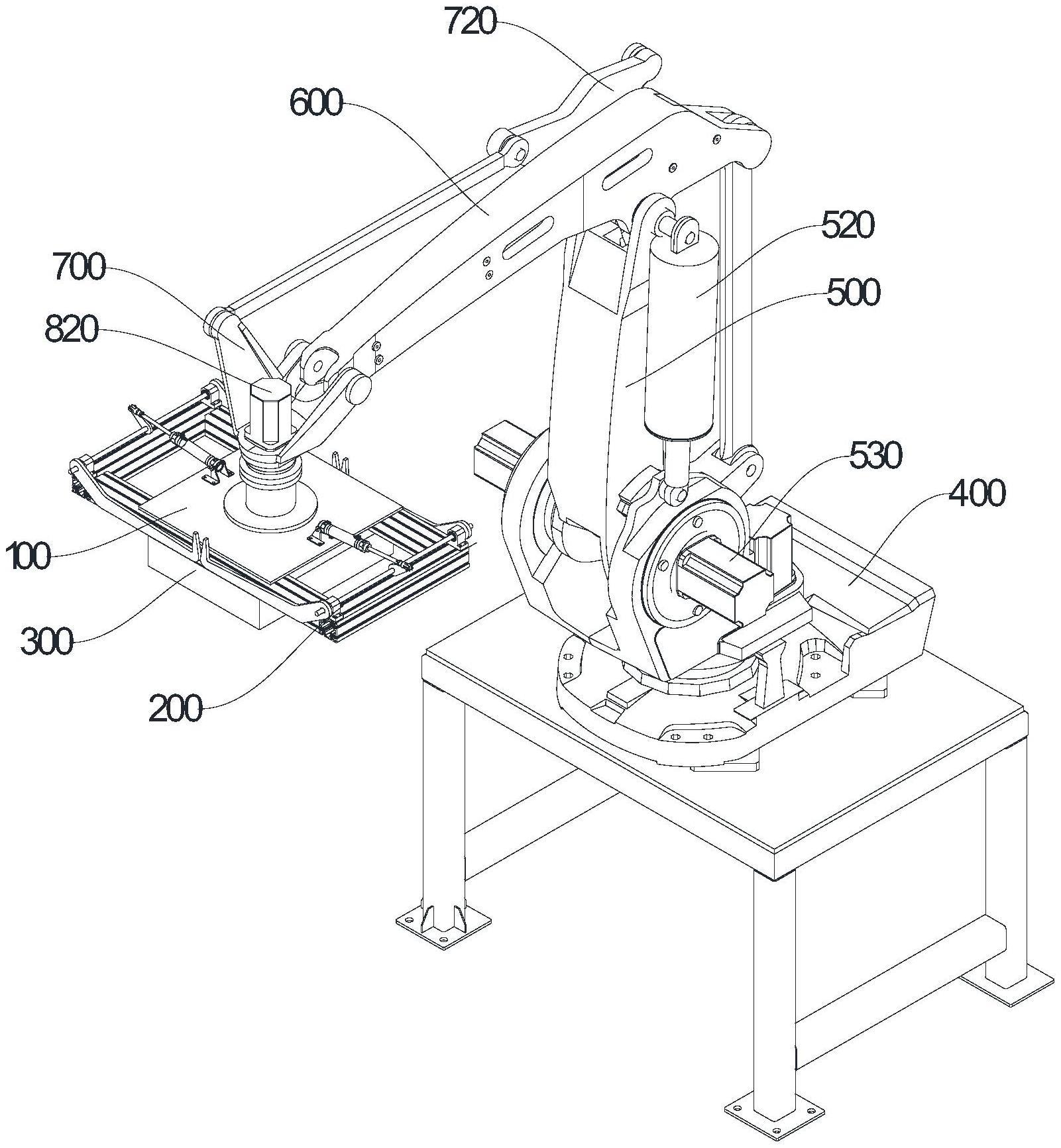
7、本实用新型的目的之二在于提供一种自动配盘设备,采用如下技术方案实现:包括固定法兰、机械臂与如本实用新型的目的之一任一项所述的码垛抓取装置;所述机械臂一端与固定法兰连接,另一端与所述的码垛抓取装置连接。
8、一种可选的实施方式中,所述机械臂包括底座组件、第一摆臂组件、第二摆臂组件与第三摆臂组件;所述第一摆臂组件与所述底座组件转动连接,所述第二摆臂组件一端与所述第一摆臂组件远离所述底座组件的一端铰接,所述第二摆臂组件另一端与所述第三摆臂组件铰接;
9、所述底座组件包括底座驱动机构与底座,所述底座转动连接于所述固定法兰,连接处形成转动轴,所述转动轴竖直设置,所述底座驱动机构具有输出轴,所述底座驱动机构输出轴与所述底座联动,通过所述底座驱动机构提供动力,带动所述底座相对于固定法兰旋转。
10、一种可选的实施方式中,所述第一摆臂组件包括第一摆臂与第一驱动机构,所述第一摆臂两端分别形成第一端部与第二端部,所述第一端部与所述底座组件铰接,铰接处形成铰接轴,所述铰接轴水平设置,所述第一驱动机构具有输出轴,所述第一驱动机构输出轴与所述第一摆臂联动,通过所述第一驱动机构提供动力,带动所述第一摆臂相对于底座旋转。
11、一种可选的实施方式中,所述第一摆臂组件还包括摆臂气缸;所述摆臂气缸一端所述第二端部铰接,另一端与所述底座组件铰接,通过所述摆臂气缸的伸缩提供动力,带动所述第一摆臂相对于所述底座旋转。
12、一种可选的实施方式中,所述第二摆臂组件包括第二摆臂、第一连杆与第二驱动机构,所述第二摆臂两端分别形成第三端部与第四端部,所述第三端部与所述第四端部之间形成有支撑部,所述支撑部与所述第一摆臂组件铰接,所述第一连杆一端与所述第三端部铰接,另一端与所述第二驱动机构联动;由所述第二驱动机构提供动力,通过所述第一连杆带动所述第二摆臂相对于所述第一摆臂组件绕支撑部转动。
13、一种可选的实施方式中,所述第三摆臂组件包括第三摆臂与连杆结构;所述第三摆臂两端分别形成第六端部与第七端部,所述第六端部与第二摆臂组件铰接,从而使所述第三摆臂可相对于所述第二摆臂组件转动;所述连杆结构包括依次铰接的第二连杆、第三连杆与第四连杆,所述第二连杆端部与所述底座铰接,所述第三连杆与所述第二摆臂铰接,所述第四连杆端部与所述第三摆臂铰接。
14、一种可选的实施方式中,所述第三摆臂第七端部设置有第二安装法兰与第三驱动机构,所述第二安装法兰转动连接于所述第七端部,所述第二安装法兰用于安装码垛抓取装置,所述第三驱动机构与所述第二安装法兰联动,由所述第三驱动机构带动所述第二安装法兰旋转。
15、相比现有技术,本实用新型的有益效果在于:
16、1、本实用新型的码垛抓取装置通过设置第二抓取机构与第一抓取机构,同时配合吸盘组件进行抓取,能够自适应不同尺寸、重量,不同类型的物料的抓取。且由多个抓手与吸盘的配合,进一步加强了抓取稳定性,防止抓持过程中物料的滑动或掉落,抓取效果好。同时抓手的设置能够进一步帮助物料卸除,实用性强。
17、2、本实用新型的自动配盘设备,通过设置底座组件将设备进行安装固定,通过设置第一摆臂组件、第二摆臂组件与第三摆臂组件,第一摆臂组件与底座组件转动连接,第二摆臂组件一端与第一摆臂组件铰接,另一端与第三摆臂组件铰接,第三摆臂组件上转动连接第二安装法兰,第二安装法兰用于安装码垛抓取装置,如此对码垛抓取装置的各方位进行调节控制,实现物料的转移。
技术特征:
1.一种码垛抓取装置,其特征在于,包括第一支架、抓取组件与吸盘组件;
2.根据权利要求1所述的一种码垛抓取装置,其特征在于,所述第一抓取机构包括转轴与抓手,两所述抓手分别固定于所述转轴两端,所述转轴与所述第一支架端部转动连接,从而使所述抓手可相对于第一支架旋转。
3.根据权利要求2所述的一种码垛抓取装置,其特征在于,所述抓手驱动机构为气缸,所述气缸一端铰接于所述第一支架,另一端铰接有抓取连杆,所述抓取连杆另一端与所述转轴固定,通过所述气缸的伸出或缩回,带动所述转轴转动,从而带动所述抓手转动。
4.一种自动配盘设备,其特征在于,包括固定法兰、机械臂与如权利要求1-3任一项所述的码垛抓取装置;所述机械臂一端与固定法兰连接,另一端与所述的码垛抓取装置连接。
5.根据权利要求4所述的一种自动配盘设备,其特征在于,所述机械臂包括底座组件、第一摆臂组件、第二摆臂组件与第三摆臂组件;所述第一摆臂组件与所述底座组件转动连接,所述第二摆臂组件一端与所述第一摆臂组件远离所述底座组件的一端铰接,所述第二摆臂组件另一端与所述第三摆臂组件铰接;
6.根据权利要求5所述的一种自动配盘设备,其特征在于,所述第一摆臂组件包括第一摆臂与第一驱动机构,所述第一摆臂两端分别形成第一端部与第二端部,所述第一端部与所述底座组件铰接,铰接处形成铰接轴,所述铰接轴水平设置,所述第一驱动机构具有输出轴,所述第一驱动机构输出轴与所述第一摆臂联动,通过所述第一驱动机构提供动力,带动所述第一摆臂相对于底座旋转。
7.根据权利要求6所述的一种自动配盘设备,其特征在于,所述第一摆臂组件还包括摆臂气缸;所述摆臂气缸一端所述第二端部铰接,另一端与所述底座组件铰接,通过所述摆臂气缸的伸缩提供动力,带动所述第一摆臂相对于所述底座旋转。
8.根据权利要求5所述的一种自动配盘设备,其特征在于,所述第二摆臂组件包括第二摆臂、第一连杆与第二驱动机构,所述第二摆臂两端分别形成第三端部与第四端部,所述第三端部与所述第四端部之间形成有支撑部,所述支撑部与所述第一摆臂组件铰接,所述第一连杆一端与所述第三端部铰接,另一端与所述第二驱动机构联动;由所述第二驱动机构提供动力,通过所述第一连杆带动所述第二摆臂相对于所述第一摆臂组件绕支撑部转动。
9.根据权利要求5所述的一种自动配盘设备,其特征在于,所述第三摆臂组件包括第三摆臂与连杆结构;所述第三摆臂两端分别形成第六端部与第七端部,所述第六端部与第二摆臂组件铰接,从而使所述第三摆臂可相对于所述第二摆臂组件转动;所述连杆结构包括依次铰接的第二连杆、第三连杆与第四连杆,所述第二连杆端部与所述底座铰接,所述第三连杆与所述第二摆臂铰接,所述第四连杆端部与所述第三摆臂铰接。
10.根据权利要求9所述的一种自动配盘设备,其特征在于,所述第三摆臂第七端部设置有第二安装法兰与第三驱动机构,所述第二安装法兰转动连接于所述第七端部,所述第二安装法兰用于安装码垛抓取装置,所述第三驱动机构与所述第二安装法兰联动,由所述第三驱动机构带动所述第二安装法兰旋转。
技术总结
本技术公开了码垛抓取装置与自动配盘设备,包括第一支架、抓取组件与吸盘组件;抓取组件包括抓手驱动机构、第一抓取机构与第二抓取机构,第一抓取机构与第二抓取机构分别铰接于第一支架相对的两端,通过抓手驱动机构驱动第一抓取机构与第二抓取机构相对于第一支架旋转,从而使第一抓取机构与第二抓取机构端部相互靠近或分离,从而对物料进行抓取或松开;吸盘组件设置于所述第一支架底部,吸盘组件包括若干吸盘,吸盘设置于第一支架底部,吸盘用于吸附物料。本技术能够满足在小范围内抓取尺寸稍大且较轻的物料,且适用于不同类型物料的抓取。
技术研发人员:梁德英,陈玉双,黄荟婕,于荣,颜志刚,王锦强,梁文鼎
受保护的技术使用者:广州创孚智能科技有限公司
技术研发日:20230527
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!